Vous aimerez peut-être aussi
- PIR-SENSOR DE PRESENCIA IR-Lic. Edgardo Faletti (2014)Document1 pagePIR-SENSOR DE PRESENCIA IR-Lic. Edgardo Faletti (2014)Forumsur ArgentinaPas encore d'évaluation
- Modulo L298N Doble Puente H Driver Stepper (Arduino)Document3 pagesModulo L298N Doble Puente H Driver Stepper (Arduino)Forumsur Argentina100% (1)
- Matriz Leds 3 X 3 Controlado Por ARDUINO UNODocument2 pagesMatriz Leds 3 X 3 Controlado Por ARDUINO UNOForumsur ArgentinaPas encore d'évaluation
- Sensores: Tipos de Salidas - Lic. Edgardo Faletti-2014Document1 pageSensores: Tipos de Salidas - Lic. Edgardo Faletti-2014Forumsur ArgentinaPas encore d'évaluation
- Programa para ARDUINO UNO/ Auto Fantástico-Lic Edgardo FalettiDocument1 pagePrograma para ARDUINO UNO/ Auto Fantástico-Lic Edgardo FalettiForumsur ArgentinaPas encore d'évaluation
- Servo Sg90Document1 pageServo Sg90Forumsur ArgentinaPas encore d'évaluation
- Módulo YL69 y YL38Document1 pageMódulo YL69 y YL38Forumsur Argentina50% (2)
- Tips de Arduino-Lic. Edgardo Faletti (2014)Document3 pagesTips de Arduino-Lic. Edgardo Faletti (2014)Forumsur ArgentinaPas encore d'évaluation
- Motor Paso A Paso 28BYJ-48 y Driver ULN2003 para ArduinoDocument2 pagesMotor Paso A Paso 28BYJ-48 y Driver ULN2003 para ArduinoForumsur ArgentinaPas encore d'évaluation
- Mecánica Del Corte - 2º Parte-Lic. Edgardo Faletti - 2014Document6 pagesMecánica Del Corte - 2º Parte-Lic. Edgardo Faletti - 2014EdgardoOmarPas encore d'évaluation
- Programas para Realizar Con El MacroPLC - Lic. Prof. Edgardo Faletti (2014)Document7 pagesProgramas para Realizar Con El MacroPLC - Lic. Prof. Edgardo Faletti (2014)Forumsur ArgentinaPas encore d'évaluation
- Rele Optoacoplado-Lic. Edgardo Faleti-2014Document2 pagesRele Optoacoplado-Lic. Edgardo Faleti-2014Forumsur ArgentinaPas encore d'évaluation
- Llaves de Final de CarreraDocument5 pagesLlaves de Final de CarreraForumsur ArgentinaPas encore d'évaluation
- Disyuntor Diferencial (2014) - Lic. Prof. Edgardo FalettiDocument4 pagesDisyuntor Diferencial (2014) - Lic. Prof. Edgardo FalettiForumsur ArgentinaPas encore d'évaluation
- Sensor: Topologias de La Etapa de Salida: NPN y PNP - Lic Edgardo Faletti-2014Document2 pagesSensor: Topologias de La Etapa de Salida: NPN y PNP - Lic Edgardo Faletti-2014Forumsur ArgentinaPas encore d'évaluation
- Llave Final de Carrera - Lic. Edgardo Faletti (2014)Document3 pagesLlave Final de Carrera - Lic. Edgardo Faletti (2014)Forumsur ArgentinaPas encore d'évaluation
- COMUNICACIONES POR SATÉLITE-Prof. Edgardo Faletti-2005Document20 pagesCOMUNICACIONES POR SATÉLITE-Prof. Edgardo Faletti-2005Forumsur ArgentinaPas encore d'évaluation
- Mecánica Del Corte (1º Parte) - Lic. Prof. Edgardo Faletti-2014Document13 pagesMecánica Del Corte (1º Parte) - Lic. Prof. Edgardo Faletti-2014Forumsur ArgentinaPas encore d'évaluation
- Disyuntor Diferencial. Lic. Prof. Edgardo Faletti-2011Document6 pagesDisyuntor Diferencial. Lic. Prof. Edgardo Faletti-2011Forumsur ArgentinaPas encore d'évaluation
- PLC Direct Logic05 - Prof. Faletti - 2012Document16 pagesPLC Direct Logic05 - Prof. Faletti - 2012Forumsur ArgentinaPas encore d'évaluation
- Transmisión y Recepción en B.L.U. - Prof. Faletti-2005Document9 pagesTransmisión y Recepción en B.L.U. - Prof. Faletti-2005Forumsur ArgentinaPas encore d'évaluation
- Escuelas TecnicasDocument40 pagesEscuelas TecnicasForumsur ArgentinaPas encore d'évaluation
- Introducción A Las Fibras Ópticas. Lic. Prof. Edgardo Faletti-2013Document15 pagesIntroducción A Las Fibras Ópticas. Lic. Prof. Edgardo Faletti-2013Forumsur ArgentinaPas encore d'évaluation
- TELEVISIÓN ANALÓGICA-Prof. Edgardo Faletti-2003Document28 pagesTELEVISIÓN ANALÓGICA-Prof. Edgardo Faletti-2003Forumsur ArgentinaPas encore d'évaluation
- Tics en en Aula - SADOP-Lic. Edgardo Faletti (2013)Document12 pagesTics en en Aula - SADOP-Lic. Edgardo Faletti (2013)Forumsur ArgentinaPas encore d'évaluation
- Herramientas Básicas para Ensamble para PC-Lic Prof. Edgardo Faletti (2013)Document2 pagesHerramientas Básicas para Ensamble para PC-Lic Prof. Edgardo Faletti (2013)Forumsur ArgentinaPas encore d'évaluation
- Electrónica-Líneas de Transmisión - Lic. Prof Edgardo Faletti (2000)Document22 pagesElectrónica-Líneas de Transmisión - Lic. Prof Edgardo Faletti (2000)Forumsur ArgentinaPas encore d'évaluation
- Automatización-Tutorial Arduino (Digitalización Lic. E. Faletti-2013)Document8 pagesAutomatización-Tutorial Arduino (Digitalización Lic. E. Faletti-2013)Forumsur ArgentinaPas encore d'évaluation
- Innovacion Tecnológica - Prof. Edgardo Faletti-2003Document49 pagesInnovacion Tecnológica - Prof. Edgardo Faletti-2003Forumsur ArgentinaPas encore d'évaluation
- Planilla RNJ1Document3 pagesPlanilla RNJ1YaiArangoRodriguez100% (1)
- Anexo IiDocument3 pagesAnexo IiMaria Ines Ortiz de ZaratePas encore d'évaluation
- Cruz de Mayo SucreDocument3 pagesCruz de Mayo SucreNellyOrtuñoPas encore d'évaluation
- La Iglesia en ColombiaDocument2 pagesLa Iglesia en ColombiaPablo ReyesPas encore d'évaluation
- Los Tres AmigosDocument3 pagesLos Tres AmigosYAZMIN MEXICANOPas encore d'évaluation
- El Austral de Osorno 02122022Document20 pagesEl Austral de Osorno 02122022jljPas encore d'évaluation
- Lirica MayasaDocument20 pagesLirica MayasaCatalin ScarlatPas encore d'évaluation
- Ed. Fisica 5°-6° Exp. 10 - Fic Act 2Document1 pageEd. Fisica 5°-6° Exp. 10 - Fic Act 2hectorPas encore d'évaluation
- Manual Word 2016Document64 pagesManual Word 2016Julio RavazzaniPas encore d'évaluation
- Actividades Género LiricoDocument2 pagesActividades Género LiricoCony Tanza50% (2)
- Danzas de AyacuchoDocument6 pagesDanzas de AyacuchoDAVIDPas encore d'évaluation
- Tipos de MasaDocument18 pagesTipos de MasaIsabel CruzPas encore d'évaluation
- Animes Que Me Hicieron LlorarDocument10 pagesAnimes Que Me Hicieron LlorarSANDRA ISABEL LOPEZ VILLALOBOSPas encore d'évaluation
- Cuento - Luis y El Hueco en El ZapatoDocument2 pagesCuento - Luis y El Hueco en El ZapatoANDER YERAY FLORES TORREZPas encore d'évaluation
- Semana 4Document2 pagesSemana 4Miguel Angel Rozo Arango0% (2)
- Artes Expresion CorporalDocument8 pagesArtes Expresion Corporaltu3amigo3fielPas encore d'évaluation
- +) Circuito Del Sistema FRENOS VSCDocument19 pages+) Circuito Del Sistema FRENOS VSCguillebohlPas encore d'évaluation
- Catálogo EneroDocument46 pagesCatálogo EneroinsumostechnologyPas encore d'évaluation
- 1 4981122582490120475Document19 pages1 4981122582490120475cindy100% (1)
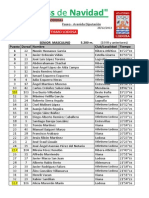
- Clasificación Absoluta Del XI Cross de Navidad de Lodosa 2013Document2 pagesClasificación Absoluta Del XI Cross de Navidad de Lodosa 2013Alvaro PerezPas encore d'évaluation
- 101 Cosas Que Le Enseñaré A Mi HijaDocument5 pages101 Cosas Que Le Enseñaré A Mi HijaRul MhonthavaPas encore d'évaluation
- Tpit Actividad Evaluable t1Document4 pagesTpit Actividad Evaluable t1Adri linkPas encore d'évaluation
- 02 DE SETIEMBRE Mis Sueños y Metas Son ImportantesDocument4 pages02 DE SETIEMBRE Mis Sueños y Metas Son ImportantesEdith CasPas encore d'évaluation
- Los Diptongos y Los HiatosDocument24 pagesLos Diptongos y Los HiatosFrancisco VelásquezPas encore d'évaluation
- Manual de Instalacion Wincc TIA PORTAL V13Document16 pagesManual de Instalacion Wincc TIA PORTAL V13adrian coronaPas encore d'évaluation
- E-Commerce Caso Practico U.1Document8 pagesE-Commerce Caso Practico U.1erickPas encore d'évaluation
- Coca HuiDocument3 pagesCoca HuiNilda BobadillaPas encore d'évaluation
- Ciencias 3Document6 pagesCiencias 3Francisco Elias Rivera Larios100% (2)
- 2 Compositores Mexicanos Del Siglo XIXDocument4 pages2 Compositores Mexicanos Del Siglo XIXjosephv22Pas encore d'évaluation