Académique Documents
Professionnel Documents
Culture Documents
Lava Final Report
Transféré par
Uma MaheshDescription originale:
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Lava Final Report
Transféré par
Uma MaheshDroits d'auteur :
Formats disponibles
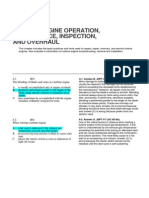
ANALYSIS OF GAS TURBINE ROTOR DISC
CHAPTER 1 INTRODUCTION
The gas turbine is a rotating internal combustion engine, which takes air from the atmosphere and compresses it to a higher pressure in an axial compressor (compressor section) and the compressed air flow into combustion chamber where fuel is admitted and ignited with the help of a sparkplug the products of combustion are used as a working fluid for developing power in the turbine section of the gas turbine. Generally heavy-duty alloy gas turbine is a bolted construction made up of forged compressor and turbine wheels, distance pieces (junction between compressor and turbine), spacers (between some of the turbine wheel) and stub shafts. For efficient functioning of gas turbine proper design of rotor is essential. The most critical components in the rotor are the turbine wheels (discs) because of combined conditions of elevated temperatures and requirements for strength and toughness. Further, unlike the aircraft gas turbine, these wheels (discs) are of very large diameter and section thickness. Gas turbine discs are mainly subjected to centrifugal stresses with high temperature gradients. In the present work the net effects of superposed thermal and structural stresses, and the effect of pre-stressing on stress distribution in the disc is investigated with the help of a finite element software ANSYS.
Department of Mechanical engineering (CAD/CAM)
Page 1
ANALYSIS OF GAS TURBINE ROTOR DISC
TYPES OF GAS TURBINES
1.1 JET ENGINES
Diagram of a gas turbine jet engine Air breathing jet engines are gas turbines optimized to produce thrust from the exhaust gases, or from ducted fans connected to the gas turbines. Jet engines that produce thrust primarily from the direct impulse of exhaust gases are often called turbojets, whereas those that generate most of their thrust from the action of a ducted fan are often called turbofans or (rarely) fan-jets. Gas turbines are also used in many liquid propellant rockets, the gas turbines are used to power a turbo pump to permit the use of lightweight, low pressure tanks, which saves considerable dry mass.
1.2 AERODERIVATIVE GAS TURBINES
Diagram of a high-pressure turbine blade
Department of Mechanical engineering (CAD/CAM)
Page 2
ANALYSIS OF GAS TURBINE ROTOR DISC
Aeroderivatives are also used in electrical power generation due to their ability to be shut down, and handle load changes more quickly than industrial machines. They are also used in the marine industry to reduce weight. The General Electric LM2500, General Electric LM6000, Rolls-Royce RB211 and Rolls-Royce Avon are common models of this type of machine.
1.3 AMATEUR GAS TURBINES
Increasing numbers of gas turbines are being used or even constructed by amateurs. In its most straightforward form, these are commercial turbines acquired through military surplus or scrapyard sales, then operated for display as part of the hobby of engine collecting. In its most extreme form, amateurs have even rebuilt engines beyond professional repair and then used them to compete for the Record. The simplest form of self-constructed gas turbine employs an automotive turbocharger as the core component. A combustion chamber is fabricated and plumbed between the compressor and turbine sections. More sophisticated turbojets are also built, where their thrust and light weight are sufficient to power large model aircraft. The Schreckling design constructs the entire engine from raw materials, including the fabrication of a centrifugal compressor wheel from plywood, epoxy and wrapped carbon fibre strands. Like many technology based hobbies, they tend to give rise to manufacturing businesses over time. Several small companies now manufacture small turbines and parts for the amateur. Most turbojet-powered model aircraft are now using these commercial and semi-commercial microturbines, rather than a Schreckling-like home-build. 1.3.1 Auxiliary power units APUs is small gas turbines designed for auxiliary power of larger machines, such as those inside an aircraft. They supply compressed air for aircraft ventilation (with an appropriate compressor design), start-up power for larger jet engines, and electrical and hydraulic power.
Department of Mechanical engineering (CAD/CAM)
Page 3
ANALYSIS OF GAS TURBINE ROTOR DISC
1.3.2 Industrial gas turbines for power generation
GE H series power generation gas turbine: in combined cycle configuration, this 480-megawatt unit has a rated thermal efficiency of 60%. Industrial gas turbines differ from aeroderivative in that the frames, bearings, and blading are of heavier construction. Industrial gas turbines range in size from truck-mounted mobile plants to enormous, complex systems They can be particularly efficientup to 60%when waste heat from the gas turbine is recovered by a heat recovery steam generator to power a conventional steam turbine in a combined cycle configuration. They can also be run in a cogeneration configuration: the exhaust is used for space or water heating, or drives an absorption chiller for cooling or refrigeration. Such engines require a dedicated enclosure, both to protect the engine from the elements and the operators from the noise. The construction process for gas turbines can take as little as several weeks to a few months, compared to years for plants. Their other main advantage is the ability to be turned on and off within minutes, supplying power during peak demand. Since single cycle (gas turbine only) power plants are less efficient than combined cycle plants, they are usually used as peaking power plants, which operate anywhere from several hours per day to a few dozen hours per year, depending on the electricity demand and the generating capacity of the region. In areas with a shortage of base load and load following power plant capacity or low fuel costs, a gas turbine power plant may regularly
Department of Mechanical engineering (CAD/CAM)
Page 4
ANALYSIS OF GAS TURBINE ROTOR DISC
operate during most hours of the day. A large single cycle gas turbine typically produces 100 to 400 megawatts of power and has 3540% thermal efficiency. 1.3.3 Compressed air energy storage One modern development seeks to improve efficiency in another way, by separating the compressor and the turbine with a compressed air store. In a conventional turbine, up to half the generated power is used driving the compressor. In a compressed air energy storage configuration, power, perhaps from a wind farm or bought on the open market at a time of low demand and low price, is used to drive the compressor, and the compressed air released to operate the turbine when required. 1.3 .4 Turbo shaft engines Turbo shaft engines are often used to drive compression trains (for example in gas pumping stations or natural gas liquefaction plants) and are used to power almost all modern helicopters. The first shaft bears the compressor and the high speed turbine (often referred to as "Gas Generator" or "Ng"), while the second shaft bears the low speed turbine (or "Power Turbine" or "Nf" - the 'f' stands for 'free wheeling turbine' on helicopters specifically due to the fact that the gas generator turbine spins separately from the power turbine). This arrangement is used to increase speed and power output flexibility.
1.4 RADIAL GAS TURBINES
In 1963, Jan Mowill initiated the development at Kongsberg Vpenfabrikk in Norway. Various successors have made good progress in the refinement of this mechanism. Owing to a configuration that keeps heat away from certain bearings the durability of the machine is improved while the radial turbine is well matched in speed requirement. 1.5 SCALE JET ENGINE Scale jet engines are scaled down versions of this early full scale engine. Also known as miniature gas turbines or micro-jets. With this in mind the pioneer of modern Micro-Jets, Kurt Schreckling, produced one of the world's first Micro-Turbines, the Department of Mechanical engineering (CAD/CAM) Page 5
ANALYSIS OF GAS TURBINE ROTOR DISC
FD3/67. This engine can produce up to 22 Newtons of thrust, and can be built by most mechanically minded people with basic engineering tools, such as a metal lathe. 1.5.1 Microturbines Also known as:
Turbo alternators MicroTurbine Turbogenerator
Microturbines are becoming widespread for distributed power and combined heat and power applications. They are one of the most promising technologies for powering hybrid electric vehicles. They range from hand held units producing less than a kilowatt, to commercial sized systems that produce tens or hundreds of kilowatts. Basic principles of microturbine are based on micro combustion. Part of their success is due to advances in electronics, which allows unattended operation and interfacing with the commercial power grid. Electronic power switching technology eliminates the need for the generator to be synchronized with the power grid. This allows the generator to be integrated with the turbine shaft, and to double as the starter motor. Microturbine systems have many advantages over reciprocating
engine generators, such as higher power-to-weight ratio, low emissions and few, or just one, moving part. Advantages are that microturbines may be designed with foil bearings and air-cooling operating without lubricating oil, coolants or other hazardous materials. Microturbines also have a further advantage of having the majority of the waste heat contained in the relatively high temperature exhaust making it simpler to capture, whereas the waste heat of reciprocating engines is split between its exhaust and cooling system. However, reciprocating engine generators are quicker to respond to changes in output power requirement and are usually slightly more efficient, although the efficiency Department of Mechanical engineering (CAD/CAM) Page 6
ANALYSIS OF GAS TURBINE ROTOR DISC
of microturbines is increasing. Microturbines also lose more efficiency at low power levels than reciprocating engines. When used in extended range electric vehicles the static efficiency drawback is irrelevant, since the gas turbine can be run at or near maximum power, driving an alternator to produce electricity either for the wheel motors, or for the batteries, as appropriate to speed and battery state. The batteries act as a "buffer" (energy storage) in delivering the required amount of power to the wheel motors, rendering throttle response of the GT completely irrelevant. There is, moreover, no need for a significant or variablespeed gearbox; turning an alternator at comparatively high speeds allows for a smaller and lighter alternator than would otherwise be the case. The superior power-to-weight ratio of the gas turbine and its fixed speed gearbox, allows for a much lighter prime mover than those in such hybrids as the Toyota Prius (which utilised a 1.8 litre petrol engine) or the Chevrolet Volt (which utilises a 1.4 litre petrol engine). This in turn allows a heavier weight of batteries to be carried. The weight can be made up of more batteries, which allows for a longer electric-only range. Alternatively, the vehicle can use heavier types of batteries such as lead acid batteries (which are cheaper to buy) or safer types of batteries such as Lithium-Iron-Phosphate. When gas turbines are used in extended-range electric vehicles, like those planned by Land-Rover/Range-Rover in conjunction with Bladon, or by Jaguar also in partnership with Bladon, the very poor throttling response (their high moment of rotational inertia) does not matter, because the gas turbine, which may be spinning at 100,000 rpm, is not directly, mechanically connected to the wheels. It was this poor throttling response that so bedevilled the 1960 Rover gas turbine-powered prototype motor car, which did not have the advantage of an intermediate electric drive train. Gas turbines accept most commercial well fuels, such as gasoline, natural fuels such
gas, propane, diesel,
and kerosene as
as renewable
as E85, biodiesel and biogas. However, when running on kerosene or diesel, they will typically be unable to start without the assistance of a more volatile product, such as propane gas. Department of Mechanical engineering (CAD/CAM) Page 7
ANALYSIS OF GAS TURBINE ROTOR DISC
Microturbine designs usually consist of a single stage radial compressor, a single stage radial turbine and a recuperator. Recuperators are difficult to design and manufacture because they operate under high pressure and temperature differentials. Exhaust heat can be used for water heating, space heating, drying processes or absorption chillers, which create cold for air conditioning from heat energy instead of electric energy. Typical microturbine efficiencies are 25 to 35%. When in a combined heat and power cogeneration system, efficiencies of greater than 80% are commonly achieved. MIT started its millimeter size turbine engine project in the middle of the 1990s when Professor of Aeronautics and Astronautics Alan H. Epstein considered the possibility of creating a personal turbine which will be able to meet all the demands of a modern person's electrical needs, just as a large turbine can meet the electricity demands of a small city. Problems have occurred with heat dissipation and high-speed bearing in these new microturbines. Moreover, their expected efficiency is a very low 5-6%. According to Professor Epstein, current commercial Li-ion rechargeable batteries deliver about 120150 Wh/kg. MIT's millimeter size turbine will deliver 500-700 Wh/kg in the near term, rising to 1200-1500 Wh/kg in the longer term.
1.6 Literature review
Although the name of the finite element method is given recently, the concept has been used several centuries back. For, example ancient mathematics found the circumstances of circle by approximated it as a polygon. In terms of the present day notation each side of the polygon can be called a finite element. By considering the approximating polygon inscribed or circumscribed, one can obtain a lower bound or an upper bound for the true circumference. Further, as the number of the sides of the polygon is increased, the approximate values converge to the true value. These characteristics will hold true in any general finite element application. In recent times R. Courant first suggested an approach similar to the finite element method, involving the Department of Mechanical engineering (CAD/CAM) Page 8
ANALYSIS OF GAS TURBINE ROTOR DISC
use of piece wise continuous functions defined over triangular regions, in 1943 in the literature of applied mathematics. M.J. Tumer, R.W, today has presented the finite element method as known in 1956 by M.J. Tumer, R.W.Clough, H.C. Martin and L.J. Troop. This paper presents the application of simple finite elements (pin-jointed bar and triangular plate with in plane loads) for the analysis of aircraft structure and is considered as one of the key contributions in the development of the finite element method. The digital computer provides a rapid means of performing the many calculations involved in the finite element analysis and made the method practically viable. Along with the development of high-speed digital computers, the application of the finite element method progressed at very impressed rate. The books by Prsemienecki and Zienkiewicz and Hoister presented finite element method as applied to the solutions of stress analysis problems. The book by Zienkiwicz and Cheung The finite element method in structural and continuum mechanics, (McGraw Hill, London, 1971) presented the broad interpretation of the finite element method, and its applicability to any general field problem. With this broad interpretation of the finite element method, it has been found that the finite element equation also derived by using a weighted residual method or least square method. This led to wide spread interest among applied mathematicians in applying the finite element method for the solution of linear differential equations. Over the years several papers, conference proceedings and books have been published on this subject. With all this progress, today engineers and scientists consider the finite element method as one of the well established and convenient analyses tools.
Department of Mechanical engineering (CAD/CAM)
Page 9
ANALYSIS OF GAS TURBINE ROTOR DISC
CHAPTER 2 GAS TURBINE 2.1 PRINCIPLE OF GAS TURBINE
The gas turbine is a rotating internal combustion engine, which takes air from the atmosphere and compresses it to a higher pressure in an axial compressor (compressor section) and the compressed air flow into combustion chamber where fuel is admitted and ignited with the help of a sparkplug the products are used as a working fluid for developing power in the turbine section of the gas turbine.
Fig 2.1 structure of gas turbine 2.2 BASIC THERMO DYNAMIC PRINCIPLES OF GAS TURBINE OPERATION A schematic diagram for a single shaft, simple cycle gas turbine is shown in figure 3. Air enters at a point of 1 in schematic at ambient conditions. Since it vary from day to day from location to location, it is necessary to consider some standard conditions.
Department of Mechanical engineering (CAD/CAM)
Page 10
ANALYSIS OF GAS TURBINE ROTOR DISC
The standard conditions used by industry are ISO conditions of 14.7psi and 60% of relative humidity. The air is compressed to some higher pressure in the compressor no heat is added; how ever, the temperature of the air rises because of the compression, so that the air at the discharge of the axial flow compressor has both its temperature and pressure increased. Upon leaving the compressor, the air enters the combustion system at point 2, where fuel is injected and combustion takes place. The combustion process occurs essentially at constant pressure, although very high local temperatures are reached with in the primary combustion zone (approaching stoichiometric conditions), the combustion system is designed to provide mixing, dilution and cooling. Thus by the time the combustion mixture leaves the combustion system and enters the turbine at point 3, it is at some mixed average temperature. In the turbine section of the gas turbine, the energy of the hot gases is converted into work. This conversion actually takes into two steps. In the nozzle section of the turbine, the hot gases are expanded and thus a portion of the thermal energy is converted into kinetic energy. In the subsequent bucket section of the turbine, a portion of the
Fig 2.2 Gas Turbine Engine Position.
Department of Mechanical engineering (CAD/CAM)
Page 11
ANALYSIS OF GAS TURBINE ROTOR DISC
Kinetic energy is transferred to the rotating buckets and is converted into the work. Some of the work developed by the turbine is used to drive the compressor and the remainder is available for useful work at the output Flange of the gas turbine, typically more than 50% of the work developed by the turbine section is used to power the axial compressor.
2.3 THE BRAYTON CYCLE
The thermodynamic cycle upon which all gas turbines operate is called the brayton cycle. Figure 2.1 shows the classical pressure-volume (p-v) diagram and temperature- entropy (T-S) diagrams for this cycle. Path 1 to 2 represents the compression that takes place in the compressor, path 2 to 3 represents the constant pressure addition of heat in the combustion section, and path 3 to 4 represents the expansion that takes place in the turbine.
Fig 2.3 Brayton Cycle
The path from 4 back to 1 on the cycle diagrams is indicative of a constant pressure cooling process taking place. In the gas turbine this cooling is taken care by the atmosphere, which provides fresh cool air at point 1 on a continuous basis in exchange Department of Mechanical engineering (CAD/CAM) Page 12
ANALYSIS OF GAS TURBINE ROTOR DISC
for hot gases exhausted to the atmosphere at a point 4. The actual cycle is an open rather than closed cycle as indicated. Brayton cycle can be characterized by two very significant parameters: i. Pressure ratio ii. Firing temperatur
2.3.1 Pressure Ratio
The pressure ratio of the cycle is the pressure at point 2 (compressor discharge pressure). In an ideal cycle this pressure ratio is also equal to the pressure at point 3 divided by the pressure at point 4. How ever in actual cycle there is some slight pressure losses in the combustion system and hence the pressure at point 3 is slightly less than at point 2. 2.3.2 Firing Temperature The firing temperature is the highest temperature reached in the cycle. As per company definition firing temperatures as the mass-flow mean total temperature at the first stage nozzle trailing edge plane. In gas turbines without first stage turbine nozzle cooling (in which air enters the hot gas stream after cooling the nozzle) the total temperature immediately down stream of the nozzle would be the same as the temperature immediately up stream of the nozzle. With turbine nozzle cooling, this cooling air mixes with the hot gases expanding through the nozzle and thus tends to reduce the total temperature existing in the nozzle. From this definition this temperature is the indicative of the point 3 in the cycle. The pressure ratio resulting in maximum out put and maximum efficiency changes with firing temperature, and the higher the pressure ratio, the greater the advantage obtained from increased firing temperature.
2.4 THE COMPONENTS OF A GAS TURBINE
The major components of a gas turbine are the compressor, combustion system and turbine section. These are dealt in detail in following sections: 2.4.1 Compressor The gas turbine compressor is an axial flow design of sub sonic type that efficiently compresses a large volume of air. The compressor consists of many individual Department of Mechanical engineering (CAD/CAM) Page 13
ANALYSIS OF GAS TURBINE ROTOR DISC
stages operating in series. Each compressor stage consist of a rotating row of blades (air foil), that increases the velocity of the incoming air there by increasing its kinetic energy, followed by a stationary row of blades that acts as a diffusers, converting kinetic energy to pressure increase. The number of stages used for a particular gas turbine compressor depends upon the design pressure ratio of the turbine. Typical pressure ratio changes from 6:1 to 14.9:1. At the compressor inlet there is a row of stationary blades, called inlet guide vanes (IGVS) that direct the incoming air on to the first rotating stage in a smooth way. In some compressor the flow angle of the IGVs can be changed to control the volume of air being drawn into the compressor. The variable inlet guide vanes (VIGVs) are used to ensure aerodynamically smooth operating compressor through out a large operating range. At the compressor discharged, there are several rows of stationary diffuser blades and a cone shaped diffuser to obtain maximum pressure raise before the air goes into the combustion system. 2.4.2 Combustion System The combustion system consists of several liners into which fuel is added and brunt with a portion of compressed air. The excess compressed air is used to limit the temperature level usable by the turbine. The individual liners are connected to the turbine section by transition places. Fuel is injected into each liner by fuel nozzles that atomize the fuel for effective burning. Electric igniters ignite the fuel initially. Once the fire is started, the combustion process is self-sustaining as long as the fuel and air are available. 2.4.3 Turbine Section The turbine consists of a several stages. Each stage comprises of stationary row of nozzles where, the velocity of the high energy gases is increased and directed towards a rotating row of buckets (air foils) attached to the turbine shaft. The high velocity gases impinge on the buckets, converting the kinetic energy of the gas into shaft power. Varying the amount of fuel injected into the combustion chamber changes the energy from the combustion system available to drive the turbine.
Department of Mechanical engineering (CAD/CAM)
Page 14
ANALYSIS OF GAS TURBINE ROTOR DISC
2.5 GAS TURBINE ROTOR
The gas turbine rotors basically have two major parts:
1) Compressor Part, which is commonly called as compressor rotor. This part is
made out of individually bladed compressor wheels, which are assembled together with tie bolts. It may be noted that these compressor wheels are not mounted on a shaft (like mounting impellers on centrifugal compressor shaft), but are held together by radially positioning them by press fit (called rabit) near their bore and axially keeping them compressed by the tie-bolts (18 nos) running all along the full length of compressor rotor.
2) Turbine Part, which is commonly called as turbine rotor. The turbine rotor is
made out of distance piece, and turbine wheels (discs), which are assembled (bolted) together. The above two parts i.e. the compressor rotor and the turbine rotors are bolted together to form the gas turbine rotor, which is also known as unit rotor. A gas turbine rotor generally has the following characteristics: 1) Long life and need little maintenance. 2) No site balancing required. 3) Built up construction so that the damaged parts can be replaced. 4) Highest possible safety factors. 5) Easy approach to various parts of inspection. In particular the disc type built-up rotors have the following advantages: 1) Reduced size of the forgings which allows exploiting the best properties of the material. 2) Possibility of designing the discs with uniform strength offering the advantage of low stresses. 3) Easy replacement of buckets in case of damage. 4) Possibility of pre-stressing the disc by creating plastic strains at the bore by spinning at high speed.
Department of Mechanical engineering (CAD/CAM)
Page 15
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 2.4 gas turbine rotor disc 2.5.1 Critical Issue Related To the Design of the Gas Turbine Rotor Disc
Department of Mechanical engineering (CAD/CAM)
Page 16
ANALYSIS OF GAS TURBINE ROTOR DISC
As discussed in the earlier section the gas turbine rotor disc is one of the critical components of gas turbine rotor because of large diameter and section thickness and also subjected to high temperature gradients. In summary, the following are the forces acting on the rotor disc. 1) Centrifugal stresses due to its own rotating mass. 2) Centrifugal stresses due to the mass of the blades mounted on the wheel (disc) 3) The thermal stresses due to the temperature gradients induced during the operation. 4) Stresses due to the rotor vibration. In the present work only 1 and 3 types of forces are considered for the stress analysis of the disc. As the rotor rotates at a high speed, the stresses at the bore become critical, as the disc diameter is large. This is the source for centrifugal stresses developed in the disc.The compressor rotor is subjected to lower temperature and hence relatively less critical and the turbine rotor is exposed to the hot combustion gases and hence more critical in the view of thermal stresses. 2.5.2 Turbine Wheel Processes Each turbine wheel (disc) is spin tested prior to its installation into a rotor. Alloy steel wheels, because of the brittle-to-ductile transition phenomena, are first spun cold to verify the absence of critical size defects. All wheels, including cold spun steel wheels, are hot spun at bore stresses slightly above their yield strength. To induce residual compressive stresses in the bore region these spinning operations, in addition to the stringent, non-destructive testing performed both before and after spin testing provides maximum assurance against brittle fracture in service. 2.5.3 Turbine Rotor Disc Materials Material selection for these critical rotating applications is dictated by the operating temperatures and by physical and mechanical property requirements. Including high proof strength, tensile ductility, low creep extension, fracture toughness, resistance to crack propagation and high and low cycle fatigue strength. Comparing candidate disc materials, titanium and its alloy are the strongest available but offer poor oxidation Department of Mechanical engineering (CAD/CAM) Page 17
ANALYSIS OF GAS TURBINE ROTOR DISC
resistance above 900degF, and are the most expensive. The Ni-Cr-Fe alloys (WASPLAY, INCONEL ALLOY 718 AND NIMONIC ALLOY 901) offer the most cost effective range of selection for aircraft engines. Steels are cheaper and are used where power to weight ratios are less important, such as in heavy duty land based engines, even in that market, the trend is to the high performance nickel base alloy, INCONEL ALLOY 706 and INCONEL ALLOY 718. In the present work the turbine rotor disc is made up of B50A368 (HY 19467). The composition of the disc is as follows: 1) carbon 0.2 to 0.3% 2) chromium 0.35 to 1.25% 3) molybdenum 1.0 to 1.5% 4) Vanadium 0.2% The yield strength of the material at 0.2% yield = 130N/mm2
CHAPTER 3 ANALYSIS OF GAS TURBINE ROTOR DISC 3.1 PROBLEM DESCRIPTION
The gas turbine rotor consists of individual discs, stub shafts and distance pieces stacked and bolted together. As the disc diameter is large and speeds are high and the centrifugal stresses are high. The gas turbine discs are normally operated at such high temperatures that the materials used are at low strength levels. The hot gas contacts the blades and rim of the turbine rotor and thus maintains the rim at high temperatures. Various cooling methods have been used to reduce the temperature of the disc but as the rim is always in contact with hot gases it remains at high temperature whereas cooling decrease the temperature of the central portion of the rotor and thus increase the temperature gradients. These temperature gradient gradients are the source for the thermal stresses that causes the Department of Mechanical engineering (CAD/CAM) Page 18
ANALYSIS OF GAS TURBINE ROTOR DISC
thermal stress distribution in the gas turbine disc to differ widely from those encountered in the steam turbines which are mainly subjected to centrifugal stresses with small temperature gradients. Thus in actual working conditions both these structural as well as thermal stress are combined acting on the gas turbine rotor disc. If these stresses exceed the threshold limit of the gas turbine it will cause disc failure.
3.2 PRESENT WORK
The first and foremost task in the present work is the collection of data and drawings of the gas turbine rotor disc and boundary conditions of the disc to be inputted are collected and heat transfer coefficients on the disc surface etc., As the shape of the gas turbine rotor disc is not simple it is difficult to calculate the stresses and temperatures of gas turbine rotor disc using analytical methods. Hence ANSYS a finite element package is used to calculate the temperatures and stresses. The solution process for finding the resultant stresses which are developed due to both temperature gradients and structural loads involves two steps. The output of first solution contains the information about the temperature distribution among all the nodes of model which is solved by thermal analysis module of ANSYS and can be viewed by using post processor phase of the ANSYS. The output of first solution is given as input in the form of .RTH file and the inertia load for stress analysis of gas turbine rotor disc to calculate the resultant stresses using structural analysis module. The cross sectional view of the gas turbine rotor disc which is considered for the analysis is shown in the figure. The basic data has been collected from different sources and geometry is drafted based on the dimensions available in the drawings. The geometry is then meshed property to divide it into elements and nodes using proper element type. In this work we are using PLANE 77 element. After meshing the model boundary conditions are applied on the disc. After applying all boundary conditions the model is solved by using solution process. The following are the assumption is made in this project Department of Mechanical engineering (CAD/CAM) Page 19
ANALYSIS OF GAS TURBINE ROTOR DISC
Steady state flow analysis
3.4 BOUNDARY CONDITIONS
Convection = 0.004 W/m2.K Reference temperature = 30 0C Boundary temperatures = 700,1000C
3.5 INPUT DATA USED FOR ANALYSIS
FOR MATERIAL B50A368 Density of material Youngs modulus Poissons ratio Specific heat Operating speed Bulk temperature = 7.85x10 -9 kg/mm3 = 2x105 MPa = 0.3 = 1000 J/kg.K = 450 radians/s = 350C = 12x10-6
Thermal conductivity = 0.036 W/mm.K
Thermal expansion Coefficient FOR MATERIAL 1IN718 Density of material Youngs modulus Poissons ratio Specific heat Operating speed Bulk temperature
= 8.19 x10 -9 kg/mm3 = 1.7 x105 MPa = 0.3 = 435 J/kg.K = 450 radians/s = 350C = 14 x10-6
Thermal conductivity = 0.0114 W/mm.K
Thermal expansion Coefficient
3.6 PROCEDURE FOR ANALYSIS
Our analysis procedure starts by setting the preferences to structural and thermal and defining the element type and consider it as an axisymmetric model. Define the material properties for the materials we are using. As our analysis is a coupled-field Department of Mechanical engineering (CAD/CAM) Page 20
ANALYSIS OF GAS TURBINE ROTOR DISC
analysis we set the physics environment to both thermal and structural and define loads in both the environments. The final step in the procedure is solving the model and viewing the results in post processor through contour plots and list results. PREFERENCES > STRUCTURAL, THERMAL PREPROCESSOR > ELEMENT TYPE > ADD/EDIT/DELETE > ADD > THERMAL MASS > SOLID > 8node 77 > OPTIONS > ELEMENT BEHAVIOUR > AXISYMMETRIC MATERIAL PROPERTIES > MATERIAL MODELS > THERMAL > THERMAL CONDUCTIVITY > SPECIFIC HEAT MODELLING > CREATE > KEY POINTS > AREAS
Department of Mechanical engineering (CAD/CAM)
Page 21
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 3.1: 2D Component of Gas Turbine Rotor Disc MESHING > MESH > AREAS > FREE MESH PHYSICS > ENVIRONMENT > WRITE > TITLE > THERM > CLEAR > OK ELEMENT TYPE > SWITCH TO ELEMENT TYPE > THERMAL TO STRUCT> ELEMENT TYPE > ADD/EDIT/DELETE OPTIONS > AXISYMMETRIC >
MATERIAL PROPERTIES > MATERIAL MODELS > STRUCTURAL > LINEAR > ELASTIC > ISOTROPIC > YOUNGS MODULUS > POISSIONS RATIO DENSITY THERMAL EXPANSION > SECANT COEFFICIENT PHYSICS > ENVIRONMENT > WRITE > STRUCT READ > THERM Department of Mechanical engineering (CAD/CAM) Page 22
ANALYSIS OF GAS TURBINE ROTOR DISC
LOADS > DEFINE LOADS > APPLY > THERMAL > TEMPERATURE > ON NODES CONVECTION > ON LINES > COVNECTION COEFFICIENT > BULK TEMPERATURE SETTINGS > REFERENCE TEMPERATURE PHYSICS > ENVIRONMENT > READ > STRUCT LOADS > DEFINE LOADS > APPLY > STRUCTURAL > DISPLACEMENT > ON NODES INERTIA > ANGULAR VELOCITY > GLOBAL FINISH SOLUTION > SOLVE > CURRENT LS GENERAL POST PROCESSOR > PLOT RESULTS > CONTOUR PLOT > NODAL SOLUTION LIST RESULTS > NODAL SOLUTION
FIG. 3.2 Meshed Component
Figure 3.2 is the meshed component of the gas turbine rotor disc. Department of Mechanical engineering (CAD/CAM) Page 23
ANALYSIS OF GAS TURBINE ROTOR DISC
FIG. 3.3 Loads on FE model
Department of Mechanical engineering (CAD/CAM)
Page 24
ANALYSIS OF GAS TURBINE ROTOR DISC
CHAPTER 4 FINITE ELEMENT METHOD
The basic idea in the finite element method is to find out the solution of a complicated problem by replacing it by a simpler one. Since a simple one in finding the solution replaces the actual problem, we will be able to find only approximate solution rather than the exact solution. More over, in the finite element method, it will often be possible to improve or refine the approximate solution by spending more computational effort. This is a numerical procedure for obtaining solution to many of the problems encountered in engineering analysis. In the finite element method, the solution region is considered as build up of many small inter connected sub regions called finite elements. As an example consider the milling machine structure, it is very difficult to find the exact response (like stresses and displacements) of the machine under any specified cutting conditions. This structure is approximated as composed of several pieces in the finite element method. In each piece or element, a convenient approximate solution is assumed and the conditions of over all equilibrium of the structure are derived. The satisfaction of these conditions will yield an approximate solution for the displacements and stresses. The finite element method may be divided into two phases. The first phase consists of the study of the individual element. The second phase is the study of the assemblage of elements representing the entire body.
4.1 ENGINEERING APPLICATION OF FEM
As stated earlier, the finite element method was developed originally for the analysis of aircraft structures. However, the general nature of its theory makes it applicable to wide variety of boundary value problems in engineering. A boundary value problem is one in which a solution is sought in the domain (or region) of a body subjected to the satisfaction of prescribed boundary (edge) condition on the dependent variable or their derivatives. Mostly all engineering problems of the finite element, method comes under three categories of boundary value problems, namely Department of Mechanical engineering (CAD/CAM) Page 25
ANALYSIS OF GAS TURBINE ROTOR DISC
1) Equilibrium or steady state or time independent problem. 2) Eigen value problem, and 3) Transient or propagation problems. In an equilibrium problem, we need to find the steady state displacement or stress distribution if it is a solid mechanics problem temperature or heat flux distribution if it a heat transfer problem and pressure or velocity distribution if it is a fluid mechanics problem and mode shape. In fluid mechanics problem, we have to find stability of laminar flow and resonance characteristics if it is a electrical problem. The transient or propagation problems are time dependent problems. This type of problems arises, for example, whenever we are interested in the area of solid mechanics and under sudden heating or cooling in the field or heat transfer.
4.2 GENERAL DESCRIPTION OF THE FINITE ELEMENT METHOD
In the finite element method, the actual continuum or body of matter like solid, liquid or gas is represented as an assemblage of subdivisions called finite elements. These elements are considered to be interconnected at specified joints, which are called nodes or nodal points. The nodes usually lie on the element boundaries where adjacent elements are consider to be connected. Since the actual variation of the field variable (like displacements, stress, temperature, pressure and velocity) inside the continuum is not known. We assume that the variation of the field variable inside a finite element can be approximated by a simple function. These approximating functions (also called interpolation models) are defined in terms of the values at the nodes. When field equation (like equilibrium equations) for whole continuum are written, the new unknown will be the nodal values of the field variable these approximating functions (also called interpolation models) are defined in terms of the values at the nodes. When field equation (like equilibrium equations) for whole continuum is written, the new unknown will be the nodal values of the field variable will be known. Once, these are known the approximating function define the field variable through out the assemblage of elements.
Department of Mechanical engineering (CAD/CAM)
Page 26
ANALYSIS OF GAS TURBINE ROTOR DISC
The solution of a general continuum by the finite element method always follows an orderly step-by step process. The step-by-step procedure for static structural problem can be stated structural problem can be stated as follows:
Step 1: Discretization Of Structure (Domain)
The first step in the finite element method is to divide the structure or solution region into sub divisions or elements.
Step 2: Selection of a Proper Interpolation Model
Since the displacement (field variable) solution of a complex structure under any specified load conditions cannot be predicted exactly, we assume some suitable solution with in an element to approximate the unknown solution. The assumed solution must be simple from computation point of view, and it should satisfy certain convergence requirements.
Step 3: Derivation of Element Stiffness Matrices (Characteristic Matrices) And Load Vectors
From assumed displacement model the stiffness matrix [k (e)] and load vector p (e) of element e are to be derived by using either equilibrium conditions or a suitable variation principle.
Step 4: Assemblage of Element Equations to Obtain the Overall Equilibrium Equations
Since the structure is composed of several finite elements, the individual element stiffness matrices and load vectors are to be assembled in a suitable manner and the over all equilibrium equation have to be formulated as [k]=P Where, [k] is called assembled stiffness matrix, is called vector of nodal displacements and p is the vector of nodal forces for the complete structure.
Step 5: Solution of System Equations to Find Nodal Values Of The Displacements (Field Variables)
Department of Mechanical engineering (CAD/CAM)
Page 27
ANALYSIS OF GAS TURBINE ROTOR DISC
The over all equilibrium equations have to be modified to account for the boundary conditions of the problem. After the incorporation of the boundary conditions, the equilibrium equations can be expressed as, [k]=P For linear problems, the solution has to be obtained in a sequence of steps, each step involving the modification of the stiffness matrix [k] and / or the load vector p.
Step 6: Computation of Element Strains and Stresses
Form the known nodal displacements , if required, the element strains and stresses can be computed by using the necessary equations of solid or structural mechanics. In the above steps the words indicated in the brackets implements for the general FEM step-by-step procedure.
4.3 EXPLANATION OF FEM STEP-BY-STEP
The steps involved in finite element analysis are stated in previous section. General explanation for each step of the step-by-step procedure of FEM is given in the following pages. 4.3.1 Discretization of the Domain The discretization of the domain or solution region into sub regions (finite elements) is the first in the finite element method. This is equivalent to replacing the domain having finite number of degrees of freedom by a system having finite number of degrees of freedom. The process of discretization is essentially an exercise of engineering judgment. The shapes, size, number and configuration of the elements have to be chosen carefully such that the original body or domain is simulated as closely as possible without increasing the computational effort needed for the solution. 4.3.1.1 Basic Element Shapes For any given physical body we have to use engineering judgment in selecting appropriate elements for discretization. Mostly the choice of the type of element is
Department of Mechanical engineering (CAD/CAM)
Page 28
ANALYSIS OF GAS TURBINE ROTOR DISC
indicated by the geometry of the body and the number of independent spatial co-ordinates necessary to describe the system. Some of popularly used one, two and three-dimensional elements are shown in figures 1 to 3 respectively. When the geometry, material properties and other parameters (like stress, displacements, pressure and temperature) can be described in terms of only one spatial co-ordinate, we can use one-dimensional element shown in fig 1. Although this element has a cross sectional area it is generally schematically as a line segment. Using this type of elements the cross sectional area along the length may be varied. When the configuration and the details of the problem can be described in terms of two independent spatial co-ordinates, we can use the two-dimensional elements as shown in fig 2. The basic element useful for two-dimensional analysis is the triangular element. Although a quadrilateral or its spatial forms, rectangular and parallelogram elements can be obtained by assembling two or four triangular elements, in some cases the use of quadrilateral elements prove to be advantageous. If three spatial can describe the geometry, material properties and other parameters of the body co-ordinates, we can idealize the body by using the threedimensional elements as shown in fig 3. The basic three-dimensional element, analogous to the triangular elements in the case of two dimensional problems, is the tetrahedron element. Some problems, which are actually three-dimensional, can be described by only one or two independent co-ordinates. Such problems can be idealized by using axisymmetric or ring type elements. The problems that posses axial symmetry likes pistons, storage tanks, valves, rocket nozzles and re-entry vehicle shield fall into this category. The present problem gas turbine rotor disc comes into this category. So in this problem the assumed element for descretization of problems involving curved geometry, finite elements with curved sides are useful. The ability to model A curved boundary has been made possible by the addition of middle nodes. Finite elements with straight lines are known as linear elements, while those with curved sides are called high order elements.
Department of Mechanical engineering (CAD/CAM)
Page 29
ANALYSIS OF GAS TURBINE ROTOR DISC
4.3.1.2 Types of Elements Often the type of elements to be used is evident from the physical problem itself. For example, if the problem involves the analysis of a truss structure under a given set of load conditions, the type of elements to be used for idealization is obviously the bar or line elements. How ever, in some cases the type of elements to be used for idealization may not be apparent and in such cases one has to choose the type of elements judicially. In certain problems, the given body cannot be represented as an assemblage of only one type of elements. In such cases, we may have to use two or more types of elements of idealization. 4.3.1.3 Sizes of Elements The size of elements influences the convergence of the solution directly and hence it has been chosen with care. If the size of the element is small, the final solution is expected to be more accurate. However we have to remember that the use of smaller size will also mean more computational time. Some times, we may have to use elements of different sizes in the same body. The size of element has to be varying small near the regions where stress concentration is expected compare to far away places. In general, wherever steep gradient of the field variable is expected, we have to use a finer mesh in that region. Another characteristic related to the size of elements that affects the finite element solution is the Aspect ratio of the elements. The aspect ratio describes the shape of the element in the assemblage of elements. For two-dimensional elements aspect ratio is taken as the ratio of the largest dimension of the element to the smallest dimension. An element with an aspect ratio of nearly generally yields best results. 4.3.1.4 Location of Nodes If the body has no abrupt change in geometry, material properties and external conditions (like load, temperature etc.,) the body can be divided into equal sub divisions and hence the spacing of the nodes can be uniform. On the other hand, if there are any discontinuities. 4.3.1.5 Number of Elements The number of elements to be chosen for idealization is related to the accuracy desired, size of elements and the number of degrees of freedom involved. Although an Department of Mechanical engineering (CAD/CAM) Page 30
ANALYSIS OF GAS TURBINE ROTOR DISC
increase in number of elements generally means more accurate results, for any given problem, there will be certain number of elements beyond which the accuracy cannot be improved by any significant amount. The behavior is shown graphically in fig4. After the number of elements reaches the point shown in figure no significant improvement will be found. Moreover, since the use of large number of elements involves large number of degrees of freedom, we may not be able to store the resulting matrices in the available computer memory. 4.3.1.6 Simplification Offered By the Physical Configuration Of The Body If the configurations of the body as well as the external conditions are symmetric, we may consider only half of the body for finite element idealization. The symmetry conditions however have to be incorporated in the solution procedure. 4.3.1.7 Node Numbering Scheme The finite element analysis of a practical problem often reduces to matrix equations in which matrices involved will be banded. The advantages in the finite element analysis of large practical systems have been made possible largely due to the banded nature of the matrices. Further, since most of the matrices involved (like stiffness matrices) are symmetric, the demands on the computer storage can be substantially reduced by storing only the elements involved in half band width instead of storing the whole matrix. The bandwidth of the final systems of algebraic equations, depend upon the size of the stiffness matrix of the individual elements and upon the system of notation for the nodes. If we can minimize the bandwidth, we have effectively minimized both the solution time and the storage requirement for the overall stiffness matrix. There are two steps that we can take to achieve this minimization. First if the higher order models are necessary in our analysis, we should avoid, if possible, the use of many secondary external nodes. Second, we can perform a symmetric sub division and adopt an appropriate numbering system for the nodes. If the nodes numbers are used as the basis for numbering the nodal displacements, then the bandwidth of the overall stiffness matrix depends upon the largest difference between any two external nods numbering for a single element. The bandwidth B is given by the following equation. B= (D+1)*F Department of Mechanical engineering (CAD/CAM) Page 31
ANALYSIS OF GAS TURBINE ROTOR DISC
Where, D= maximum largest difference occurring for the assemblage F= the number of degrees of freedom Hence to minimize the bandwidth, the nodal numbering should be selected to minimize D. As an example, consider the different node numbering system for the nodes of a simple rectangular mesh shown in fig5a, the D for the above node scheme is 8. Take third element the maximum difference between the node number obtained is 8 (i.e. 11-3=8) and let the degrees of freedom for node are 2. B= (8+1)*2 = 18 In the same way in fig 2b the d for the node scheme is 5 B= (5+1)*2 =12 So the bandwidth in the second scheme is less than the first scheme. The second type of node numbering scheme takes less computational time and the less computer core memory. 4.3.2 Interpolation Polynomials The basic idea of the finite element method is piece wise approximation i.e. the solution of method is obtained by dividing the region of interest into small regions (finite elements) and approximating the solution over each sub region by simple function. Thus a necessary and important step is that of choosing simple function for the behavior of the solution within an element are called interpolation function or approximating functions or interpolation models. Polynomial type of interpolation function has been most widely used to the following reasons. 1. It is easier to formulate and computerize the finite element equations with polynomial type of interpolation functions. Specifically, it is easier to perform differentiation or integration with polynomials. 2. It is possible to improve the accuracy of the results by increasing the order of the polynomial, as shown in fig 6. Theoretically a polynomial of infinite order corresponds to the exact solution. But in practice we take polynomials of finite order only as approximation. In fig 6, an exact
Department of Mechanical engineering (CAD/CAM)
Page 32
ANALYSIS OF GAS TURBINE ROTOR DISC
solution for the field variable F(x) is approximated by various degree p polynomials of the general form 11111F(x) = 1+ 2.x+ 3.x2+ + n+1.xn The greater the number of terms included in the approximation the more closely the exact solution so represented. In equation a, the coefficients of the polynomial s are known as generalized coordinates, and n is the degree of polynomial. The above equation is for one-dimensional model. For two and three-dimensional finite elements the polynomial forms are below. Two-dimensional: F(x, y) = 1+ 2.x+ 3.y+4.x2+ 5.y2+6.x.y ++ n+1.xn Three-dimensional: F(x, y, z) = 1+ 2.x+ 3.y+4.z + 5.x2+6.y2 + 7.z2+ 8.x.y+ 9.x.y+ 10.z.x+ + m.z From the above three equations, for each order of polynomial we can have three equations from each one. In most of the practical application the order of the polynomial in the interpolation function is taken as one, two or three. The equations a to c reduces to the following equations for n=1. One-dimensional case: a) F(x)= 1+ 2.x Two-dimensional case: b) F(x, y)= 1+ 2.x+ 3.y Three-dimensional case: c) F(x, y, z) = 1+ 2.x+ 3.y+4.z On similar lines we can have the interpolation functions for n=2 and n=3 also. 4.3.2.1 Selection Of The Order Of the Interpolation Polynomial While considering the order of the polynomial in a polynomial type interpolation function, the following considerations have to be taken into account: 1. The interpolation polynomials should satisfy as far as possible, the convergence requirement. Department of Mechanical engineering (CAD/CAM) Page 33
ANALYSIS OF GAS TURBINE ROTOR DISC
2. The pattern of variation of the variable resulting from the polynomial model should be independent of the local coordinate systems. 3. The number of generalized coordinate (a) should be equal to the number of nodal degree of freedom of the element. The first consideration, the convergence requirement is very important aspect. It is given in the following separate section. According to the second consideration, the selection of the order of the model is that the pattern should be independent of the orientation of the local coordinate systems. This property of the model is known a geometry isotropy, or geometric invariance. For polynomials of linear order (i.e. n=1) the isotropy requirement is usually equivalent to the necessity of including constant strain rates. For higher order patterns, we can see intuitively that it is undesirable to have a preferential coordinate direction, in other words, the field variable representation with in an element and hence the polynomial, should not change with in local coordinate system when a linear transformation is made from one Cartesian selecting the order of terms involved in the polynomial equal to no of nodal degrees of freedom of element. 4.3.2.2 Convergent Requirement Since the finite element method is a numerical technique, we obtain a sequence of approximate solutions as the element size is reduced successively. These sequences will converge to the exact solutions if the interpolation polynomial satisfies the following requirements 1. The field variable must be constant with in the elements. The requirement is easily satisfied by choosing continuous functions as interpolation models. Since polynomials are inherently continuous, satisfy these requirements. 2. All uniform rates of the field variation and its partial derivative up to the highest order appearing in the function I () (i.e., I())= I(,d /dx,). Must have representation in the interpolation polynomial when in the limit, the element size reduces to zero. Thus the interpolation polynomial must be able to give a constant value of the field variable with in the element when the nodal values are numerically identical. 3. Similarly, when the body is sub divided into smaller and smaller element, the Department of Mechanical engineering (CAD/CAM) Page 34
ANALYSIS OF GAS TURBINE ROTOR DISC
partial derivatives of field variable unto the highest order appearing in the function I() approach a constant value with in each element. Thus we can not hope to obtain convergent to the exact solution unless the interpolation permits this constant derivative state. 4. The variable and its partial derivatives up to one order less than the highest order derivative appearing in the function I() must be continuous at element boundaries or interfaces. The elements whose interpolation polynomial satisfies the requirement (1) and (3) are called compatible or confirming elements and those satisfying condition (2) are called complete elements. 4.3.2.3 Nodal Degrees Of Freedom The basic idea of FEM is to consider a body as composed of several elements that are connected at specified node points. The un-known solutions or the field variable (like displacement, pressure or temperature) inside any finite element is assumed to be given by a simple function in terms of nodal values of that element. The nodal displacement rotations are necessary to specify completely the deformation of the finite element or the degrees of freedom. The nodal values of the solution, also known as nodal degrees of freedom, are treated as unknowns in formulating the system of overall equations. The solution of the system of equations (like force equilibrium equations) gives the value of the unknown nodal degrees of freedom. Once the nodal degrees of freedom are known, the solution within any element (and hence within complete body) will also be known to us. For having the results in terms of nodal degrees of freedom the interpolation function must be derived in terms of nodal degrees of freedom. 4.3.2.4 Coordinate System A local coordinate system is one that is defined for a particular element and necessary for the entire body or structure, the coordinate system for entire body is called as the global coordinate system. A natural coordinate system is a local coordinate system that permits a specification of a point with in the elements by a set of dimension less numbers whose magnitude never exceeds unity. The derivation of element characteristic matrices and vectors involves the integration of the shape Department of Mechanical engineering (CAD/CAM) Page 35
ANALYSIS OF GAS TURBINE ROTOR DISC
functions or their derivative or both over the element. These integrals can be evaluated easily if the interpolation functions are in terms of local coordinate system. 4.3.3 Formulation of Elements Characteristic Matrices And Vectors The characteristic matrices and characteristic vectors (also termed as vectors of nodal actions) of finite elements can be derived by using any of the following approaches. Direct approach In this method, direct physical reasoning is used to establish the element properties (characteristic matrices and vectors) in terms of permanent variables. Variational approach In this method, the finite element analysis interpolated as an approximate means of solving variational problems. Since most physical and engineering problems can be formulated in variation form, the finite element method can be readily applied for finding their appropriate solutions. The variational approach has been most widely used in the literature in formulating finite element equations. A major limitation of the method is that it requires the physical or engineering problem to be stated in variational form, which may not be possible in all cases. Weighted residual approachIn this method the element matrices and vectors are directly formed the governing deferential equations of the problem with out reliance on the variational statement of the problem. This method offers the most general procedure for deriving finite element equations and can be applied to almost all practical problems of science and engineering. Again with in the weighted residual approach different procedures can be used. They are i. Collocation method ii. Sub domain collocation method iii. Galkerian method iv. Least squares method 4.3.4 Assemble Of Element Matrices, Vectors and Derivation Of System Equations 4.3.4.1 Assemblage of Element Equations Once the element characteristics, namely the element matrices and element vectors are found in a global coordinate system, the next step is to construct the Department of Mechanical engineering (CAD/CAM) Page 36
ANALYSIS OF GAS TURBINE ROTOR DISC
overall or system equations. The element matrices are divided by the above stated methods in previous section. The element vectors are the unknown field variables and the loading conditions on any element. The process of constructing the algebraic equations for the assemblage from the equations for the individual elements is routine. The procedure of assembling the element matrices and vectors is based on the requirement of compatibility at the element nodes. This means that the nodes where elements are connected, the values of the unknown nodal degrees of freedom of variables are the same for all the elements joining at the nodes. Assume that the total number of elements in the assemblage is E and N is the total number of equations to be solved for the assemblage. Assume that we know stiffness matrix and load vectors for each element and that the element load vectors include all the loading on the body. The nodal displacements that is the unknown for entire assemblage, may be written as N*1 vectors {r}. If we let subscript e denote the element number, we can write the expanded element stiffness and loads as N*1 vectors {R(e)}. These are constructed by inserting the known stiffness coefficients and loads in their proper locations and filling the remaining locations with zeros. Thus the global characteristic matrix and the global characteristic matrix an the global characteristic vector can be obtained by algebraic addition as E [K]= [K (e)] e=1 And E [R]= [K (e)] e=1 by applying principle of minimum potential energy to assemblage and extremitization of condition to the following conclusion. E e=1 E e=1 ( [K (e)]){}=[R (e)] This may be abbreviated in the form Department of Mechanical engineering (CAD/CAM) Page 37
ANALYSIS OF GAS TURBINE ROTOR DISC
[K] {} ={R} The above procedure is applicable for any structure having any number of the finite elements. In fact the procedure is applicable equally top all types of problems. 4.3.4.2 Incorporation of Boundary Conditions After assembling the characteristic matrices [K (e)] and the element characteristic vectors [P (e)], the overall or system equations of the entire domain or body can be written (for an equilibrium problem) as [K] {} = {P} These equations cannot be solved for {f} since the matrix [K] will be singular and hence its inverse does not exist. The physical significance of this, in the case of solid mechanics problem, is that the loaded body or structure is free to undergo unlimited rigid body motion unless some support constraints are imposed to keep the body or structure in equilibrium under the loads. Hence some boundary or support conditions have to apply to equation before solving for {f}.In non structural problems; we have to specify the values of at least one and sometimes more than one nodal degrees of freedom. The number of degrees of freedom to be specified is dictated by the physics of the problem. 4.3.5 Solution of Finite Elements (Systems) Equations The finite element analysis of any physical problem led to a system of matrix equations. After incorporating the boundary conditions in the assembled system of equations as out lined in previous sections, we obtain the final matrix equations. If the problem is nonlinear the resulting matrix equations will also be nonlinear irrespective of the type of the problem. If the problem is nonlinear; some sort of an interactive procedure has to be used for finding the solution. For example, the matrix equation that results from the finite element analysis of a nonlinear equilibrium (or steady state) problem can be solved by using any one of the following schemes: 1. Newton Raphson methods 2. Continuation methods 3. Minimization methods 4. Perturbation methods
Department of Mechanical engineering (CAD/CAM)
Page 38
ANALYSIS OF GAS TURBINE ROTOR DISC
4.3.6 Computation of Element Results The solution of the final matrix equations yields the vectors of global nodal degrees of freedom of the body {f (e)} can be identified for any element e. If a local coordinates system was used in deriving the element characteristic matrices and vectors, the vectors of local degrees of freedom {f (e)} can be found from the transformation relation. After that we can find the variation of the field variable inside the element e from which the element desired resultant gradients of the field variable and associated quantities (strains and stresses in the case of solid mechanics and structural problems) can be computed. The previous sections explain theoretically about the step by step FEM procedure. The steps are described without going into deep how to solve the equations etc. but this will provide over all procedure of finite element method regardless type of problem.
Department of Mechanical engineering (CAD/CAM)
Page 39
ANALYSIS OF GAS TURBINE ROTOR DISC
CHAPTER 5 FEA SOFTWARE- ANSYS
Ansys
Ansys is general purpose finite element analysis software, which enables engineers to perform the following tasks i. ii. iii. iv. Build computer models or transfer CAD models structures, products, components or systems Apply operating loads or other design performance conditions Study the physical response such as stress levels, temperature distributions or the impact of electromagnetic fields Optimize a design early in the development process to reduce production costs A typical Ansys analysis has three distinct steps 1. Pre-processor (build the model) 2. Solution (applies loads and obtains the solution) 3. Postprocessor (review the results)
5.1 ANSYS DERIVED PRODUCTS
In addition to the ANSYS/Multiphysics program and its addition capabilities, a series of ANSYS derived products are available. These products are subsets of ANSYS derived from the ANSYS/Multiphysics program. ANSYS/Mechanical designed for linear and nonlinear, structural and thermal, static and dynamic/transient analyses. It enables users to solve a wide variety of analyses in mechanical and civil engineering applications. As mentioned previously, ANSYS/Mechanical has the linear stress, structural, dynamic analysis, buckling, sub structuring, heat transfer, thermal, acoustics and piezoelectric capabilities of ANSYS/Multiphysics but excludes the three additional options: electromagnetic, LS_DYNA Explicit dynamics and FLOTRON computational fluid dynamics (CFD). ANSYS/Structural product supports the following types structural analyses, structural statics, model, harmonic response, transient dynamic, spectrum, buckling, Department of Mechanical engineering (CAD/CAM) Page 40
ANALYSIS OF GAS TURBINE ROTOR DISC
nonlinear structural, and p-method structural static analysis. Useful for many civil and mechanical engineering applications, the product also enable you to solve fracture mechanics problems and nodal composites and to perform fatigue evaluations. The ANSYS/Structural product does not include the LS-DYNA explicit dynamics, thermal electromagnetic, CFD, acoustics or piezoelectric capabilities of ANSYS. ANSYS/Linear plus product enables you to do linear static and dynamic structural analyses. Dynamic analyses include modal, harmonic, transient and spectrum analyses. Although it is limited mostly to linear structural solutions, ANSYS/Linear plus has come nonlinear capabilities such as large deflection and stress stiffening for some elements and node to node contact elements. ANSYS/Thermal product has steady state and transient thermal analysis capabilities. ANSYS/Thermal allows for combined thermal-electric analyses for the elements supported in the product, it provides solution capabilities for variety of mechanical and electrical engineering applications. ANSYS/Emag is an electromagnetic field simulation product designed for static and low frequency electromagnetic, electrostatics, current condition, circuit simulation and coupled electromagnetic simulation. You can use the 3D version for both three dimensional and two dimensional models. The 2D version supports only two dimensional (planar or axisymmetric) models. When combined with ANSYS structural or thermal product, ANSYS/Emag also enables you to do coupled-magnetic thermal analysis (such as armature motion). If the add on FLOTRON CFD capability is available, you can also simulate electromagnetic CFD coupling. ANSYS/FLOTRON is a CFD (computational fluid dynamics) product for fluid flow and heat transfer analysis. It has the same capabilities as the add ion FLOTRONCFD capability described above. ANSYS/DYNA prep post is a pre-processing and post processing product that, add on LS-DYNA option described above enables you to perform explicit dynamic analyses. The difference between ANSYS/DYNA provides the LS/DYNA solver and pre post offers only an interface to LYDYNA with preprocessing and post processing.
Department of Mechanical engineering (CAD/CAM)
Page 41
ANALYSIS OF GAS TURBINE ROTOR DISC
ANSYS/Prep post is a pre-processing product designed for building large models and moving them to a different usually more powerful computer for solution. It has all the capabilities of AANSYS/Multi-physics.ANSYS/ED is an educational version of ANSYS designed for corporate training programs, academic institutions and self-study. It has all the capabilities of ANSYS/Multi-physics, including electromagnetic and FLOTRON CFD. The primary difference between ANSYS/Multi-physics and ANSYS/ED is that the educational product limits the size of the model and you can solve. In addition ANSYS/ED does not include composites and you cannot re-link the product to include user features.
5.2 PERFORMING A TYPICAL ANSYS ANALYSIS
The ANSYS program has many finite element analyses capabilities, ranging from a simple, linear, static analysis to a complex, nonlinear, transient dynamic analysis. The analysis guide manuals in the ANSYS documentation set describe specific procedures for performing analyses for different engineering disciplines. The next few sections of this chapter cover general steps that are common to most analyses. A typical ANSYS analysis has three distinct steps: i. ii. iii. Build the model Apply loads and obtain the solution Review the results Building a finite element model requires more of an ANSYS users time that any other part of the analysis. First job name and analysis titles are specified. Then, the PREP7 pre-processor is used to define the element types, element real constants and material properties and model geometry. Specify a job name and analysis titles. This task is not required for an analysis, but recommended.
5.2.1 Building a Model
Department of Mechanical engineering (CAD/CAM)
Page 42
ANALYSIS OF GAS TURBINE ROTOR DISC
5.2.2 Defining the Job Name The job name is the name that identifies the ANSYS job. When you define a job name for an analysis, the job name becomes the first part of the analysis creates. (The extension or suffix for these files names is a file identifier such as .bd) by using a job name for each analysis, we ensure that no files are over written. If job name is not defined, all files receive the name FILE or file, depending on the operating system. 5.2.3 Defining Units The ANSYS program does not assume a system of units for analysis except in magnetic field analysis, any system of units can be used. (Units must be consistent for all input data) 5.2.4 Defining Element Types The ANSYS element library contains more than 100 different element types. Each element type has unique number and a prefix that identifies the element category: BEAM4, PLANE77, QLID96 etc. The following element categories are available: 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. Beam Pipe Combination Plane Contact Shell Fluid Solid Hyper elastic Source Infinite Surface Link User Mass Interface Matrix Visco elastic Page 43
Department of Mechanical engineering (CAD/CAM)
ANALYSIS OF GAS TURBINE ROTOR DISC
The element type determines, among other things i. Degrees of freedom set (which in turns implies the discipline structural, thermal, magnetic, quadrilateral, electric, brick, etc.) ii. Whether the element lies in two dimensional or three dimensional 5.2.5 Defining Element Real Constants Element real; constant are properties that defined on the element type, such as cross sectional properties of a beam element. For example, real constants for BEAM3 the 2-D beam element or area (AREA), moment of inertia (IZZ), height (HEIGHT), shear deflection constant (SHEARZ), initial strain (ISTRN), and added per unit length (ADDMAS). Not all element types require real constants, and different elements of the same type may have differential real constant value. 5.2.6 Defining Material Properties Most element types require material properties. Depending on the application, material properties may be: i. linear or non-linear ii. isotropic, orthotropic or anisotropic iii. constant temperature or temperature dependent As with element types and real constant, each set of material properties has material reference number. The table of material reference numbers versus material property set is called material table. Within one analysis, you may have multiple material property sets (to correspond with multiple materials used in the model). ANSYS identifies each set with a unique reference number. 5.2.6.1 Linear Material Properties Linear material properties can be constant or temperature dependent and isotropic or orthotropic. 5.2.6.2 Nonlinear Material Properties Nonlinear material properties are usually tabular data, such as plasticity data, magnetic field data, creep data, swelling data, hyper elastic material data, etc.
Department of Mechanical engineering (CAD/CAM)
Page 44
ANALYSIS OF GAS TURBINE ROTOR DISC
5.2.7 Creating the Model Geometry Once material properties have defined, the next step in an analysis is generating a finite element model nodes and elements that adequately describe the model geometry. There are two methods to create the finite element model: 1. 2. solid modeling direct modeling
With solid modeling we describe the geometric shape and instruct the ANSYS program to automatically mesh the geometry with nodes and elements, in direct generation the location of each node and the connectivity of each element can be manually. 5.2.8 Applying Loads and Obtain the Solution 5.2.8.1 Applying Loads Loads applied include the boundary conditions (constraints, supports or boundary field specifications) as well as other externally and internally applied loads. Loads in the ANSYS program are divided into 6 categories. Degrees of freedom constraints Surface loads Inertia loads forces body loads coupled field loads
Most of these loads can be applied either on the solid model (key points. Lines and areas) or the finite element model (nodes and elements) two important load related terms in ANSYS are load step and sub step A load step is simply a configuration of loads for which you obtain a solution. In a structural analysis, for example, you may apply wind loads in one load step and gravity in second load step. Load step are also useful in dividing a transient load history curve into several segments. Sub steps are incremental steps taken within a load step. You use them mainly for accuracy and convergence purposes in transient and nonlinear analyses. Sub steps are also known as time stepssteps taken over a period of time. Note- the ANSYS program uses concept of time in transient analyses as well as static analyses.
Department of Mechanical engineering (CAD/CAM)
Page 45
ANALYSIS OF GAS TURBINE ROTOR DISC
With solid modeling we describe the geometric shape of model and instruct the ANSYS program to automatically mesh the geometry with nodes and elements in direct generation the location of each node and the connectivity of each element can be defined manually. 5.2.8.2 Specifying Load Step Options Load step options are options that you can change from load step to load step, such as number of sub steps, time at the end of a load step, and output controls. Depending on the type of analysis you are doing, load step options may or may not be required. The analysis procedures in the analysis guide manuals describe the appropriate load step options as necessary. 5.2.9 Solution In the phase of the analysis, the computer takes over and solves the simultaneous equations that the finite element generates. The results of the solution are: (a) Nodal degrees of freedom values, which from the primary solution (b) Derived values, which form the element solution. The element solution is usually calculated at the elements integration points. The ANSYS program writes the results to the database as well as to the result file. Several methods of solving the simultaneous equations are available in the ANSYS program such as: Frontal solution, sparse direct solution, Jacobi conjugate gradient solution, In complete cholesky conjugate gradient solution, Pre conditioned conjugate gradient solution and an automatic iterative solver option. 5.2.10 Post Processing Post processing means reviewing the results of an analysis, it is probably the most important step in the analysis, because you are trying to understand how the applied loads affect your design, how good your finite element mesh is and so two post processors are available to review your results: POST PROCESOR 1: The general post processor.
Department of Mechanical engineering (CAD/CAM)
Page 46
ANALYSIS OF GAS TURBINE ROTOR DISC
It allows you to review the results over the entire model at specific load steps and sub steps POST PROCESSOR 2: The time history post processor It allows you to review the results at specific time points in the model as a function of time or frequencies. It has many capabilities, ranging from simple graphics display and tabular listing to more complex operations such as differential calculus and response spectrum generation. It is important to remember that the post processors in ANSYS are just tools for reviewing analysis results. You still need to use your engineering judgment to interpret the results. 5.2.11 Results File The ANSYS solver writes results of an analysis to the results finding during solution. The name of the result file depends on the analysis discipline: Job name.RST Job name.RTH Job name.RMG Job name.RFL for a Structural analysis for a Thermal analysis for a Magnetic field analysis for a Flotron analysis
For a Flotron analysis, the file extension is .RFL, for other fluid analysis, the file extension is .RST or >RTH, depending on whether structural degrees of freedom are present. Using different file identifiers for different disciplines helps you in coupled field analysis where the results from one analysis are used as loads for another. This presents a complete description of coupled field analysis. 5.2.12 Types of Data Available For Post Processing The solution phase calculates two types of result data: i. Primary data consist of the degree of freedom solution calculated at each node displacements in a structural analysis, temperature in a thermal analysis, magnetic potentials in a magnetic analysis and so on.
Department of Mechanical engineering (CAD/CAM)
Page 47
ANALYSIS OF GAS TURBINE ROTOR DISC
ii. Derived data are those results calculated from the primary data, such as stresses and strains in a structural analysis. Thermal gradients and fluxes in a thermal analysis, magnetic fluxes in a magnetic analysis and the like.
5.3 ANALYZING THERMAL PHENOMENA
A thermal analysis calculates the temperature distribution and related quantities in system or components. Typical quantities of interest are: (i) The temperature distributions (ii) The amount of heat lost or gained (iii) Thermal gradients
(iv)Thermal fluxes Thermal simulations play an important role in the design of many engineering applications, including internal combustion engines, turbines and heat exchangers, piping systems and electronic components. In many cases engineering follow a thermal analysis with stress analysis to calculate thermal stresses i.e stresses caused by thermal expansions or contractions 5.3.1 How Ansys Treats Thermal Modeling Only the ANSYS/ Multi-physics, ANSYS/ Mechanical, ANSYS/ Thermal and ANSYS/ Flotron programs support thermal analysis. The basic for thermal analysis in ANSYS is a heat balance equation obtained from the principle of conservation of energy. The finite element solutions you perform via ANSYS calculate nodal temperatures, and then use the nodal temperatures to obtain other thermal quantities. The ANSYS program handles all three primary modes of heat transfer Conduction Convection Radiation 5.3.1.1 Conduction Department of Mechanical engineering (CAD/CAM) Page 48
ANALYSIS OF GAS TURBINE ROTOR DISC
ANSYS can solve conduction problems by inputting the steady state temperature values on lines of the model where the conduction takes place. 5.3.1.2 Convection An ANSYS user specifies convection as a surface load on conduction solid elements or shell elements. You specify the convection film co-efficient and bulk fluid temperature at surface, ANSYS then calculates the appropriate heat transfer across that surface. If the film co-efficient depends upon temperature, you specify a table of temperature along with the corresponding values of film co-efficient at each temperature. For use in finite element models with conducting bar elements which do not allow a convection surface load, or in cases where the bulk fluid temperature is not known in advance, ANSYS offers a convection element named LINK34. In addition you can use the Flotron CFD elements to simulate details of the convection process, such as fluid velocities, local values of film co-efficient and heat flux and temperature distributions in both fluid and solid regions. 5.3.1.3 Radiation ANSYS can solve radiation problem, which are non-linear in four ways, by using the radiation link element, LINK31, by using surface effect elements with the radiation option. By generating a radiation matrix and using it as a super element in a thermal analysis, by using radiation boundary conditions in a Flotron CFD analysis. 5.3.2 Special Effects In addition to the three modes of heat transfer you can account for special effect such as change of phase and internal heat generation. 5.3.3 Types of Thermal Analysis ANSYS supports two types of thermal analysis: (a) A steady state thermal analysis: It determines the temperature distribution and other thermal quantities under steady state loading conditions. A steady state loading condition is a solution where heat storage effects varying over a period of time can be ignored.
Department of Mechanical engineering (CAD/CAM)
Page 49
ANALYSIS OF GAS TURBINE ROTOR DISC
(b) A transient thermal analysis determines the temperature distribution and thermal quantities under conditions that vary over a period of time.
5.4 COUPLED-FIELD ANALYSIS
5.4.1 Definition of Coupled-Field Analysis A coupled-field analysis is an analysis that takes into account the interaction between two or more disciplines of engineering. For example a piezoelectric analysis handles the interaction between the structural and electric fields. It solves for the voltage distribution due to applied due to applied displacements or vice versa. Other examples of coupled-field analysis are thermal-stress analysis, thermal-electric analysis and fluid-structural analysis. Some of the applications in which coupled-field analysis may be required are pressure vessels, fluid flow constructions, induction heating, ultrasonic transducers, magnetic forming, and micro-electromechanical systems. 5.4.2 Types of Coupled-Field Analysis The procedure for a coupled-field analysis depends on which fields are being coupled but two distinct methods can be identified: Sequential and Direct. 5.4.2.1 Sequential Coupled-Field Analysis The sequential coupled-field analysis method involves two or more sequential analysis each belonging to a different field. There are different types of sequential coupled-field analysis. i. Physics analysis ii. Multi-field solver 5.4.2.1.1 Physics Analysis
Department of Mechanical engineering (CAD/CAM)
Page 50
ANALYSIS OF GAS TURBINE ROTOR DISC
In a sequential coupled physics analysis you can couple the two fields by applying results from one analysis as loads in another analysis. The load transfer occurs external to the analysis and you must explicitly transfer loads using the physics environment. An example of this type of analysis is a sequential thermal-stress analysis where nodal temperatures from the thermal analysis are applied as body force loads in the subsequent stress analysis. The physics analysis is based on a single finite element mesh across physics. Physics files can be used to perform coupled-field analysis. Physics files are created which prepare the single mesh for a given physics simulation. A solution proceeds in a sequential manner. A physics file is read to configure the database, a solution is performed, another physics field is read into the database, coupled-field loads are transformed and the second physics is solved. Coupling occurs by issuing commands to read the coupled load terms from one physics to another across a node-node similar mesh interface. 5.4.2.1.2 Multi-Field Solver The multi-field solver is available for a large class of coupled problems. The multi-field solver is an automated tool for solving sequentially coupled-field problems. It is superset of the fluid solid interaction solver and is an alternative for the physics file based procedure. It provides a robust accurate and easy to use tool for solving sequentially coupled-physics problems. The solver is built on the premise that each physics is created as a field with an independent solid model and mesh. Surfaces or volumes are identified for coupled loads are automatically transferred across dissimilar meshes by the solver. The solver is applicable to static, harmonic and transient analysis depending on the physics requirements. Any number of fields may be solved in a sequential manner. 5.4.2.2 Direct Coupled-Field Analysis The direct coupled-field analysis method usually involves just one analysis that uses a coupled-field element type containing all necessary degrees of freedom. Coupling is handling is handled by calculating element matrices or element load vectors that contain all necessary terms. An example of this is a piezoelectric analysis using the
Department of Mechanical engineering (CAD/CAM)
Page 51
ANALYSIS OF GAS TURBINE ROTOR DISC
PLANE 223, SOLID 226 or SOLID 227 elements. Another example is MEMS analysis with the TRANS 126 element. 5.4.3 WHEN TO USE DIRECT Vs. SEQUENTIAL Direct coupling is advantageous when the coupled-field interaction is highly nonlinear and is best solved in a single solution using a coupled formulation. Examples of direct coupling include piezoelectric analysis, conjugate heat transfer with fluid flow and circuit-electromagnetic analysis. Elements are specially formulated to solve these coupled-field interactions directly. For coupling situations which do not exhibit a high degree of nonlinear interaction the sequential method is more efficient and flexible because you can perform the two analyses independently of each other. Coupling may be recursive where iterations between the different physics are performed until the desired level of convergence is achieved. In a sequential thermal-stress analysis you can perform a nonlinear transient thermal analysis followed by a linear static stress analysis. You can then use nodal temperatures from any load step or time-point in the thermal analysis as loads for the stress analysis. In a sequential coupling analysis you can perform a nonlinear transient fluid-solid interaction analysis using Florton fluid element.
Department of Mechanical engineering (CAD/CAM)
Page 52
ANALYSIS OF GAS TURBINE ROTOR DISC
CHAPTER 6 RESULTS AND DISCUSSIONS
6.1 For Material B50A368
Department of Mechanical engineering (CAD/CAM)
Page 53
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.1 Von Mises Stress Distribution Von Mises is a theoretical measure of stress used to estimate yield failure criteria in materials. From figure 6.1 the maximum Von Mises stress is obtained at the inner radius of the disc at node 1 and the maximum stress value obtained is 1067 kg/cm.s^2. The minimum Von Mises stress is obtained at the outer radius of the disc at node 172 and the minimum stress value obtained is 66.908 kg/cm.s^2.
Fig 6.2 X-Component of Stress Department of Mechanical engineering (CAD/CAM) Page 54
ANALYSIS OF GAS TURBINE ROTOR DISC
The x- component of stress is the measure of stress distribution in x direction. From figure 6.2 the maximum stress value obtained is 333.434kg/cm.s^2 at node 56 and the minimum stress value obtained is -15.403 kg/m.s^2 at node 230.
Department of Mechanical engineering (CAD/CAM)
Page 55
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.3 Y-Component of Stress
The y- component of stress is the measure of stress distribution in y direction. From figure 6.3 the maximum stress value obtained is 331.731 kg/cm.s^2 at node 120 and the minimum stress value obtained is -44.503 kg/cm.s^2 at node 150.
Department of Mechanical engineering (CAD/CAM)
Page 56
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.4 Stress Intensity The stress intensity is used to more accurately predict the stress state near the tip of a crack caused by a remote load or residual stresses. It is a theoretical construct applicable to materials and is useful for providing a failure criterion for materials. From figure 6.4 the maximum intensity of stress obtained is 1192 kg/cm.s^2 at node 1 and the minimum intensity of stress obtained is 71.275 kg/cm.s^2 at node 172.
Department of Mechanical engineering (CAD/CAM)
Page 57
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.5 X-Component of Displacement
The x- component of displacement is the measure of displaced distance in x direction. From figure6.5 the maximum absolute displacement value obtained is 2.899 m at node 235 and the minimum absolute displacement value obtained is 0.1221 m
Department of Mechanical engineering (CAD/CAM)
Page 58
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.6 Y-Component of Displacement
The y- component of displacement is the measure of displaced distance in y direction.
From figure6.6 the maximum absolute displacement value obtained is -7422 m at node 220 and the minimum absolute displacement value obtained is -8625 m
Department of Mechanical engineering (CAD/CAM)
Page 59
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.7 Displacement Vector Sum The displacement vector sum is the vector sum of the displacements in both x and y directions. From figure 6.7 the maximum displacement vector sum value obtained is 8.923 m and the minimum displacement vector sum value obtained is 7.642 m.
6.2 For Material 1IN718
Department of Mechanical engineering (CAD/CAM) Page 60
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.8 Von Mises Stress Distribution Von Mises is a theoretical measure of stress used to estimate yield failure criteria in materials. From figure 6.8 the maximum Von Mises stress is obtained at the inner radius of the disc at node 1 and the maximum stress value obtained is 1058 kg/cm.s2. The minimum Von Mises stress is obtained at the outer radius of the disc at node 172 and the minimum stress value obtained is 66.373 kg/m.s2.
Department of Mechanical engineering (CAD/CAM)
Page 61
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.9 X-Component of Stress
The x- component of stress is the measure of stress distribution in x direction. From figure 6.9 the maximum stress value obtained is 330.623 kg/cm.s 2 at node 56 and the minimum stress value obtained is -15.276 kg/cm.s2 at node 230.
Department of Mechanical engineering (CAD/CAM)
Page 62
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.10 Y-Component of Stress
The y- component of stress is the measure of stress distribution in y direction. From figure 6.10 the maximum stress value obtained is 328.905 kg/cm.s^2 at node 120 and the minimum stress value obtained is -44.128kg/cm.s^2 at node 150.
Department of Mechanical engineering (CAD/CAM)
Page 63
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.11 Stress Intensity The stress intensity is used to more accurately predict the stress state near the tip of a crack caused by a remote load or residual stresses. It is a theoretical construct applicable to materials and is useful for providing a failure criterion for materials. From figure 6.11 the maximum intensity of stress obtained is 1182 kg/cm.s^2 at node 1 and the minimum intensity of stress obtained is 70.718 kg/cm.s^2 at node 172.
Department of Mechanical engineering (CAD/CAM)
Page 64
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.12 X-Component of Displacement
The x- component of displacement is the measure of displaced distance in x direction. From figure 6.12 the maximum absolute displacement value obtained is 3381 m at node 235 and the minimum absolute displacement value obtained is 142 m
Department of Mechanical engineering (CAD/CAM)
Page 65
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig 6.13 Y-Component of Displacement
The y- component of displacement is the measure of displaced distance in y direction.
From figure 6.13 the maximum absolute displacement value obtained is 123183 m at node 220 and the minimum absolute displacement value obtained is -1280 m
Department of Mechanical engineering (CAD/CAM)
Page 66
ANALYSIS OF GAS TURBINE ROTOR DISC
Fig. 6.14 Displacement Vector Sum The displacement vector sum is the vector sum of the displacements in both x and y directions. From figure 6.14 the maximum displacement vector sum value obtained is m and the minimum displacement vector sum value obtained is 461 m. 3528
Department of Mechanical engineering (CAD/CAM)
Page 67
ANALYSIS OF GAS TURBINE ROTOR DISC
CONCLUSIONS
1. The stress value obtained for material B50A368 is 1067kg/cm2 which is within the allowable limits i.e. 1000-1200 kg/cm2 2. The stress value obtained for material 1IN718 is 1058 kg/cm2 which crossed the allowable limits.900-1000kg/cm2
3. If the stress value obtained is greater than within the limits the material tends to get cracks at the earliest. Hence as the value of stress obtained for material 1IN718 is beyond the limits as a result of which it is not preferable for the usage in the manufacturing of gas turbine rotor disc. 4. From our analysis we conclude that the material B50A368 is best suited in the manufacture of gas turbine rotor disc.
Department of Mechanical engineering (CAD/CAM)
Page 68
ANALYSIS OF GAS TURBINE ROTOR DISC
References
1. GE Gas Turbine Design Philosophy. D.E. Brandet, R.R. Wesorick. 2. GE Industrial and power systems Schenedty,NY 3. Sawyer, J.W.ed., Gas turbine engineering handbook, Turbo machinery international publications, 1985. 4. Strength of materials: Stephen Timeshenko Advanced theory and problems.
5. Ansys Inc U.S.A.,Theory Manual 6. Desai and Abel,Introduction to finite Element Analysis 7. Yahya S.M., Turbines, compressors and fans, Tata Mc Graw-Hill publishing company limited, 1997. 8. Chandra Patla T.R., Belegundu A.D.,Finite Element Engineering Prentice Hall of India Ltd.,2001. 9. Dr.S.S.Rao,Introduction to Finite Element Analysis 10. SachdevHeat and mass transfer 1. www.gepower.com 2. www.specialmetals.com 3. www.materialscience.com
4. www.gooogle.com
Department of Mechanical engineering (CAD/CAM)
Page 69
Vous aimerez peut-être aussi
- Book 1 PDFDocument85 pagesBook 1 PDFAditya Mehta67% (3)
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideD'EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideÉvaluation : 4 sur 5 étoiles4/5 (8)
- DOE-Gas Turbine HandbookDocument549 pagesDOE-Gas Turbine HandbookKrasimir Ivanov88% (8)
- Small Wind: Planning and Building Successful InstallationsD'EverandSmall Wind: Planning and Building Successful InstallationsÉvaluation : 5 sur 5 étoiles5/5 (2)
- HFFM ManualDocument130 pagesHFFM ManualSilentisticsPas encore d'évaluation
- Pounder's Marine Diesel Engines and Gas TurbinesD'EverandPounder's Marine Diesel Engines and Gas TurbinesÉvaluation : 4 sur 5 étoiles4/5 (15)
- Interview Questions For s4HANADocument6 pagesInterview Questions For s4HANAVidya Dsouza80% (5)
- Comparison Between Trent 1000 and GenxDocument8 pagesComparison Between Trent 1000 and GenxRatnendra Singh100% (1)
- 1 1 PDFDocument74 pages1 1 PDFAbigor45Pas encore d'évaluation
- 1Q05 GasTurbineVibMonitoringDocument15 pages1Q05 GasTurbineVibMonitoringDimas Aji Kharisma CakraPas encore d'évaluation
- Gas Turbines A Manual PDFDocument74 pagesGas Turbines A Manual PDFHenry Pannell100% (1)
- Scramjets: Fuel Mixing and Injection SystemsD'EverandScramjets: Fuel Mixing and Injection SystemsPas encore d'évaluation
- Air Draft SystemDocument40 pagesAir Draft SystemSam100% (3)
- Tractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorD'EverandTractor Principles: The Action, Mechanism, Handling, Care, Maintenance and Repair of the Gas Engine TractorPas encore d'évaluation
- Design of Turbine BladeDocument15 pagesDesign of Turbine BladeKailash Chauhan100% (1)
- Ctc-214 Basic EngineDocument365 pagesCtc-214 Basic Engineernesto rodriguezPas encore d'évaluation
- Marine Gas TurbineDocument34 pagesMarine Gas TurbineAllesandraPas encore d'évaluation
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsD'EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsPas encore d'évaluation
- 2.72's Aircraft Engine Design Project: GE Transportation - Aircraft EnginesDocument43 pages2.72's Aircraft Engine Design Project: GE Transportation - Aircraft EnginesNikolaos KechagiasPas encore d'évaluation
- Gas Power Plants by Muhammad Arif: EE-415: Power Generation, Transmission and Distribution, Spring 2013Document31 pagesGas Power Plants by Muhammad Arif: EE-415: Power Generation, Transmission and Distribution, Spring 2013Muhammad Farooq MalikPas encore d'évaluation
- Gas Turbines: by Shalin Antony S MechanicalDocument42 pagesGas Turbines: by Shalin Antony S MechanicalshalinmechPas encore d'évaluation
- Study of Small Gas Turbine Engines of Thrust 1-5KNDocument6 pagesStudy of Small Gas Turbine Engines of Thrust 1-5KNInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- TurbineDocument9 pagesTurbineKabir Bashir ShariffPas encore d'évaluation
- Gas Turbine: Jump To Navigationjump To SearchDocument9 pagesGas Turbine: Jump To Navigationjump To SearchArctic BearPas encore d'évaluation
- Abb PDFDocument133 pagesAbb PDFAbid Lakhani67% (3)
- Part 2 Pressure Vessel DesignDocument281 pagesPart 2 Pressure Vessel DesignSyedZainAli100% (1)
- Gas Turbine Operation & Maintenance CourseDocument100 pagesGas Turbine Operation & Maintenance Coursewaheed2286100% (2)
- S06 - Turbine LossesDocument116 pagesS06 - Turbine LossesAmore S100% (1)
- Sap MM TutorialDocument190 pagesSap MM TutorialRobraggamofPas encore d'évaluation
- Technical Procedures: Numerical Listings of Support Equipment and Consumable Materials (Level 1 and 2 Maintenance)Document28 pagesTechnical Procedures: Numerical Listings of Support Equipment and Consumable Materials (Level 1 and 2 Maintenance)exergicPas encore d'évaluation
- The Modern Gas TurbineDocument6 pagesThe Modern Gas TurbinelaurciobanuPas encore d'évaluation
- Manufacturing of Steam and Gas Turbine Fnal ReportDocument60 pagesManufacturing of Steam and Gas Turbine Fnal Reportapi-363609191100% (1)
- Gas Turbines Applications ReportDocument9 pagesGas Turbines Applications ReportKareem Ibrahim Mohamed NasrPas encore d'évaluation
- 11 Fracture MechanicsDocument31 pages11 Fracture MechanicsBanambar Singh100% (1)
- Gas Pipeline PresentationDocument18 pagesGas Pipeline PresentationudelmarkPas encore d'évaluation
- Interview Questions For S4HANA.Document92 pagesInterview Questions For S4HANA.Uma MaheshPas encore d'évaluation
- Free Piston Stirling 7kwDocument8 pagesFree Piston Stirling 7kwmikialePas encore d'évaluation
- The SST 600Document4 pagesThe SST 600yogacruisePas encore d'évaluation
- Gas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesD'EverandGas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesPas encore d'évaluation
- Bhel TrainingDocument41 pagesBhel TrainingArun AroraPas encore d'évaluation
- Study of a reluctance magnetic gearbox for energy storage system applicationD'EverandStudy of a reluctance magnetic gearbox for energy storage system applicationÉvaluation : 1 sur 5 étoiles1/5 (1)
- Pasgt Act 3Document7 pagesPasgt Act 3Ramil SalundagaPas encore d'évaluation
- Design and Modeling of Axial Micro Gas TurbineDocument10 pagesDesign and Modeling of Axial Micro Gas TurbineEnrique MartinezPas encore d'évaluation
- Micro TurbineDocument24 pagesMicro Turbinesabale_007Pas encore d'évaluation
- MicroturbinesDocument45 pagesMicroturbinesshareena tajPas encore d'évaluation
- 13 BNDocument24 pages13 BNVulebg VukoicPas encore d'évaluation
- Managing The Operation of Propulsion Plant Machinery CDocument109 pagesManaging The Operation of Propulsion Plant Machinery CPanagiwtis M.Pas encore d'évaluation
- E3sconf Icpeme2018 02008Document4 pagesE3sconf Icpeme2018 02008Nova BitesPas encore d'évaluation
- 1977 - Wildman - Developments in Steam TurbinesDocument6 pages1977 - Wildman - Developments in Steam TurbinesManoj Kumar100% (1)
- The Emerging Prime Mover: Authored By: Martin Leduc, March 2001Document8 pagesThe Emerging Prime Mover: Authored By: Martin Leduc, March 2001Fait HeePas encore d'évaluation
- Report On Gas TurbineDocument33 pagesReport On Gas TurbineKanika Kumar100% (1)
- Ahmadi Munib - Indonesia - Gas Turbine Used As Future Propulsion SystemDocument9 pagesAhmadi Munib - Indonesia - Gas Turbine Used As Future Propulsion SystemAhmadi MunibPas encore d'évaluation
- Chapter 1Document36 pagesChapter 1sanky reddyPas encore d'évaluation
- IRE - 21 TURBOFAN ENGINE DESIGN - Group - 2Document52 pagesIRE - 21 TURBOFAN ENGINE DESIGN - Group - 2Mr. Jaykumar JoshiPas encore d'évaluation
- Auxiliary Power Units: TurbochargerDocument62 pagesAuxiliary Power Units: TurbochargerVulebg VukoicPas encore d'évaluation
- Gas Turbine ApplicationDocument15 pagesGas Turbine ApplicationsecahegazyPas encore d'évaluation
- Turbo Lec 1Document26 pagesTurbo Lec 1mohamed mostafaPas encore d'évaluation
- Auxiliary Power Units: TurbochargerDocument59 pagesAuxiliary Power Units: TurbochargerVulebg VukoicPas encore d'évaluation
- Lec.1 Gas Turbine CyclesDocument31 pagesLec.1 Gas Turbine Cyclesعبدالرحمن منصورPas encore d'évaluation
- Gas Turbine - Seminar ReportDocument16 pagesGas Turbine - Seminar ReportVHD DevolopersPas encore d'évaluation
- Gas Turbines in Simple Cycled & Combinated Cycled AppDocument74 pagesGas Turbines in Simple Cycled & Combinated Cycled AppLENDPas encore d'évaluation
- Scientific American Supplement, No. 633, February 18, 1888D'EverandScientific American Supplement, No. 633, February 18, 1888Pas encore d'évaluation
- Configuration Document PDFDocument5 pagesConfiguration Document PDFUma MaheshPas encore d'évaluation
- Domestic Purchase-Intergration PDFDocument13 pagesDomestic Purchase-Intergration PDFUma MaheshPas encore d'évaluation
- HA250 COL11NewDocument143 pagesHA250 COL11Newjesude7Pas encore d'évaluation
- Sap MM Defining StructureDocument13 pagesSap MM Defining StructureUma MaheshPas encore d'évaluation
- Configuration Steps For Service Tax Reversal Mechanism To ClientDocument16 pagesConfiguration Steps For Service Tax Reversal Mechanism To ClientUma MaheshPas encore d'évaluation
- Material Master - Unit PDFDocument6 pagesMaterial Master - Unit PDFUma MaheshPas encore d'évaluation
- CIN TransactionsDocument37 pagesCIN TransactionsUma MaheshPas encore d'évaluation
- Goods and Services Tax (GST)Document6 pagesGoods and Services Tax (GST)Uma MaheshPas encore d'évaluation
- Bank Exams Today - Word List - Text.marked - 1Document35 pagesBank Exams Today - Word List - Text.marked - 1Uma MaheshPas encore d'évaluation
- Material master-AS-IS PDFDocument7 pagesMaterial master-AS-IS PDFUma MaheshPas encore d'évaluation
- Parametric Study and Multi-Criteria Optimization in Laser Cladding by A High Power Direct Diode LaserDocument20 pagesParametric Study and Multi-Criteria Optimization in Laser Cladding by A High Power Direct Diode LaserUma MaheshPas encore d'évaluation
- Me1403.PDF CimDocument5 pagesMe1403.PDF CimUma MaheshPas encore d'évaluation
- CFD Viscous Flow - Note 01Document18 pagesCFD Viscous Flow - Note 01Uma MaheshPas encore d'évaluation
- Piping Codes (41-45piping)Document42 pagesPiping Codes (41-45piping)qusrooPas encore d'évaluation
- As Me Codes StandardsDocument34 pagesAs Me Codes StandardsUma MaheshPas encore d'évaluation
- LCM Text MarkedDocument8 pagesLCM Text MarkedUma Mahesh0% (1)
- Maths Shortcuts PDFDocument7 pagesMaths Shortcuts PDFTochi Krishna AbhishekPas encore d'évaluation
- CFD NotesDocument68 pagesCFD NotesPraveen P JosePas encore d'évaluation
- Engineering Thermodynamics (Nov, Dec2008) R2004Document4 pagesEngineering Thermodynamics (Nov, Dec2008) R2004Vijaya Prabhu KumarasamyPas encore d'évaluation
- FMM Lab Manual ReportDocument7 pagesFMM Lab Manual ReportUma MaheshPas encore d'évaluation
- General Strategies For RCDocument7 pagesGeneral Strategies For RCAnil Kumar SudarsiPas encore d'évaluation
- Me2208: Fluid Mechanics and Machinery Lab Mechanical EngineeringDocument3 pagesMe2208: Fluid Mechanics and Machinery Lab Mechanical EngineeringPrema LathaPas encore d'évaluation
- 15Document15 pages15Uma MaheshPas encore d'évaluation
- Anna University: Chennai - 600 025Document2 pagesAnna University: Chennai - 600 025Uma MaheshPas encore d'évaluation
- Blower and ImpellerDocument22 pagesBlower and ImpellermukeshPas encore d'évaluation
- Chapter 2 PDFDocument26 pagesChapter 2 PDFBelayneh TadessePas encore d'évaluation
- Brochure Fans Axial Variax AftermarketDocument8 pagesBrochure Fans Axial Variax Aftermarketkarlos1407Pas encore d'évaluation
- Thermal Univ QBDocument15 pagesThermal Univ QBrajapratyPas encore d'évaluation
- Computer Aided Simulation LaboratoryDocument28 pagesComputer Aided Simulation LaboratoryThandial SelvamPas encore d'évaluation
- 4B-4013 - Air CompressionDocument11 pages4B-4013 - Air Compressionaaquib76Pas encore d'évaluation
- Analysis of The Entire Surge Cycle of A Multi-Stage High-Speed CompressorDocument14 pagesAnalysis of The Entire Surge Cycle of A Multi-Stage High-Speed Compressorinam vfPas encore d'évaluation
- 7-Compressors Theory 7pDocument7 pages7-Compressors Theory 7psrisaitejaswiniPas encore d'évaluation
- ITTC, Performance Prediction Method - 2021Document19 pagesITTC, Performance Prediction Method - 2021mohamedPas encore d'évaluation
- U83 Aircraft Gas Turbine Engines AM2 PDFDocument11 pagesU83 Aircraft Gas Turbine Engines AM2 PDFJimmy HaddadPas encore d'évaluation
- GT2007 27064 PDFDocument10 pagesGT2007 27064 PDFEfrain VallePas encore d'évaluation
- Centrifugal CompressorDocument2 pagesCentrifugal CompressorAyman EsaPas encore d'évaluation
- Steam Power PlantDocument56 pagesSteam Power PlantصصPas encore d'évaluation
- Refrigeration: Refrigerant CompressorDocument88 pagesRefrigeration: Refrigerant CompressorKhalidPas encore d'évaluation
- Flow StraightnerDocument28 pagesFlow StraightnerMr. T. Micha Premkumar Assistant Professor II - MECHPas encore d'évaluation
- Compression ExpansionDocument32 pagesCompression ExpansionSamyak JainPas encore d'évaluation
- 4-Turbine Engine OperationDocument13 pages4-Turbine Engine Operationkriscortez05Pas encore d'évaluation
- Compressor and Classification of Compressor Operation Industrial UsesDocument4 pagesCompressor and Classification of Compressor Operation Industrial UsesMark StrifePas encore d'évaluation