Vous aimerez peut-être aussi
- Using Global Positioning Systems (GPS) : How It Works, Limitations, and Some Guidelines For OperationDocument45 pagesUsing Global Positioning Systems (GPS) : How It Works, Limitations, and Some Guidelines For OperationRajPas encore d'évaluation
- Uncertainties in GPS Positioning: A Mathematical DiscourseD'EverandUncertainties in GPS Positioning: A Mathematical DiscourseÉvaluation : 3 sur 5 étoiles3/5 (2)
- DGPSDocument20 pagesDGPStobinonline15730100% (1)
- The SatNav Users Guide to Navigation and Mapping Using GPSD'EverandThe SatNav Users Guide to Navigation and Mapping Using GPSÉvaluation : 1 sur 5 étoiles1/5 (2)
- Engleski Jezik Seminarski RadDocument19 pagesEngleski Jezik Seminarski RadDjoledjokicPas encore d'évaluation
- A Kalman Filter Approach To Reduce Position Error For Pedestrian Applications in Areas of Bad GPS ReceptionDocument36 pagesA Kalman Filter Approach To Reduce Position Error For Pedestrian Applications in Areas of Bad GPS ReceptionMohamed NourPas encore d'évaluation
- State Exam QDocument71 pagesState Exam QAngie LoayzaPas encore d'évaluation
- GPS For GIS: What's Really Involved?Document29 pagesGPS For GIS: What's Really Involved?alex_mdecPas encore d'évaluation
- Tarea 3 - Calcular Coordenadas de PI y Análisis Levantamientos TopográficosDocument10 pagesTarea 3 - Calcular Coordenadas de PI y Análisis Levantamientos TopográficosLuisa Maria GalvisPas encore d'évaluation
- GPS Practical Field Guide For SurveyorsDocument186 pagesGPS Practical Field Guide For Surveyorscrystalthomas1Pas encore d'évaluation
- GIS Guidelines Data CollectionDocument25 pagesGIS Guidelines Data CollectionKiruba Sankar VaradharajanPas encore d'évaluation
- GPS Data and Correction ServicesDocument3 pagesGPS Data and Correction Servicesluis antonio rizoPas encore d'évaluation
- GPS Guidefor Beginners ManualDocument9 pagesGPS Guidefor Beginners ManualbagastcPas encore d'évaluation
- Global Positioning System (GPS)Document13 pagesGlobal Positioning System (GPS)ratheeshbrPas encore d'évaluation
- Global Positioning System and Its Application: Name: MD Asadul HoqueDocument13 pagesGlobal Positioning System and Its Application: Name: MD Asadul HoqueMosiour RahmanPas encore d'évaluation
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDocument15 pagesGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura APas encore d'évaluation
- SIRGAS2000Document15 pagesSIRGAS2000BOOBOOPas encore d'évaluation
- GPS Power PointDocument18 pagesGPS Power PointAtri GulatiPas encore d'évaluation
- GPS System ReportDocument17 pagesGPS System ReportKanik SharmaPas encore d'évaluation
- Geo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataDocument16 pagesGeo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataGopi Krishna ValluriPas encore d'évaluation
- Gps & Its ApplicationsDocument6 pagesGps & Its ApplicationsjagamohanPas encore d'évaluation
- BasicsDocument46 pagesBasicsrvenkata@gmail.comPas encore d'évaluation
- Standards and Guidelines For Land Surveying Using GPS Ver 2.1.3Document61 pagesStandards and Guidelines For Land Surveying Using GPS Ver 2.1.3Cristian Gavrilescu100% (1)
- Intro GGDocument50 pagesIntro GGKhairul FajriPas encore d'évaluation
- Survey Questions and Answers For Colleges, Professional Exams and Promotion InterviewDocument57 pagesSurvey Questions and Answers For Colleges, Professional Exams and Promotion InterviewAnthony ManadongPas encore d'évaluation
- GPS AssignmentDocument8 pagesGPS AssignmentChristine M M Mariwo100% (1)
- GPS Project ReportDocument21 pagesGPS Project Reportrajansoni5675% (4)
- Ensayo Capitulo # 1Document3 pagesEnsayo Capitulo # 1Perea Sanchez CarlitosPas encore d'évaluation
- Question GisDocument3 pagesQuestion GisAditya SinghPas encore d'évaluation
- Sham JasDocument25 pagesSham JasNithin MohanPas encore d'évaluation
- Lobal Ositioning Ystem: Welcome To Physics Project OnDocument27 pagesLobal Ositioning Ystem: Welcome To Physics Project OnYuvraj SainiPas encore d'évaluation
- Extended Definition-Gps RevisedDocument6 pagesExtended Definition-Gps Revisedapi-534329247Pas encore d'évaluation
- Global Positioning SystemDocument6 pagesGlobal Positioning SystemAlyssa Alexis RamosPas encore d'évaluation
- Intro GGDocument54 pagesIntro GGfredy rizalPas encore d'évaluation
- Eng Plso Gps GuidebookDocument66 pagesEng Plso Gps GuidebookParashuram PatilPas encore d'évaluation
- 4 - GIS Data Collection - EngDocument11 pages4 - GIS Data Collection - EngAhmed HassanPas encore d'évaluation
- Title: GPS: Global Positioning SystemDocument18 pagesTitle: GPS: Global Positioning SystemBa HoPas encore d'évaluation
- A Report On GNSS: Institute of Engineering Pulchowk CampusDocument22 pagesA Report On GNSS: Institute of Engineering Pulchowk CampusRitesh Thapa100% (1)
- GIS Past Paper ExamsDocument11 pagesGIS Past Paper ExamsShoturu100% (4)
- tm11 D1Document120 pagestm11 D1Sami AjPas encore d'évaluation
- IG700 GU UppgiftDocument9 pagesIG700 GU Uppgiftartembrusentsov5Pas encore d'évaluation
- Applications of Remote SensingDocument28 pagesApplications of Remote SensingAkande Olumide SamuelPas encore d'évaluation
- Vidzeme University of Applied Sciences: Global Positioning SystemsDocument4 pagesVidzeme University of Applied Sciences: Global Positioning SystemsOleg AndreevPas encore d'évaluation
- Application of GPS-RTK Technology in The Land ChanDocument6 pagesApplication of GPS-RTK Technology in The Land ChanVenkat IPas encore d'évaluation
- Intro: Global Navigation Satellite System Location United StatesDocument11 pagesIntro: Global Navigation Satellite System Location United StatesVirendra GuptaPas encore d'évaluation
- Land Measurement ScienceDocument7 pagesLand Measurement Sciencealinaitwe shalifuPas encore d'évaluation
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oPas encore d'évaluation
- The Global Positioning System: I. Introduction - What Is GPSDocument9 pagesThe Global Positioning System: I. Introduction - What Is GPSBruno LopesPas encore d'évaluation
- Understanding The Global Positioning SystemDocument10 pagesUnderstanding The Global Positioning SystemAchutKiranCherukuriPas encore d'évaluation
- Mobile Tracking Application: Radhika Kinage, Jyotshna Kumari, Purva Zalke, Meenal KulkarniDocument7 pagesMobile Tracking Application: Radhika Kinage, Jyotshna Kumari, Purva Zalke, Meenal KulkarniArøn ParPas encore d'évaluation
- 1.1 Geographic Information SystemDocument5 pages1.1 Geographic Information SystemsrithavikaPas encore d'évaluation
- GPS System: Three Components of The GPSDocument6 pagesGPS System: Three Components of The GPSAnonymous JEzHIEUNPas encore d'évaluation
- A Simplified NMEA Sentence Generator For The Simulation of GPS TrackingDocument8 pagesA Simplified NMEA Sentence Generator For The Simulation of GPS TrackingsivalaPas encore d'évaluation
- GPS Facts Principles of GPS PDFDocument44 pagesGPS Facts Principles of GPS PDFTojo T VarghesePas encore d'évaluation
- Global Positioning SystemDocument5 pagesGlobal Positioning SystemDeekshitha RaPas encore d'évaluation
- Sensors: Energy-Efficient Collaborative Outdoor Localization For Participatory SensingDocument21 pagesSensors: Energy-Efficient Collaborative Outdoor Localization For Participatory SensingJayanth CRPas encore d'évaluation
- Canada RTK UserGuide v1 1 enDocument30 pagesCanada RTK UserGuide v1 1 enRey Castillo100% (1)
- GPS (Global Positioning System) - Andi English-FinalDocument38 pagesGPS (Global Positioning System) - Andi English-FinalAndi AnriansyahPas encore d'évaluation
- GPS SurveyingDocument5 pagesGPS Surveyingsaravanakumar100% (1)
- Seminar Frogtetnt Page MukeshkumarLDocument4 pagesSeminar Frogtetnt Page MukeshkumarLakki11190Pas encore d'évaluation
- Fielding DissertationDocument180 pagesFielding DissertationomnisisPas encore d'évaluation
- Cad For Vlsi Design PeosDocument4 pagesCad For Vlsi Design Peosakki11190Pas encore d'évaluation
- Thesis and Dissertation TopicsDocument5 pagesThesis and Dissertation Topicsakki11190Pas encore d'évaluation
- A Seminar On: "Bubble Power"Document18 pagesA Seminar On: "Bubble Power"akki11190Pas encore d'évaluation
- Front Pages Semisffdnar MukeshDocument1 pageFront Pages Semisffdnar Mukeshakki11190Pas encore d'évaluation
- Advance MP LabDocument3 pagesAdvance MP Labakki11190Pas encore d'évaluation
- Wireless Charging of RfregmobileDocument29 pagesWireless Charging of Rfregmobileakki11190Pas encore d'évaluation
- Wireless Power Transmission - SoubelDocument46 pagesWireless Power Transmission - SoubelJaibin JosePas encore d'évaluation
- MW LabDocument3 pagesMW Labakki11190Pas encore d'évaluation
- MW LabDocument3 pagesMW Labakki11190Pas encore d'évaluation
- Lic Peo FormatDocument8 pagesLic Peo Formatakki11190Pas encore d'évaluation
- Smart CardsDocument44 pagesSmart CardsRakesh PonnojuPas encore d'évaluation
- Dac Lab Requirement..Document1 pageDac Lab Requirement..akki11190Pas encore d'évaluation
- RtuDocument6 pagesRtuakki11190Pas encore d'évaluation
- Seminar Report On Remote SensingDocument28 pagesSeminar Report On Remote Sensingakki1119044% (9)
- Handbook For Sea Ice Analysis and Forecasting.05Document33 pagesHandbook For Sea Ice Analysis and Forecasting.05Christopher Praveen KumarPas encore d'évaluation
- AsdfdsdafDocument30 pagesAsdfdsdafakki11190Pas encore d'évaluation
- NEXT-Generation Wireless Systems With New Transmit Diversity SchemeDocument5 pagesNEXT-Generation Wireless Systems With New Transmit Diversity Schemeakki11190Pas encore d'évaluation
- Georeferencers Finalproject wk4Document13 pagesGeoreferencers Finalproject wk4api-276783092100% (1)
- DemintroDocument31 pagesDemintroiketPas encore d'évaluation
- Flooding Calamvale Flood Flag MapDocument1 pageFlooding Calamvale Flood Flag MapNgaire TaylorPas encore d'évaluation
- How To - Create A Watershed Model Using The Hydrology Toolset in ArcGIS ProDocument8 pagesHow To - Create A Watershed Model Using The Hydrology Toolset in ArcGIS ProAR MUTTAQIENPas encore d'évaluation
- Raster Vector ConversionDocument24 pagesRaster Vector ConversionSudung SitumorangPas encore d'évaluation
- Final Exam 2014-QuestionDocument2 pagesFinal Exam 2014-QuestionPannhaa100% (2)
- Henning ResumeDocument1 pageHenning Resumeapi-341110928Pas encore d'évaluation
- 1549382936URP 1281 L-10-14 Map Projection and Coordinate SystemDocument82 pages1549382936URP 1281 L-10-14 Map Projection and Coordinate SystemAhad HossainPas encore d'évaluation
- Latitude and Longitude: Finding Your Location Throughout The World!Document40 pagesLatitude and Longitude: Finding Your Location Throughout The World!gwr100% (1)
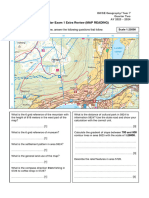
- Semester Exam 1 Extra Review (MAP READING) : IGCSE Geography/ Year 7 Quarter Two AY 2023 - 2024Document2 pagesSemester Exam 1 Extra Review (MAP READING) : IGCSE Geography/ Year 7 Quarter Two AY 2023 - 2024russelljacobmPas encore d'évaluation
- DGPS Survey of Boundaries in State Forest DepartmentsDocument16 pagesDGPS Survey of Boundaries in State Forest DepartmentsLakhwinder SinghPas encore d'évaluation
- Design LumajangDocument19 pagesDesign LumajangdimasPas encore d'évaluation
- (ვ. ჩხაიძე, ი. სალუქვაძე) ინფორმაციული ტექნოლოგიები გეოგრაფიაში 2016Document78 pages(ვ. ჩხაიძე, ი. სალუქვაძე) ინფორმაციული ტექნოლოგიები გეოგრაფიაში 2016NatiaPas encore d'évaluation
- Geodesy, Map Projections and Coordinate SystemsDocument54 pagesGeodesy, Map Projections and Coordinate SystemsSolai NathanPas encore d'évaluation
- Educational Stages:: Elementary Abu Bakr Al-Siddiq School (Khartoum (KhartoumDocument6 pagesEducational Stages:: Elementary Abu Bakr Al-Siddiq School (Khartoum (KhartoumMohamed GlaiowPas encore d'évaluation
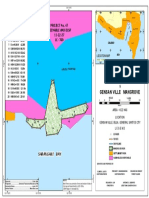
- 40 Gensan Ville - Bula - Mangrove PDFDocument1 page40 Gensan Ville - Bula - Mangrove PDFCirilo Jr. LagnasonPas encore d'évaluation
- Arc Hydro Groundwater IntroduccionDocument11 pagesArc Hydro Groundwater IntroduccionFrancoPaúlTafoyaGurtzPas encore d'évaluation
- By James Rubenstein: Key Issue 1Document46 pagesBy James Rubenstein: Key Issue 1Ryan Q QuirkPas encore d'évaluation
- Technical Description: BoundariesDocument10 pagesTechnical Description: BoundariesJohn Rey MontemorPas encore d'évaluation
- Geographic Information Metadata-An Outlook From The International Standardization PerspectiveDocument39 pagesGeographic Information Metadata-An Outlook From The International Standardization PerspectiveratihokebgtPas encore d'évaluation
- 06 Bushfire Hazard Overlay MapsDocument3 pages06 Bushfire Hazard Overlay MapsCarlos D. GuiradosPas encore d'évaluation
- Map - EritreaDocument1 pageMap - Eritreacartographica100% (15)
- FM 21-31 Topographical SymbolsDocument145 pagesFM 21-31 Topographical SymbolsL CPas encore d'évaluation
- Drone SurveyDocument4 pagesDrone Survey丨ㄒ丂ᐯ乇ᗪ卂几ㄒPas encore d'évaluation
- Java Topology Suite in Action: Combining ESRI and Open SourceDocument36 pagesJava Topology Suite in Action: Combining ESRI and Open SourceVACUNAS URUGUAYPas encore d'évaluation
- Mapa Geologico HuacaretaDocument1 pageMapa Geologico Huacaretavanesa100% (1)
- Distance CalculatorDocument112 pagesDistance CalculatortomsamcongPas encore d'évaluation
- Lab 2 Instructions For 2023Document6 pagesLab 2 Instructions For 2023Hao fPas encore d'évaluation
- A. Georeferencing Using Geographic Information System (QGIS) SoftwareDocument11 pagesA. Georeferencing Using Geographic Information System (QGIS) SoftwareDaniel Santos100% (2)
- Dvrs Survey Data.Document3 pagesDvrs Survey Data.Asan IbrahimPas encore d'évaluation
- Smokejumper: A Memoir by One of America's Most Select Airborne FirefightersD'EverandSmokejumper: A Memoir by One of America's Most Select Airborne FirefightersPas encore d'évaluation
- Periodic Tales: A Cultural History of the Elements, from Arsenic to ZincD'EverandPeriodic Tales: A Cultural History of the Elements, from Arsenic to ZincÉvaluation : 3.5 sur 5 étoiles3.5/5 (137)
- The Comfort of Crows: A Backyard YearD'EverandThe Comfort of Crows: A Backyard YearÉvaluation : 4.5 sur 5 étoiles4.5/5 (23)
- The Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterD'EverandThe Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterPas encore d'évaluation
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseD'EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseÉvaluation : 3.5 sur 5 étoiles3.5/5 (69)
- The Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TableD'EverandThe Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TableÉvaluation : 3.5 sur 5 étoiles3.5/5 (22)
- When the Sahara Was Green: How Our Greatest Desert Came to BeD'EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BeÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- Water to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesD'EverandWater to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesÉvaluation : 4 sur 5 étoiles4/5 (21)
- So Others May Live: Coast Guard's Rescue Swimmers Saving Lives, Defying DeathD'EverandSo Others May Live: Coast Guard's Rescue Swimmers Saving Lives, Defying DeathÉvaluation : 4.5 sur 5 étoiles4.5/5 (6)
- The Weather Machine: A Journey Inside the ForecastD'EverandThe Weather Machine: A Journey Inside the ForecastÉvaluation : 3.5 sur 5 étoiles3.5/5 (31)
- Alien Oceans: The Search for Life in the Depths of SpaceD'EverandAlien Oceans: The Search for Life in the Depths of SpaceÉvaluation : 4.5 sur 5 étoiles4.5/5 (26)
- Survival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosD'EverandSurvival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Pitfall: The Race to Mine the World’s Most Vulnerable PlacesD'EverandPitfall: The Race to Mine the World’s Most Vulnerable PlacesPas encore d'évaluation
- A Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeD'EverandA Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeÉvaluation : 5 sur 5 étoiles5/5 (4)
- Run the Storm: A Savage Hurricane, a Brave Crew, and the Wreck of the SS El FaroD'EverandRun the Storm: A Savage Hurricane, a Brave Crew, and the Wreck of the SS El FaroÉvaluation : 4 sur 5 étoiles4/5 (39)
- A Brief History of Earth: Four Billion Years in Eight ChaptersD'EverandA Brief History of Earth: Four Billion Years in Eight ChaptersÉvaluation : 4 sur 5 étoiles4/5 (112)
- The Big Burn: Teddy Roosevelt and the Fire that Saved AmericaD'EverandThe Big Burn: Teddy Roosevelt and the Fire that Saved AmericaÉvaluation : 5 sur 5 étoiles5/5 (9)
- The World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsD'EverandThe World Beneath: The Life and Times of Unknown Sea Creatures and Coral ReefsÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Exploring Creation with Physical Science, 3rd EditionD'EverandExploring Creation with Physical Science, 3rd EditionÉvaluation : 5 sur 5 étoiles5/5 (2)
- When Humans Nearly Vanished: The Catastrophic Explosion of the Toba VolcanoD'EverandWhen Humans Nearly Vanished: The Catastrophic Explosion of the Toba VolcanoÉvaluation : 4.5 sur 5 étoiles4.5/5 (34)
- Civilized To Death: The Price of ProgressD'EverandCivilized To Death: The Price of ProgressÉvaluation : 4.5 sur 5 étoiles4.5/5 (215)