Vous aimerez peut-être aussi
- Variable Speed AC Drives with Inverter Output FiltersD'EverandVariable Speed AC Drives with Inverter Output FiltersPas encore d'évaluation
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsD'EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsPas encore d'évaluation
- Comparison of Three SVPWM StrategiesDocument5 pagesComparison of Three SVPWM Strategiesఅనిల్ కుమార్ రాజగిరిPas encore d'évaluation
- Identifying Software Project Risks - An International Delphi Study PDFDocument33 pagesIdentifying Software Project Risks - An International Delphi Study PDFaditya_chandra_25Pas encore d'évaluation
- Flexible Mode Bridgeless Boost PFC Rectifier Achieves High EfficiencyDocument3 pagesFlexible Mode Bridgeless Boost PFC Rectifier Achieves High EfficiencyBrightworld ProjectsPas encore d'évaluation
- Traction Motor DesignDocument11 pagesTraction Motor DesignS.m. FerdousPas encore d'évaluation
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatPas encore d'évaluation
- Collaborative Robots Comparison Chart - Collaborative Robotics TrendsDocument3 pagesCollaborative Robots Comparison Chart - Collaborative Robotics TrendsKanna MonishPas encore d'évaluation
- Mid Drive Vs HubDocument15 pagesMid Drive Vs HubRivan PamungkasPas encore d'évaluation
- UL 1564 SUN Rev 8 25 2020 ED 8 25 2022Document3 pagesUL 1564 SUN Rev 8 25 2020 ED 8 25 2022Joshua JonesPas encore d'évaluation
- Installation Instructions - 4.5" Murphy LevelGaugeDocument4 pagesInstallation Instructions - 4.5" Murphy LevelGaugebmdickeyPas encore d'évaluation
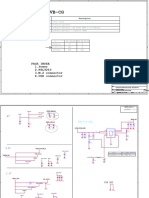
- RTL9210-VB-CG Demo V203 PDFDocument5 pagesRTL9210-VB-CG Demo V203 PDFCenusa MihaiPas encore d'évaluation
- PMAC Whitepaper PDFDocument15 pagesPMAC Whitepaper PDFIFeLisTigrisPas encore d'évaluation
- Automation Studio One-Line Electrotechnical GuideDocument69 pagesAutomation Studio One-Line Electrotechnical GuideAlexandre Marchiote100% (1)
- Isolation Transformers Reduce Drive Neutral Point VoltageDocument5 pagesIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111Pas encore d'évaluation
- An-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Document14 pagesAn-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Herry WijayaPas encore d'évaluation
- BLDCDocument4 pagesBLDCsathishPas encore d'évaluation
- Pic16f72 3 Phase Motor ControlDocument18 pagesPic16f72 3 Phase Motor ControlMatias BerriosPas encore d'évaluation
- Advanced Speed Control Techniques of Brushless DC MotorDocument17 pagesAdvanced Speed Control Techniques of Brushless DC Motorsrinupid100% (1)
- Tutorial 4Document3 pagesTutorial 4snoozermanPas encore d'évaluation
- Control of Electrical Machines Drives PDFDocument3 pagesControl of Electrical Machines Drives PDFM Kashif JunaidPas encore d'évaluation
- High Performance Cooling of Traction BrushlessDocument96 pagesHigh Performance Cooling of Traction BrushlessdftghsPas encore d'évaluation
- 4 20ma ConverterDocument159 pages4 20ma Converteradilson.krommePas encore d'évaluation
- DASBAENFTP62UDocument540 pagesDASBAENFTP62UAlexandre MarchiotePas encore d'évaluation
- DSPDocument77 pagesDSPVikas YadavPas encore d'évaluation
- Lec9 - Basics of Electric Drives - IMDocument10 pagesLec9 - Basics of Electric Drives - IMTeofilo DedietroPas encore d'évaluation
- Ata 24Document9 pagesAta 24Prince AbbasPas encore d'évaluation
- Thermal Mass Flow Controller Scaling RelationsDocument13 pagesThermal Mass Flow Controller Scaling Relationsccwang100% (1)
- Review On Field Oriented Control of Indu PDFDocument12 pagesReview On Field Oriented Control of Indu PDFSHADAB SYEDPas encore d'évaluation
- Electronics 1 Lab Manual PDFDocument30 pagesElectronics 1 Lab Manual PDFAnonymous 7y7TeR0% (1)
- DCS800 Rebuilt KitDocument66 pagesDCS800 Rebuilt KitCharoon SuriyawichitwongPas encore d'évaluation
- Motion Control SolutionsDocument19 pagesMotion Control SolutionskurtulmamisPas encore d'évaluation
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngPas encore d'évaluation
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- TIAPortalOpennessenUS en USDocument278 pagesTIAPortalOpennessenUS en USrmorenodx4587Pas encore d'évaluation
- Acceptance Conditions and Acceptance TestsDocument32 pagesAcceptance Conditions and Acceptance TestsManoj SinghPas encore d'évaluation
- BLDC Motor Control ANfpgaDocument8 pagesBLDC Motor Control ANfpgasraamu2k55068100% (1)
- Rohm Lathe ChucksDocument91 pagesRohm Lathe ChucksNebojša ObradovićPas encore d'évaluation
- 1.1 Introduction To Buck ConverterDocument44 pages1.1 Introduction To Buck Converterapi-19810277Pas encore d'évaluation
- Application of Brushless DC Motor in MilitaryDocument10 pagesApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- Notes For Electrical Fundamental 2 Rev01 - Vol 3Document45 pagesNotes For Electrical Fundamental 2 Rev01 - Vol 3Irfan ZaidiPas encore d'évaluation
- Jim Williams An04Document8 pagesJim Williams An04MartinPas encore d'évaluation
- Types and Applications of Traction MotorsDocument8 pagesTypes and Applications of Traction MotorsShrestha Sanju100% (1)
- Sensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverDocument7 pagesSensorless Speed and Flux Control Scheme For An Induction Motor With An Adaptive Backstepping ObserverWalid AbidPas encore d'évaluation
- Designing Planar Magnetics DixonDocument26 pagesDesigning Planar Magnetics Dixonarulsrini77Pas encore d'évaluation
- HPED Assignment 2: DC DrivesDocument4 pagesHPED Assignment 2: DC DrivesShadPas encore d'évaluation
- Memo - Saudi Council of Engineers MembershipDocument5 pagesMemo - Saudi Council of Engineers MembershipRiaz AhmadPas encore d'évaluation
- Damping Hibrid Stepper MotorDocument8 pagesDamping Hibrid Stepper MotorMake_PicPas encore d'évaluation
- Automation in Water Treatment Plant SystemsDocument67 pagesAutomation in Water Treatment Plant SystemsDonneil Frederiche Ong YabutPas encore d'évaluation
- DC Motor Speed Control MethodsDocument16 pagesDC Motor Speed Control MethodsmrsploogePas encore d'évaluation
- Two-Stage H-Bridge Transformer Coupled DC-DC Converter With Zero Voltage SwitchingDocument8 pagesTwo-Stage H-Bridge Transformer Coupled DC-DC Converter With Zero Voltage SwitchingRakeshconclavePas encore d'évaluation
- HP6255A Service ManualDocument95 pagesHP6255A Service Manualk6mayPas encore d'évaluation
- TamagawaDocument35 pagesTamagawadfu5346Pas encore d'évaluation
- Pneumatic Note UNIT 4Document12 pagesPneumatic Note UNIT 4Syazrin Aklili Ab RahmanPas encore d'évaluation
- PID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper MotorsDocument4 pagesPID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper Motorsprateek agarwalPas encore d'évaluation
- Upgrading Embedded Design Firmware Via USBDocument5 pagesUpgrading Embedded Design Firmware Via USBreemaroy08100% (1)
- Wireless Remote Control With Capacitive SensingDocument6 pagesWireless Remote Control With Capacitive Sensingmatthewconnor9100% (3)
- Using Springs As Capsense TM Sensors An44999 12Document6 pagesUsing Springs As Capsense TM Sensors An44999 12reemaroy08100% (1)
- Communication 1 Wire User Modules Introduction An2166 12Document8 pagesCommunication 1 Wire User Modules Introduction An2166 12reemaroy08100% (2)
- The Failure Mode and Effect Analysis Fmea Implementation For CSD An17582 12Document7 pagesThe Failure Mode and Effect Analysis Fmea Implementation For CSD An17582 12reemaroy08Pas encore d'évaluation
- Wireless Remote Control With Capacitive SensingDocument6 pagesWireless Remote Control With Capacitive Sensingmatthewconnor9100% (3)
- Sensing - Proximity Sensing Using PIRDocument7 pagesSensing - Proximity Sensing Using PIRreemaroy08100% (3)
- Capacitive Sensing Techniques and ConsiderationsDocument7 pagesCapacitive Sensing Techniques and Considerationsreemaroy08100% (3)
- Universal JointDocument17 pagesUniversal Jointakmalzuhri96Pas encore d'évaluation
- Protect transformers from over excitation with relay coordinationDocument7 pagesProtect transformers from over excitation with relay coordinationAnonymous zxtBoTT100% (1)
- SuppositoriesDocument66 pagesSuppositoriesSolomonPas encore d'évaluation
- Bimbel 2Document6 pagesBimbel 2Wibowo Sugandi, S.T.Pas encore d'évaluation
- "How To" Manual: Heat PumpsDocument15 pages"How To" Manual: Heat PumpsKarbonKale100% (3)
- MAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015Document7 pagesMAGNA START - New Generation Slip-Ring Motor Starter: December 5, 2015udhayPas encore d'évaluation
- DemodulatorsDocument2 pagesDemodulatorskhalidPas encore d'évaluation
- DIP Lecture9Document11 pagesDIP Lecture9Dilbag SinghPas encore d'évaluation
- Speaker TOADocument4 pagesSpeaker TOASenoPati KudusPas encore d'évaluation
- Azenabor - Oruka's Philosophic SagacityDocument18 pagesAzenabor - Oruka's Philosophic SagacityestifanostzPas encore d'évaluation
- Structure Design Calculation SheetDocument5 pagesStructure Design Calculation SheetifyPas encore d'évaluation
- Paper Test Critical ThinkingDocument10 pagesPaper Test Critical Thinkingandrea217Pas encore d'évaluation
- Humanities - The World We Live in - Geography Handout 1Document18 pagesHumanities - The World We Live in - Geography Handout 1denny_sitorusPas encore d'évaluation
- SpO2 and Temp Monitoring FinalDocument39 pagesSpO2 and Temp Monitoring FinalWaltas KariukiPas encore d'évaluation
- Digital Logic GatesDocument41 pagesDigital Logic Gatessurafel5248Pas encore d'évaluation
- Linear Algebra and its Applications: Functions of a matrix and Krylov matrices聻Document16 pagesLinear Algebra and its Applications: Functions of a matrix and Krylov matrices聻krrrPas encore d'évaluation
- Weekly Home Learning Plan Gen MathDocument2 pagesWeekly Home Learning Plan Gen MathLeizel Jane LjPas encore d'évaluation
- Assessment of Water Resources Pollution Associated With Mining ActivityDocument13 pagesAssessment of Water Resources Pollution Associated With Mining ActivityVictor Gallo RamosPas encore d'évaluation
- Basic Electrical Engineering - A. Mittle and V. N. Mittle PDFDocument212 pagesBasic Electrical Engineering - A. Mittle and V. N. Mittle PDFSajal Singh Patel0% (5)
- Slot18 2D Graphics ImagesDocument23 pagesSlot18 2D Graphics ImagesHuy KunnPas encore d'évaluation
- P5 - Gate Estimate:-: Description L B D/H Quantity Unit Rate Amount For One Gate NosDocument3 pagesP5 - Gate Estimate:-: Description L B D/H Quantity Unit Rate Amount For One Gate Nosanon_769074129Pas encore d'évaluation
- THE SAP® Business One Software Development Kit: SAP Functions in DetailDocument24 pagesTHE SAP® Business One Software Development Kit: SAP Functions in DetailPaolo MinguzziPas encore d'évaluation
- T238 Digital Trigger UnitDocument5 pagesT238 Digital Trigger UnitGuilherme SousaPas encore d'évaluation
- Galaxy Dimension Installation Manual 1.0Document306 pagesGalaxy Dimension Installation Manual 1.0thailannaPas encore d'évaluation
- Evolution of Mobile Base Station ArchitecturesDocument6 pagesEvolution of Mobile Base Station ArchitecturesShivganesh SomasundaramPas encore d'évaluation
- Yield Management and ForecastingDocument23 pagesYield Management and ForecastingMandeep KaurPas encore d'évaluation
- Introduction To C Programming: S.V.Jansi RaniDocument14 pagesIntroduction To C Programming: S.V.Jansi RanisudhanPas encore d'évaluation
- Applications of Linear Algebra in EngineeringDocument5 pagesApplications of Linear Algebra in EngineeringArtemisPas encore d'évaluation
- Grammar BasicsDocument24 pagesGrammar Basicspreetie1027Pas encore d'évaluation
- Human ActivityDocument53 pagesHuman ActivityabiramanPas encore d'évaluation