Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Data Sheet (English) - 8036 Industrial ControlsDocument44 pagesData Sheet (English) - 8036 Industrial ControlsNabil ShaukatPas encore d'évaluation
- Form I Integrated Science End of Year ExamDocument10 pagesForm I Integrated Science End of Year ExamMiss Rambaran100% (2)
- Pneumaticshandout NewDocument8 pagesPneumaticshandout NewSRIREKHAPas encore d'évaluation
- Indian EpicsDocument8 pagesIndian EpicsSRIREKHAPas encore d'évaluation
- Handout Basic Electrical and Electronics AllisonDocument6 pagesHandout Basic Electrical and Electronics AllisonSRIREKHAPas encore d'évaluation
- Electropneumatics Tasks Basic LevelDocument10 pagesElectropneumatics Tasks Basic LevelSRIREKHAPas encore d'évaluation
- Latest Tecnology in ComputersDocument2 pagesLatest Tecnology in ComputersSRIREKHAPas encore d'évaluation
- PneumaticsDocument38 pagesPneumaticsSRIREKHAPas encore d'évaluation
- Electropneumatics Tasks Basic LevelDocument10 pagesElectropneumatics Tasks Basic LevelSRIREKHAPas encore d'évaluation
- Panchayat RajDocument12 pagesPanchayat RajSRIREKHAPas encore d'évaluation
- What Is MatterDocument131 pagesWhat Is MatterSRIREKHAPas encore d'évaluation
- Semiconductors BasicsDocument6 pagesSemiconductors BasicsSRIREKHAPas encore d'évaluation
- 7 Quality Control ToolsDocument154 pages7 Quality Control ToolsKAMAL BEHL71% (7)
- A Gas Compressor Is A Mechanical Device That Increases The Pressure of A Gas by Reducing Its VolumeDocument8 pagesA Gas Compressor Is A Mechanical Device That Increases The Pressure of A Gas by Reducing Its VolumeSRIREKHA100% (1)
- LM 3900Document16 pagesLM 3900Fredy CasillaPas encore d'évaluation
- Fundamental Behavior of FireDocument1 pageFundamental Behavior of FireirfanPas encore d'évaluation
- Thermal Power Plant: " " NTPC (Dadri)Document17 pagesThermal Power Plant: " " NTPC (Dadri)Kulvinder SinghPas encore d'évaluation
- BHELDocument38 pagesBHELSharath Chandra100% (1)
- cv5788987 FileDocument5 pagescv5788987 FileAbdul SaquibPas encore d'évaluation
- Effect of Clearance On Volumetric Efficiency in 2D Piston PumpsDocument12 pagesEffect of Clearance On Volumetric Efficiency in 2D Piston PumpsSiddharth SinghPas encore d'évaluation
- History of Pneumatics: A 38-year EvolutionDocument2 pagesHistory of Pneumatics: A 38-year EvolutionJean Claude ArizaPas encore d'évaluation
- Techniques de Commande Des Machines Electriques - Cours Et Problèmes..Document2 pagesTechniques de Commande Des Machines Electriques - Cours Et Problèmes..Tko ToolPas encore d'évaluation
- Water Wash Procedure For EconomizerDocument3 pagesWater Wash Procedure For EconomizerRajendra100% (1)
- 9 - Free Point and Backoff - (Houston)Document29 pages9 - Free Point and Backoff - (Houston)Usama Bin Sabir100% (2)
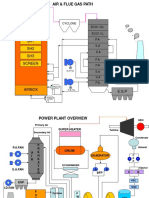
- Air & Flue Gas Path CFBCDocument2 pagesAir & Flue Gas Path CFBCJAY PARIKHPas encore d'évaluation
- Nonequilibrium Statistical MechanicsDocument299 pagesNonequilibrium Statistical MechanicsKshitij LauriaPas encore d'évaluation
- Aeroshell Ascender: Performance, Features & Benefits Main ApplicationsDocument3 pagesAeroshell Ascender: Performance, Features & Benefits Main ApplicationsRicardo LacskoPas encore d'évaluation
- Module 2Document79 pagesModule 2uditPas encore d'évaluation
- List of Licensed Wholesale Operators As of Dec 16 2Document3 pagesList of Licensed Wholesale Operators As of Dec 16 2Tumsifu SiaoPas encore d'évaluation
- Numerical Study of The Unsteady Aerodynamics of Rotating SeedsDocument6 pagesNumerical Study of The Unsteady Aerodynamics of Rotating SeedsademargcjuniorPas encore d'évaluation
- Small, High Efficiency, Recuperated Ceramic Turboshaft EngineDocument1 pageSmall, High Efficiency, Recuperated Ceramic Turboshaft EngineU.S. Naval Research LaboratoryPas encore d'évaluation
- Vdocuments - MX - Api 612 Latest Edition 612 Latest Editionpdf Free Download Here Api Standard PDFDocument2 pagesVdocuments - MX - Api 612 Latest Edition 612 Latest Editionpdf Free Download Here Api Standard PDFNeeraj JangidPas encore d'évaluation
- ATSDocument8 pagesATSserban_elPas encore d'évaluation
- Parts Crane Hitachi FK600 - PRDocument2 pagesParts Crane Hitachi FK600 - PRDefly Gusti100% (1)
- Rr312003 Turbo MachineryDocument8 pagesRr312003 Turbo MachinerySrinivasa Rao GPas encore d'évaluation
- Aplicaciones Con El Ne - 558Document5 pagesAplicaciones Con El Ne - 558julio_m_pPas encore d'évaluation
- GM ST 382B 85 1985 Light Duty Truck CKGP Series Service Manual 1984 Revision PagesDocument55 pagesGM ST 382B 85 1985 Light Duty Truck CKGP Series Service Manual 1984 Revision PagesBrian NormanPas encore d'évaluation
- Fly Ash Soil Blocks PDFDocument42 pagesFly Ash Soil Blocks PDFTahir KhalidPas encore d'évaluation
- 2013 - S2E Technical and Technological - Intro - Final PDFDocument28 pages2013 - S2E Technical and Technological - Intro - Final PDFJose Kirby100% (1)
- About The AuthorsDocument1 pageAbout The AuthorsArthur CostaPas encore d'évaluation
- Seismic Acquisition and Processing BWDocument33 pagesSeismic Acquisition and Processing BWghassen laouiniPas encore d'évaluation
- Effectiveness of Sootblowers in Boilers Thermal Power StationDocument7 pagesEffectiveness of Sootblowers in Boilers Thermal Power Stationdillipsh123Pas encore d'évaluation