Vous aimerez peut-être aussi
- Anexo Andamios (1) .PDF (Certificado Ce)Document4 pagesAnexo Andamios (1) .PDF (Certificado Ce)Marco FossatiPas encore d'évaluation
- Conjuros Clerigo Nivel 2Document2 pagesConjuros Clerigo Nivel 2Nicolàs Temachtiani Aranda AlvarezPas encore d'évaluation
- Diptico 2018 PDFDocument1 pageDiptico 2018 PDFTony LeoPas encore d'évaluation
- Costos Ii Plan de TrabajoDocument15 pagesCostos Ii Plan de TrabajoYemz RayónPas encore d'évaluation
- Tipos de Duelo PatologicoDocument2 pagesTipos de Duelo PatologicoKarla Molina GarciaPas encore d'évaluation
- Actividad 5Document3 pagesActividad 5Javier a la TorresPas encore d'évaluation
- Se Debe Enseñar El Curso de Religión en Los ColegiosDocument4 pagesSe Debe Enseñar El Curso de Religión en Los ColegiosSebastián Pacheco MuñozPas encore d'évaluation
- Tipos de ImpresorasDocument9 pagesTipos de ImpresorasافىميراندPas encore d'évaluation
- ABD - Practica 13-3Document6 pagesABD - Practica 13-3ANIBAL GONZALEZ TOVARPas encore d'évaluation
- Manual Avance Tps&Gps 1200 v5 - 0 - Es BetaDocument61 pagesManual Avance Tps&Gps 1200 v5 - 0 - Es BetaCesar RuizPas encore d'évaluation
- Semana 06 Mci CompresionDocument26 pagesSemana 06 Mci CompresionCristian Rey SanchezPas encore d'évaluation
- Certamen 1 - MAT022 (2016-Abril)Document6 pagesCertamen 1 - MAT022 (2016-Abril)Jorge PeraltaPas encore d'évaluation
- Configuración Rectificador e Integración Baterías de Litio - Nodo - Transporte - Claro Project Fitel - V1Document33 pagesConfiguración Rectificador e Integración Baterías de Litio - Nodo - Transporte - Claro Project Fitel - V1Roger Alfaro GuevaraPas encore d'évaluation
- Comunicacion LedesmaDocument19 pagesComunicacion Ledesmamaria candelaria tito100% (5)
- Informe - Activaciones Especiales Polvo Magnético - UCCVCDFDocument2 pagesInforme - Activaciones Especiales Polvo Magnético - UCCVCDFlujanPas encore d'évaluation
- Guia de Aprendizaje UML ADSIDocument13 pagesGuia de Aprendizaje UML ADSIJhon Sanchez MurilloPas encore d'évaluation
- S2 - Práctica de Laboratorio 19 - Restauración Del Sistema en Windows 8Document11 pagesS2 - Práctica de Laboratorio 19 - Restauración Del Sistema en Windows 8Rolando E Guzman NPas encore d'évaluation
- FBC070206PP9: Fuller Beauty Cosmetics Trainee S.de RDocument1 pageFBC070206PP9: Fuller Beauty Cosmetics Trainee S.de RjorgePas encore d'évaluation
- Tarea de IntroducionDocument8 pagesTarea de IntroducionCarlos MarmolejoPas encore d'évaluation
- Categorización Ambiental de Los Hogares de Costa Rica PDFDocument176 pagesCategorización Ambiental de Los Hogares de Costa Rica PDFSilvia Soto CordobaPas encore d'évaluation
- Silabo PPP Ciclo 2022-IDocument7 pagesSilabo PPP Ciclo 2022-ISayuri EsquénPas encore d'évaluation
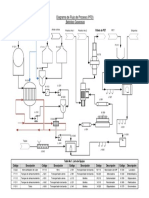
- Diagrama Bebidas GaseosasDocument1 pageDiagrama Bebidas GaseosasJorgePas encore d'évaluation
- DOC. DE FIN DE AÑO-INFORMES FINALES-2021-leidDocument13 pagesDOC. DE FIN DE AÑO-INFORMES FINALES-2021-leidLeidy AscencioPas encore d'évaluation
- Prevencion y Control de Incendios Extintores 2Document47 pagesPrevencion y Control de Incendios Extintores 2joselynortizleyvaPas encore d'évaluation
- Comportamiento Del ConsumidorDocument13 pagesComportamiento Del Consumidoroctavio cruz escobarPas encore d'évaluation
- Ensayo - La Forma en Diseño GráficoDocument2 pagesEnsayo - La Forma en Diseño GráficoJohan InfantePas encore d'évaluation
- Seminario Del Dolor e InflamaciónDocument26 pagesSeminario Del Dolor e InflamaciónGabriela Loú GomezPas encore d'évaluation
- Listado de Venta Bienes Adquiridos CajaDeAhorros 2Document10 pagesListado de Venta Bienes Adquiridos CajaDeAhorros 2Leonora Elizabeth Miranda FloresPas encore d'évaluation
- Dyce - RolesDocument1 pageDyce - RoleskatherinePas encore d'évaluation
- Secadores FD PDFDocument12 pagesSecadores FD PDFAdolfo LeonPas encore d'évaluation