Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Chapter Iii: Ballistic MissilesDocument8 pagesChapter Iii: Ballistic MissilesGiri PrasadPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Three-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsDocument11 pagesThree-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsGiri PrasadPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Total Strength of Responder Response YesDocument3 pagesTotal Strength of Responder Response YesGiri PrasadPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Ballistic Missile Track Initiation From Satellite ObservationsDocument18 pagesBallistic Missile Track Initiation From Satellite ObservationsGiri PrasadPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- 2f5b5radar Numerical IIDocument2 pages2f5b5radar Numerical IIGiri PrasadPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- BHM 303 Managerial EconomicsDocument131 pagesBHM 303 Managerial EconomicsGiri PrasadPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 6a55daided Ins - TercomDocument5 pages6a55daided Ins - TercomGiri PrasadPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- MissileDocument67 pagesMissileGiri PrasadPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Aeronautics: Parts of An Airplane and Their FunctionsDocument4 pagesAeronautics: Parts of An Airplane and Their FunctionsGiri PrasadPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Aeronautics: Parts of An Airplane and Their FunctionsDocument4 pagesAeronautics: Parts of An Airplane and Their FunctionsGiri PrasadPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- 3.1 Why Boolean Algebra?Document18 pages3.1 Why Boolean Algebra?Giri PrasadPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Department of Ece, Adhiparasakthi College of Engineering, KalavaiDocument31 pagesDepartment of Ece, Adhiparasakthi College of Engineering, KalavaiGiri PrasadPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- IKI10201 04b-Simplification of Boolean Functions: Bobby Nazief Semester-I 2005 - 2006Document16 pagesIKI10201 04b-Simplification of Boolean Functions: Bobby Nazief Semester-I 2005 - 2006Giri PrasadPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- VocabularlyDocument5 pagesVocabularlyGiri PrasadPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Were Does Price Come From? Equilibrium: Name of InstitutionDocument9 pagesWere Does Price Come From? Equilibrium: Name of InstitutionGiri PrasadPas encore d'évaluation
- 4 FF 82 DBMS2Document13 pages4 FF 82 DBMS2Giri PrasadPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
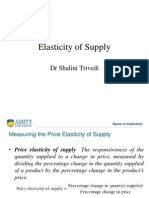
- Elasticity of Supply: DR Shalini TrivediDocument7 pagesElasticity of Supply: DR Shalini TrivediGiri PrasadPas encore d'évaluation
- ACS350 Technical CatalogueDocument20 pagesACS350 Technical CatalogueJPas encore d'évaluation
- MclustDocument57 pagesMclustfilip_nenadicPas encore d'évaluation
- MIT 18.05 Exam 1 SolutionsDocument7 pagesMIT 18.05 Exam 1 SolutionsGoAwayScribdlolPas encore d'évaluation
- Dashboards Help FileDocument127 pagesDashboards Help FilerameshvarkutiPas encore d'évaluation
- Study of Advanced Current Control Strategies For Three-Phase Grid-Connected PWM Inverters For Distributed GenerationDocument6 pagesStudy of Advanced Current Control Strategies For Three-Phase Grid-Connected PWM Inverters For Distributed Generationapi-3826450100% (2)
- Flare June July 2009Document102 pagesFlare June July 2009khan_b66Pas encore d'évaluation
- Career Planning Resources - 2021-22Document1 pageCareer Planning Resources - 2021-22Jessica NulphPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Interview Qs On r12 p2pDocument15 pagesInterview Qs On r12 p2pAmitPradhanPas encore d'évaluation
- Tugas 2 - Frame of Thinking - Muhammad IhsanDocument10 pagesTugas 2 - Frame of Thinking - Muhammad IhsanMuhammad IhsanPas encore d'évaluation
- PHP MySQLDocument85 pagesPHP MySQLDevendraPas encore d'évaluation
- Fido Jan20 - 2023 2587774662Document10 pagesFido Jan20 - 2023 2587774662Joel Paulose varghese100% (1)
- Java Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runDocument12 pagesJava Code Examples Org - Springframework.batch - Core.launch - Joblauncher.runBala KulandaiPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Allen Kyle ResumeDocument2 pagesAllen Kyle ResumeJB July SantanderPas encore d'évaluation
- Lecture Note Unit 1-4Document54 pagesLecture Note Unit 1-4birtukan aregaPas encore d'évaluation
- Tally Prime Course Account and IntroDocument15 pagesTally Prime Course Account and IntroAnkit Singh100% (1)
- CourseOfferingPlanGradF18 S20 20180106Document9 pagesCourseOfferingPlanGradF18 S20 20180106Anshum PalPas encore d'évaluation
- FAR 23 Loads BrochureDocument2 pagesFAR 23 Loads BrochureDoor URPas encore d'évaluation
- Ame Relay LabDocument6 pagesAme Relay LabasegunloluPas encore d'évaluation
- CommunityHelpersJobsProfessionsFlashcardsFREEFREEBIE 1 PDFDocument27 pagesCommunityHelpersJobsProfessionsFlashcardsFREEFREEBIE 1 PDFLorena DominguezPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Downloads Pqsine S 1 16 16Document1 pageDownloads Pqsine S 1 16 16SANDRO RAUL HUAMANI PIZARROPas encore d'évaluation
- KeralaDocument514 pagesKeralaGayathriPas encore d'évaluation
- Form 15: Name of Member 1Document2 pagesForm 15: Name of Member 1FSADFPas encore d'évaluation
- SAA1054Document14 pagesSAA1054partho mondolPas encore d'évaluation
- Beluru Sudarshana Profile in BriefDocument1 pageBeluru Sudarshana Profile in BriefbeluruPas encore d'évaluation
- UMC Series - Driver ReadMe - 2019 04 02 PDFDocument3 pagesUMC Series - Driver ReadMe - 2019 04 02 PDFLeo Do Monte0% (1)
- Dd306 ManualDocument20 pagesDd306 Manualtiendat202Pas encore d'évaluation
- Crash - Log - 2023 04 01 22 36 07Document2 pagesCrash - Log - 2023 04 01 22 36 07Aizen HamburgerPas encore d'évaluation
- Plug in DevelopmentDocument46 pagesPlug in DevelopmentJean claude onanaPas encore d'évaluation
- Solutions To Selected Problems-Duda, HartDocument12 pagesSolutions To Selected Problems-Duda, HartTiep VuHuu67% (3)
- 15 SO2 Curs-06 Kernel DebuggingDocument39 pages15 SO2 Curs-06 Kernel DebuggingAlla MstislavPas encore d'évaluation