Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Firearms in America 1600 - 1899Document310 pagesFirearms in America 1600 - 1899Mike100% (3)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- ATPL OXFORD EnginesDocument472 pagesATPL OXFORD Enginesccoyure93% (15)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Fiesta Mk6 EnglishDocument193 pagesFiesta Mk6 EnglishStoicaAlexandru100% (2)
- Ata 72 CF6-80C2Document19 pagesAta 72 CF6-80C2ccoyure100% (4)
- Human FactorsDocument126 pagesHuman Factorsccoyure100% (1)
- B767 Ata 70 80Document205 pagesB767 Ata 70 80ccoyure100% (2)
- Ata 80 CF6-80C2Document8 pagesAta 80 CF6-80C2ccoyure100% (1)
- Ata 79 CF6-80C2Document19 pagesAta 79 CF6-80C2ccoyure100% (1)
- Applichem Case-SCM Sec B Group-2Document11 pagesApplichem Case-SCM Sec B Group-2Ayush RanjanPas encore d'évaluation
- Centaour 50 Solar TurbineDocument2 pagesCentaour 50 Solar TurbineTifano KhristiyantoPas encore d'évaluation
- Ata 71 CF6-80C2Document28 pagesAta 71 CF6-80C2ccoyure100% (1)
- High Impact Presentation SkillsDocument5 pagesHigh Impact Presentation SkillsMohd AqminPas encore d'évaluation
- Python Lab ManualDocument25 pagesPython Lab ManualMohd TahirPas encore d'évaluation
- Ata 74 CF6-80C2Document9 pagesAta 74 CF6-80C2ccoyure100% (1)
- GE Performance Monitoring PDFDocument11 pagesGE Performance Monitoring PDFant29539432Pas encore d'évaluation
- Assessment of Learning 1 Quiz 1Document3 pagesAssessment of Learning 1 Quiz 1imalwaysmarked100% (4)
- Ata 75 CF6-80C2Document14 pagesAta 75 CF6-80C2ccoyure100% (2)
- Ata 73 CF6-80C2Document38 pagesAta 73 CF6-80C2ccoyure100% (1)
- Topic 10 - Advanced Approvals in Salesforce CPQDocument18 pagesTopic 10 - Advanced Approvals in Salesforce CPQRamkumar Poovalai100% (1)
- Slag Pot DesignDocument2 pagesSlag Pot Designnitesh1mishra100% (2)
- Ata 78 CF6-80C2Document29 pagesAta 78 CF6-80C2ccoyure100% (1)
- Ata 76 CF6-80C2Document7 pagesAta 76 CF6-80C2ccoyure100% (2)
- Lec-06 TurbomachineryDocument19 pagesLec-06 TurbomachineryccoyurePas encore d'évaluation
- CfiDocument16 pagesCficcoyurePas encore d'évaluation
- Engine 4 StrokeDocument16 pagesEngine 4 Strokeelsoukkary100% (2)
- Turbomachinery AerodynamicsDocument21 pagesTurbomachinery AerodynamicsbunnykfaPas encore d'évaluation
- Axial Load Distribution in A Jet Engine Spline Coupling: Justin McgrathDocument14 pagesAxial Load Distribution in A Jet Engine Spline Coupling: Justin McgrathccoyurePas encore d'évaluation
- FM 1-506 PDFDocument142 pagesFM 1-506 PDFMariana TatarchukPas encore d'évaluation
- Vol Ii-4Document60 pagesVol Ii-4ccoyurePas encore d'évaluation
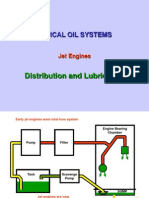
- Typical Oil Systems: Distribution and LubricationDocument8 pagesTypical Oil Systems: Distribution and LubricationccoyurePas encore d'évaluation
- Aircraft Dynamic ModesDocument5 pagesAircraft Dynamic ModesccoyurePas encore d'évaluation
- Propeller Control Unit (PCU) Operation: Constant Speeding Variable Pitch Propeller SystemDocument21 pagesPropeller Control Unit (PCU) Operation: Constant Speeding Variable Pitch Propeller SystemccoyurePas encore d'évaluation
- Concrete Construction Article PDF - Site Casting Exposed Aggregate WallsDocument1 pageConcrete Construction Article PDF - Site Casting Exposed Aggregate WallssonofalexanderPas encore d'évaluation
- Esu Tester WhoDocument5 pagesEsu Tester WhoquezonPas encore d'évaluation
- UVIDocument2 pagesUVIسلطان ابوالعلاPas encore d'évaluation
- RSC 406 (English)Document11 pagesRSC 406 (English)Tuấn DũngPas encore d'évaluation
- Bus Bar Schemes: Submitted By: Under Guidance ofDocument26 pagesBus Bar Schemes: Submitted By: Under Guidance ofHumeraPas encore d'évaluation
- Dana Trailer Suspension: SpicerDocument14 pagesDana Trailer Suspension: SpicerCarlos Manuel Vazquez SanchezPas encore d'évaluation
- The Organization & Structure of Banks & Their IndustryDocument19 pagesThe Organization & Structure of Banks & Their Industryrachim04Pas encore d'évaluation
- Week 11b ViewsDocument26 pagesWeek 11b ViewsKenanPas encore d'évaluation
- HR Report ON Moser BaerDocument77 pagesHR Report ON Moser BaerKomal DhaliwalPas encore d'évaluation
- MKDM Gyan KoshDocument17 pagesMKDM Gyan KoshSatwik PandaPas encore d'évaluation
- Shivani Singhal: Email: PH: 9718369255Document4 pagesShivani Singhal: Email: PH: 9718369255ravigompaPas encore d'évaluation
- Samtec ASP 134488 01 DatasheetDocument4 pagesSamtec ASP 134488 01 DatasheetamiteshtripathiPas encore d'évaluation
- CYMTCC For Windows: User's Guide and Reference ManualDocument290 pagesCYMTCC For Windows: User's Guide and Reference ManualJosselynGalloMuñozPas encore d'évaluation
- Operating System ComponentsDocument59 pagesOperating System ComponentsJikku VarUghesePas encore d'évaluation
- Diagram of Vitamix Blade Blade Assembly: InstructionsDocument5 pagesDiagram of Vitamix Blade Blade Assembly: InstructionsRenato PurcinoPas encore d'évaluation
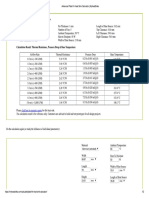
- Advanced Plate Fin Heat Sink Calculator - MyHeatSinksDocument2 pagesAdvanced Plate Fin Heat Sink Calculator - MyHeatSinksHarsh BhardwajPas encore d'évaluation
- Rotork: Product TrainingDocument4 pagesRotork: Product TraininghieuPas encore d'évaluation
- CV Product C-EtdDocument6 pagesCV Product C-EtdmrmskymanPas encore d'évaluation
- 2008 Residential CF-1R ADDDocument8 pages2008 Residential CF-1R ADDDebo SodipoPas encore d'évaluation
- MT Company PresentationDocument30 pagesMT Company Presentationjose manuelPas encore d'évaluation
- XDocument20 pagesXAlberto BarrosPas encore d'évaluation