Vous aimerez peut-être aussi
- Advanced Mechatronics Homework 2Document3 pagesAdvanced Mechatronics Homework 2Zach Ricci-Braum100% (1)
- Gen Func Protek B-810Document25 pagesGen Func Protek B-810scremohentaiPas encore d'évaluation
- TM4112 - 12 History MatchingDocument87 pagesTM4112 - 12 History MatchingRay YudaPas encore d'évaluation
- Catalogue OptacomDocument48 pagesCatalogue OptacommooninjaPas encore d'évaluation
- Air Handling Unit Construction Checklist: Project: Date: AHU Tag: Building: LocationDocument6 pagesAir Handling Unit Construction Checklist: Project: Date: AHU Tag: Building: LocationGopinath GopiPas encore d'évaluation
- Manual Pat Rt540 Iflex5Document79 pagesManual Pat Rt540 Iflex5Dawn Hall100% (4)
- Universal CounterDocument5 pagesUniversal CounterHimanshu NegiPas encore d'évaluation
- An Freq MeasurementDocument14 pagesAn Freq MeasurementfarcasiunPas encore d'évaluation
- Time Difference MeterDocument8 pagesTime Difference MeterMike AndersonPas encore d'évaluation
- 1ef36 0eDocument4 pages1ef36 0eppPas encore d'évaluation
- Unit - 1 Digital Time Measurement Techniques: Lecture Notes # 1 Outline of The LectureDocument15 pagesUnit - 1 Digital Time Measurement Techniques: Lecture Notes # 1 Outline of The LectureNirmal Kumar PandeyPas encore d'évaluation
- Pulse Generator Programming Channel RatesDocument2 pagesPulse Generator Programming Channel RatesQuantum Composers, Inc.Pas encore d'évaluation
- Making Accurate Frequency Measurements - National InstrumentsDocument4 pagesMaking Accurate Frequency Measurements - National Instrumentschatty85Pas encore d'évaluation
- Es1107 Assignment-01Document6 pagesEs1107 Assignment-01K. BHANU PRAKASH REDDYPas encore d'évaluation
- Difference Between Calibration, Testing and Validation: Accuracy, Precision, Resolution & SensitivityDocument27 pagesDifference Between Calibration, Testing and Validation: Accuracy, Precision, Resolution & SensitivityAmit NainPas encore d'évaluation
- Digital Voltmeters Can Be Classified in To The Following Broad CategoriesDocument22 pagesDigital Voltmeters Can Be Classified in To The Following Broad CategoriesSysu KumarPas encore d'évaluation
- User Manual For Electromagnetic Flowmeter Transmitter PCB BoardDocument28 pagesUser Manual For Electromagnetic Flowmeter Transmitter PCB BoardBelos SahajiPas encore d'évaluation
- Frequency CounterDocument12 pagesFrequency CounterArun Muthu Chelvan100% (1)
- Calibration of Eddycon CL - ENGDocument36 pagesCalibration of Eddycon CL - ENGNathaniel LuraPas encore d'évaluation
- Precise Measurement FaqsDocument9 pagesPrecise Measurement FaqsOmar SaadiqPas encore d'évaluation
- AN200 Fundamentals of Electronic CountersDocument44 pagesAN200 Fundamentals of Electronic CountersfahkingmoronPas encore d'évaluation
- Frequency MeasurementDocument6 pagesFrequency MeasurementGustavo RiosPas encore d'évaluation
- Effective Multi-Tap Transformer Measurement Using A Scanner and The 4263B LCR MeterDocument9 pagesEffective Multi-Tap Transformer Measurement Using A Scanner and The 4263B LCR MetertomichelPas encore d'évaluation
- Ortec: RatemeterDocument2 pagesOrtec: RatemeterMik QuizaPas encore d'évaluation
- 10step To A Perfect Digital DemodulationDocument16 pages10step To A Perfect Digital Demodulationbayman66Pas encore d'évaluation
- M 5625 SP PDFDocument18 pagesM 5625 SP PDFFranz Erwin Gabriel FuentesPas encore d'évaluation
- EthernetDocument16 pagesEthernetpascaruflorinPas encore d'évaluation
- Measurements and InstrumentationDocument28 pagesMeasurements and Instrumentationteam7.fypPas encore d'évaluation
- Frequency CounterDocument23 pagesFrequency CounterEng. Dr. Dennis N Mwighusa100% (2)
- Vc2000 ManualDocument4 pagesVc2000 ManualZoranPas encore d'évaluation
- Technology UniversityDocument9 pagesTechnology Universityali1999msnPas encore d'évaluation
- Functions of Digital Frequency MeterDocument3 pagesFunctions of Digital Frequency MetersruthiPas encore d'évaluation
- Barometric Pressure Measurement Using Semiconductor Pressure SensorsDocument12 pagesBarometric Pressure Measurement Using Semiconductor Pressure Sensorssoldadorx01Pas encore d'évaluation
- 53210A Data SheetDocument22 pages53210A Data SheetcciproductsPas encore d'évaluation
- Amplifier Characterization: Fundamentals of Electrical and Electronic Systems. Lab 1Document4 pagesAmplifier Characterization: Fundamentals of Electrical and Electronic Systems. Lab 1Andrea Dwight CostanzoPas encore d'évaluation
- VCO Test Methods: 1. How To Measure Output Power and FrequencyDocument4 pagesVCO Test Methods: 1. How To Measure Output Power and FrequencyDurbha RaviPas encore d'évaluation
- Fundamentals of Microwave Frequency Counters: Application Note 200-1Document20 pagesFundamentals of Microwave Frequency Counters: Application Note 200-1Darshan PatelPas encore d'évaluation
- Dual Slope AdcDocument5 pagesDual Slope AdcvishvinnyPas encore d'évaluation
- Applying Error CorrectionDocument16 pagesApplying Error CorrectionaceofspadesPas encore d'évaluation
- Q96D4 - Manual ProgramareDocument13 pagesQ96D4 - Manual ProgramareDan Alexandru NeaguPas encore d'évaluation
- Digital Frequency and Time Measuring Instruments: BY Dr. K.V.Praveen Kumar Assistant Professor, Eed, SvnitDocument35 pagesDigital Frequency and Time Measuring Instruments: BY Dr. K.V.Praveen Kumar Assistant Professor, Eed, SvnitTushar SanwareyPas encore d'évaluation
- 04 Tt2510eu01alDocument24 pages04 Tt2510eu01alaizatmaricanPas encore d'évaluation
- Use of OscilloscopeDocument13 pagesUse of Oscilloscopesonja_ŽarićPas encore d'évaluation
- Related Categories: Cart Help Login Create A User Profile. What Is Developer Zone? TutorialDocument13 pagesRelated Categories: Cart Help Login Create A User Profile. What Is Developer Zone? Tutorialpaancute8982Pas encore d'évaluation
- 9 IndexDocument25 pages9 IndexbuturcasPas encore d'évaluation
- 02 - Tester Hardware PDFDocument20 pages02 - Tester Hardware PDFdeepakPas encore d'évaluation
- N30U Service Manual For Firmware From 2 00 Rev BDocument52 pagesN30U Service Manual For Firmware From 2 00 Rev BsahidPas encore d'évaluation
- Unit-Iv: Digital Voltmeters: Text BooksDocument30 pagesUnit-Iv: Digital Voltmeters: Text BooksSave NaturePas encore d'évaluation
- PAPER EI (2) by Pankaj SirDocument247 pagesPAPER EI (2) by Pankaj SirMahesh SinghPas encore d'évaluation
- Computed Order Tracking Applied To Vibration Analysis of Rotating MachineryDocument2 pagesComputed Order Tracking Applied To Vibration Analysis of Rotating MachineryJulio Pacheco BarraPas encore d'évaluation
- The Integrating A/D Converter (ICL7135) : Application Note February 1999Document5 pagesThe Integrating A/D Converter (ICL7135) : Application Note February 1999ytnatePas encore d'évaluation
- Exploring The Benefits of Frequency Counter Circuit Working and ApplicationsDocument11 pagesExploring The Benefits of Frequency Counter Circuit Working and ApplicationsjackPas encore d'évaluation
- Automation in Digital InstrumentsDocument5 pagesAutomation in Digital InstrumentsSuhail Mohammad ZargarPas encore d'évaluation
- Low Frequency Vibration Analysis & Effects of AC CouplingDocument5 pagesLow Frequency Vibration Analysis & Effects of AC CouplingLasse HansenPas encore d'évaluation
- Calibration of ChronometersDocument13 pagesCalibration of ChronometersGustavo SánchezPas encore d'évaluation
- Swerleins AlgorithmDocument14 pagesSwerleins AlgorithmnomePas encore d'évaluation
- Barometer Mpx2100apDocument10 pagesBarometer Mpx2100apVurdalack666Pas encore d'évaluation
- Low Losses PWM For High Power Press-Pack IGBT InvertersDocument9 pagesLow Losses PWM For High Power Press-Pack IGBT InvertersMohamed BerririPas encore d'évaluation
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsD'EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsPas encore d'évaluation
- Fluke - Time - AnalyzerDocument3 pagesFluke - Time - AnalyzerpolancomarquezPas encore d'évaluation
- Johansson-Traceable Calibration of A GPS Disciplined Oscillator - ncsl00Document10 pagesJohansson-Traceable Calibration of A GPS Disciplined Oscillator - ncsl00polancomarquezPas encore d'évaluation
- Gps View 107 NewsDocument1 pageGps View 107 NewspolancomarquezPas encore d'évaluation
- Fluke - Counter - CalDocument2 pagesFluke - Counter - CalpolancomarquezPas encore d'évaluation
- Fluke - 6681phasDocument5 pagesFluke - 6681phaspolancomarquezPas encore d'évaluation
- PPM AVM-2000 AG-103-1 Noise Reduction and Filtering TechniquesDocument2 pagesPPM AVM-2000 AG-103-1 Noise Reduction and Filtering TechniquespolancomarquezPas encore d'évaluation
- FQ000009 Sward Rocker HardnessDocument2 pagesFQ000009 Sward Rocker HardnessCarlos PerezPas encore d'évaluation
- DAO 2010-23 - Revised Emission Standards For Motor Vehicles Equipped With Compression-Ignition and Spark-Ignition EnginesDocument7 pagesDAO 2010-23 - Revised Emission Standards For Motor Vehicles Equipped With Compression-Ignition and Spark-Ignition EnginesPacific SpectrumPas encore d'évaluation
- On-The-Job Calibration of A Digital Camera For Industrial ...Document6 pagesOn-The-Job Calibration of A Digital Camera For Industrial ...ianni67Pas encore d'évaluation
- Topside Innovations, Ellen Stuifbergen, RESONDocument42 pagesTopside Innovations, Ellen Stuifbergen, RESONJoost F. BoersPas encore d'évaluation
- Transpiration LabDocument13 pagesTranspiration LabkittihsiangPas encore d'évaluation
- D2168 21269Document6 pagesD2168 21269D IZomer Oyola-Guzmán100% (1)
- Measurement of TemperatureDocument44 pagesMeasurement of TemperatureShanuOlanikkalPas encore d'évaluation
- Aries Price List-18 NEWDocument12 pagesAries Price List-18 NEWPradyumna MohapatraPas encore d'évaluation
- 160 Pressure TransmitterDocument1 page160 Pressure TransmitternvkjayanthPas encore d'évaluation
- Instrumentation AssignmentDocument7 pagesInstrumentation AssignmentBereket Bersha OrkaidoPas encore d'évaluation
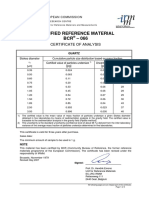
- Certified Reference Material BCR - 066: Certificate of AnalysisDocument3 pagesCertified Reference Material BCR - 066: Certificate of Analysisharry mahfuzanPas encore d'évaluation
- D88 Viscosidad SayboltDocument7 pagesD88 Viscosidad SayboltJaime AlfonsoPas encore d'évaluation
- AGA-9 Revision Draft 082403Document49 pagesAGA-9 Revision Draft 082403mathijn75Pas encore d'évaluation
- Mettler Seven2Go S2 ManualDocument40 pagesMettler Seven2Go S2 Manualzineb akroudPas encore d'évaluation
- Profile Gauge Certificates To JordanDocument4 pagesProfile Gauge Certificates To JordanMohammed Mosaad LyricsPas encore d'évaluation
- PH72Document112 pagesPH72Gisa IkawaPas encore d'évaluation
- Tn66-Tn67-Test-report To CWCT Tech Notes 66 67Document13 pagesTn66-Tn67-Test-report To CWCT Tech Notes 66 67GAPistPas encore d'évaluation
- PRO OX-100 - Aquasol Corporation - Brochure - PROOX.B1.0414.R3Document4 pagesPRO OX-100 - Aquasol Corporation - Brochure - PROOX.B1.0414.R3Abduol llyPas encore d'évaluation
- Permeation Source Construction GuideDocument5 pagesPermeation Source Construction GuidePravinPas encore d'évaluation
- 16906Document12 pages16906Ashish DubeyPas encore d'évaluation
- INS-004, Hydro-Testing Procedure For Bondstrand GRE and GRV Pipe-R1Document7 pagesINS-004, Hydro-Testing Procedure For Bondstrand GRE and GRV Pipe-R1jayhuacat7743100% (4)
- 2 - Inst Chem Lec Calibration of Instrumental Methods PTTDocument8 pages2 - Inst Chem Lec Calibration of Instrumental Methods PTTJoudPas encore d'évaluation
- Whitepaper Gamma Density CalibrationDocument16 pagesWhitepaper Gamma Density Calibrationrujisak_mPas encore d'évaluation
- Fuel Tank Hand Dip ProcedureDocument1 pageFuel Tank Hand Dip ProcedureBryan 'Phoneguru' Ndanyi100% (1)
- Uncertanity MeasurementDocument41 pagesUncertanity MeasurementShirosh AyeshmanthaPas encore d'évaluation