Vous aimerez peut-être aussi
- Chen 2017Document24 pagesChen 2017wn1529.20000Pas encore d'évaluation
- DGPSDocument20 pagesDGPStobinonline15730100% (1)
- Accuracy Investigation of PPP Method Versus Relative Positioning Using Different Satellite Ephemerides Products NearUnder Forest EnvironmentDocument10 pagesAccuracy Investigation of PPP Method Versus Relative Positioning Using Different Satellite Ephemerides Products NearUnder Forest EnvironmentSolPas encore d'évaluation
- Online DGPS Data ProcessingDocument7 pagesOnline DGPS Data ProcessingargaikwadPas encore d'évaluation
- Analysis of GNSS Accuracy of Relative Positioning and Precise Positioning Based On Online ServiceDocument14 pagesAnalysis of GNSS Accuracy of Relative Positioning and Precise Positioning Based On Online ServiceAnonymous OtTJKAritPas encore d'évaluation
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument19 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDev DasPas encore d'évaluation
- Application of GPS-RTK Technology in The Land ChanDocument6 pagesApplication of GPS-RTK Technology in The Land ChanVenkat IPas encore d'évaluation
- Real-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Document10 pagesReal-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Hammam AbdurrahmanPas encore d'évaluation
- UsingIGSProductsVer21 CorDocument34 pagesUsingIGSProductsVer21 CorariesugmPas encore d'évaluation
- # Opus Dogru2018Document7 pages# Opus Dogru2018Dev DasPas encore d'évaluation
- KiiyvertDocument20 pagesKiiyvertguillaume petitPas encore d'évaluation
- Evaluation of Performance of GPS Receiver in CRRIDocument8 pagesEvaluation of Performance of GPS Receiver in CRRIsaksham dixitPas encore d'évaluation
- ID Analisis Pengaruh Panjang Baseline TerhaDocument17 pagesID Analisis Pengaruh Panjang Baseline Terharomanz_657710156Pas encore d'évaluation
- Paper Presentation On Global Positioning SystemDocument45 pagesPaper Presentation On Global Positioning Systemakki11190Pas encore d'évaluation
- Fuzzy Clustering For Improved PositioningDocument12 pagesFuzzy Clustering For Improved PositioningijitePas encore d'évaluation
- GPS System ReportDocument17 pagesGPS System ReportKanik SharmaPas encore d'évaluation
- Evaluation of Performance of GPS Receiver in CRRIDocument8 pagesEvaluation of Performance of GPS Receiver in CRRIMuani HmarPas encore d'évaluation
- Full Report GnssDocument13 pagesFull Report GnssPunesh Subramaniam100% (1)
- SensorsDocument14 pagesSensorsOscar SilvaPas encore d'évaluation
- 50 DesigningDocument7 pages50 DesigningYoftahiPas encore d'évaluation
- PANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationDocument9 pagesPANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationkiopogmailcomPas encore d'évaluation
- Chapter 25Document25 pagesChapter 25muhammad sofyanPas encore d'évaluation
- Assessment of Network RTK Performance Using Corsnet-Nsw: Volker JanssenDocument18 pagesAssessment of Network RTK Performance Using Corsnet-Nsw: Volker Jansseninfor7Pas encore d'évaluation
- Real-Time Sounding Using RTK-GPSDocument15 pagesReal-Time Sounding Using RTK-GPSMarkoPas encore d'évaluation
- Surveying With GPSDocument6 pagesSurveying With GPSkevincoperPas encore d'évaluation
- CPM 5gps PDFDocument2 pagesCPM 5gps PDFGenPas encore d'évaluation
- 142 PDFDocument7 pages142 PDFbalajigm2340Pas encore d'évaluation
- Real Time Access To Multiple GPS Tracks: Karol Waga, Andrei Tabarcea, Radu Mariescu-Istodor and Pasi FräntiDocument7 pagesReal Time Access To Multiple GPS Tracks: Karol Waga, Andrei Tabarcea, Radu Mariescu-Istodor and Pasi FräntiAndrei TabarceaPas encore d'évaluation
- Sensors: Estimating Position From Millisecond Samples of Gps Signals (The "Fastfix" Algorithm)Document14 pagesSensors: Estimating Position From Millisecond Samples of Gps Signals (The "Fastfix" Algorithm)Ms RainPas encore d'évaluation
- GPS Project ReportDocument21 pagesGPS Project Reportrajansoni5675% (4)
- Analysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As ReceiverDocument16 pagesAnalysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As Receiverabdulmalik saniPas encore d'évaluation
- DGPS, Rtk-Gps and Starfire Dgps Performance Under Tree Shading EnvironmentsDocument7 pagesDGPS, Rtk-Gps and Starfire Dgps Performance Under Tree Shading EnvironmentsKray TharaPas encore d'évaluation
- Location Gps 0202Document21 pagesLocation Gps 0202Richard AmodaPas encore d'évaluation
- Comparing Long Baseline Results From GPS and GPS/GLONASSDocument10 pagesComparing Long Baseline Results From GPS and GPS/GLONASSDayallini WinxPas encore d'évaluation
- 2003-2004 IGS Annual ReportDocument255 pages2003-2004 IGS Annual ReportMichael Timothy TaslimanPas encore d'évaluation
- AMOS. Vallado. Benefits of Hosted Payload Architectures For Improved GEO SSA (Gap Times) (Revisit Rate) (Metrics)Document10 pagesAMOS. Vallado. Benefits of Hosted Payload Architectures For Improved GEO SSA (Gap Times) (Revisit Rate) (Metrics)darin koblickPas encore d'évaluation
- CPM 5gpsDocument2 pagesCPM 5gpsTayyab RahmanPas encore d'évaluation
- Pros and Cons of The Global Positioning SystemDocument55 pagesPros and Cons of The Global Positioning SystemAl_Ahnaf_Akbar_9295Pas encore d'évaluation
- Global Positioning System: Paper Presentation OnDocument10 pagesGlobal Positioning System: Paper Presentation OnSravan Kumar100% (1)
- GSM GPRS Based TrackerDocument29 pagesGSM GPRS Based TrackerAitzaz HussainPas encore d'évaluation
- opt/nress/nspires App/prod 10/temp/17538Document7 pagesopt/nress/nspires App/prod 10/temp/17538Zhibo ZhangPas encore d'évaluation
- Recent IERS Site Survey of Multiple Co-Located Geodetic Techniques by NGSDocument13 pagesRecent IERS Site Survey of Multiple Co-Located Geodetic Techniques by NGSAnand BabuPas encore d'évaluation
- Intervehicle-Communication-Assisted Localization: Nabil Mohamed Drawil, Member, IEEE, and Otman Basir, Member, IEEEDocument14 pagesIntervehicle-Communication-Assisted Localization: Nabil Mohamed Drawil, Member, IEEE, and Otman Basir, Member, IEEENeeraj KumarPas encore d'évaluation
- Flight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileDocument5 pagesFlight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS ProfileRR886Pas encore d'évaluation
- A Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsDocument10 pagesA Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsBhaskar Dutta KarmakarPas encore d'évaluation
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- Comparison of Satellite Orbit Ephemerides For Use in GPS MeteorologyDocument6 pagesComparison of Satellite Orbit Ephemerides For Use in GPS MeteorologySyach RoelPas encore d'évaluation
- Lobal Ositioning Ystem: Welcome To Physics Project OnDocument27 pagesLobal Ositioning Ystem: Welcome To Physics Project OnYuvraj SainiPas encore d'évaluation
- Map Matching For Intelligent Speed AdaptationDocument12 pagesMap Matching For Intelligent Speed Adaptationajainb239Pas encore d'évaluation
- An Improved RBF Network For Predicting Location in Mobile NetworkDocument4 pagesAn Improved RBF Network For Predicting Location in Mobile Networkبورنان محمدPas encore d'évaluation
- Control SurveyDocument25 pagesControl Surveyolajori hassan60% (5)
- 2006 - Location Errors ++Document16 pages2006 - Location Errors ++Uy Nguyen VanPas encore d'évaluation
- Reverse RTK Technical PaperDocument6 pagesReverse RTK Technical PaperIkram OthmanPas encore d'évaluation
- Received Signal Strength IndicatorDocument4 pagesReceived Signal Strength Indicatorjcdlopes390Pas encore d'évaluation
- Challenges and Solutions For GPS Receiver Test: AgendaDocument23 pagesChallenges and Solutions For GPS Receiver Test: AgendaHung PhamPas encore d'évaluation
- DGPS SurveyDocument25 pagesDGPS SurveyBHUSHAN KANOJ100% (1)
- Concept of Geo-Informatics: Chapter - 1Document25 pagesConcept of Geo-Informatics: Chapter - 1Bharath HRPas encore d'évaluation
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oPas encore d'évaluation
- Uncertainties in GPS Positioning: A Mathematical DiscourseD'EverandUncertainties in GPS Positioning: A Mathematical DiscourseÉvaluation : 3 sur 5 étoiles3/5 (2)
- Em - 1110 1 1005Document498 pagesEm - 1110 1 1005Sajid arPas encore d'évaluation
- Presentation About Industrial Training For Cadastral, Engineering and HydrographyDocument56 pagesPresentation About Industrial Training For Cadastral, Engineering and HydrographyWan WanPas encore d'évaluation
- Map ReadingDocument25 pagesMap Readingwarkisa filePas encore d'évaluation
- Gvbwpî Awf C: Bdwbu 1Document13 pagesGvbwpî Awf C: Bdwbu 1Scientia Online CarePas encore d'évaluation
- Sig Projet 2013Document16 pagesSig Projet 2013Adil RhiouiPas encore d'évaluation
- Calculating The Vegetation Indices From Landsat 8 Image Using ArcGis 10 PDFDocument29 pagesCalculating The Vegetation Indices From Landsat 8 Image Using ArcGis 10 PDFMANISHPas encore d'évaluation
- Pipeline Design BasisDocument26 pagesPipeline Design BasisMajid Dixon100% (1)
- 1 IntroDocument25 pages1 IntroLen LenPas encore d'évaluation
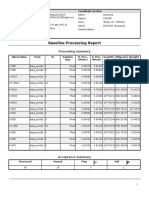
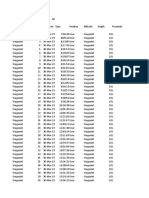
- Baseline Processing Report (Example)Document44 pagesBaseline Processing Report (Example)Andrei AndreiuTzPas encore d'évaluation
- Earth As Sphere (SPM MATHS)Document13 pagesEarth As Sphere (SPM MATHS)VisnuVaratanPas encore d'évaluation
- Boundary Opening Report For Plot 1797 Block 12 KibugaDocument3 pagesBoundary Opening Report For Plot 1797 Block 12 KibugaMwesigwa SamuelPas encore d'évaluation
- Using A Map Scale: 1inch 10 MilesDocument2 pagesUsing A Map Scale: 1inch 10 MilesKrishna MadhuPas encore d'évaluation
- Topographic Map of BurlesonDocument1 pageTopographic Map of BurlesonHistoricalMaps100% (1)
- Nad83 CA CoordinateDocument44 pagesNad83 CA Coordinateallen_renziPas encore d'évaluation
- Vehicle PositionsDocument621 pagesVehicle PositionsDivyam GuptaPas encore d'évaluation
- Keterangan: Iup Multi Harapan UtamaDocument1 pageKeterangan: Iup Multi Harapan Utamavorda buaymadangPas encore d'évaluation
- Land Surveying Resources Handbook Land Surveyors UnitedDocument24 pagesLand Surveying Resources Handbook Land Surveyors UnitedBradley Landman50% (2)
- Definition of Geodetic Surveying. PPTDocument17 pagesDefinition of Geodetic Surveying. PPTAhmad SalimPas encore d'évaluation
- MdeDocument65 pagesMdeAngel Alexis Mariño RomeroPas encore d'évaluation
- Copia de CURSOS SEPTIEMBRE 2020-BDocument48 pagesCopia de CURSOS SEPTIEMBRE 2020-BJuan Carlos PaucarPas encore d'évaluation
- 1 Introduction To Maps (1) - 054445Document26 pages1 Introduction To Maps (1) - 054445Entertainment and MoviesPas encore d'évaluation
- Carlson SurvPC BrochureDocument2 pagesCarlson SurvPC Brochurebbutros_317684077Pas encore d'évaluation
- Introduction To Cartographic Reference SystemsDocument17 pagesIntroduction To Cartographic Reference SystemsSingh PradeepPas encore d'évaluation
- HAPURODocument427 pagesHAPUROAdrian TorresPas encore d'évaluation
- Flooding Deagon Flood Flag MapDocument1 pageFlooding Deagon Flood Flag MapNgaire TaylorPas encore d'évaluation
- EPSGCODES-Authority Codes For Coordinate Reference SystemsDocument249 pagesEPSGCODES-Authority Codes For Coordinate Reference SystemsmizonexPas encore d'évaluation
- Baseline Summary ReportDocument53 pagesBaseline Summary ReportYura RachmaPas encore d'évaluation
- Gnomonic ChartDocument3 pagesGnomonic ChartAMAZING GREATNESSPas encore d'évaluation
- Flooding Camp Hill Flood Flag MapDocument1 pageFlooding Camp Hill Flood Flag MapNgaire TaylorPas encore d'évaluation
- Specialized Mapping in Bulgaria: Petar PenevDocument13 pagesSpecialized Mapping in Bulgaria: Petar PenevfeisalPas encore d'évaluation