Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- A Systematic Review of Unsupervised Learning Techniques For Software Defect PredictionDocument18 pagesA Systematic Review of Unsupervised Learning Techniques For Software Defect PredictionPRABHAKARANPas encore d'évaluation
- Opening Texts: Deconstruction and PoetryDocument8 pagesOpening Texts: Deconstruction and PoetryAléx IniestaPas encore d'évaluation
- Oral Com #1 ActivityDocument3 pagesOral Com #1 ActivityAngelica Sibayan QuinionesPas encore d'évaluation
- Kelas Masa Mata Pelajaran 3utm 7.30-8.30 BIDocument2 pagesKelas Masa Mata Pelajaran 3utm 7.30-8.30 BIRajen RajPas encore d'évaluation
- AI - ML Present ScenarioDocument28 pagesAI - ML Present ScenarioDr.Kishore Verma SPas encore d'évaluation
- BARICAUA MAYFLOR B. PBE Model EssayDocument1 pageBARICAUA MAYFLOR B. PBE Model EssayMayflor BaricauaPas encore d'évaluation
- AdolescenceDocument29 pagesAdolescenceivypearlbelicanPas encore d'évaluation
- 11 Abm Research g3Document18 pages11 Abm Research g3Ergil Villanueva RomualdoPas encore d'évaluation
- Evaluates Everyday Media and Information Presentations Regarding CodesDocument1 pageEvaluates Everyday Media and Information Presentations Regarding CodesvernaPas encore d'évaluation
- Lbs 302 Classroom Management PlanDocument10 pagesLbs 302 Classroom Management Planapi-437553094Pas encore d'évaluation
- Workshop 1 Template For Choosing AR TopicDocument1 pageWorkshop 1 Template For Choosing AR TopicRoxanne CarpenteroPas encore d'évaluation
- Paul Smith - Discerning The SubjectDocument226 pagesPaul Smith - Discerning The SubjectdisconnectaPas encore d'évaluation
- Denes-Raj, V., & Epstein, S. (1994) .Document12 pagesDenes-Raj, V., & Epstein, S. (1994) .David Alejandro Alvarez MaldonadoPas encore d'évaluation
- LTM 1Document10 pagesLTM 1Aas Yulia DasirPas encore d'évaluation
- Leadership and Management: A Company With Routine and Unskilled Job FunctionsDocument3 pagesLeadership and Management: A Company With Routine and Unskilled Job FunctionsDikshaa ChawlaPas encore d'évaluation
- Strategic Management by KalraDocument17 pagesStrategic Management by KalraHarshit KalraPas encore d'évaluation
- Food Chain ProjectDocument1 pageFood Chain Projectapi-398101586Pas encore d'évaluation
- Is Money AMotivator ArticleDocument4 pagesIs Money AMotivator ArticleRenaldyPas encore d'évaluation
- English9 Q3 Week1 v4Document11 pagesEnglish9 Q3 Week1 v4Jayvee DalaganPas encore d'évaluation
- 1944 - Robert - The Science of IdiomsDocument17 pages1944 - Robert - The Science of IdiomsErica WongPas encore d'évaluation
- Applications of Computational Intelligence Techniques in EngineeringDocument40 pagesApplications of Computational Intelligence Techniques in EngineeringShivani AgarwalPas encore d'évaluation
- Artificial Intelligence Assignment 5Document9 pagesArtificial Intelligence Assignment 5natasha ashleePas encore d'évaluation
- Motivation WorksheetDocument4 pagesMotivation WorksheetDragutescu Maria ElizaPas encore d'évaluation
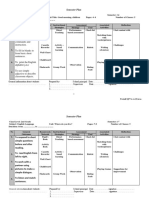
- Semester Plan: (Dictation)Document9 pagesSemester Plan: (Dictation)Future BookshopPas encore d'évaluation
- Lecture 1 - Subject Verb Agreement VDocument18 pagesLecture 1 - Subject Verb Agreement VHanan WaerPas encore d'évaluation
- Leadership AssignmentDocument2 pagesLeadership AssignmentSundus HamidPas encore d'évaluation
- I Think in Pictures - The Visual Spatial LearnerDocument11 pagesI Think in Pictures - The Visual Spatial Learnerapi-3846117100% (2)
- Bca 106 BusineesDocument6 pagesBca 106 BusineesanilperfectPas encore d'évaluation
- Unit 1 EDUC 5270 Written AssignmentDocument8 pagesUnit 1 EDUC 5270 Written AssignmentDonaid MusicPas encore d'évaluation
- Silent Letters NewDocument23 pagesSilent Letters NewHaji SahibPas encore d'évaluation