Vous aimerez peut-être aussi
- Design and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorDocument9 pagesDesign and Implementation of The Extended Kalman Filter For The Speed and Rotor Position Estimation of Brushless DC MotorSoujanya VinnakotaPas encore d'évaluation
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorD'EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorPas encore d'évaluation
- Faculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesDocument144 pagesFaculteit Der Elektrotechniek: Modelling and Identification of Single-And Double-Cage Induction MachinesAmatek Teekay 特克纳Pas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Identification of Variable Frequency Induction Motor Models From Operating DataDocument8 pagesIdentification of Variable Frequency Induction Motor Models From Operating Datani60Pas encore d'évaluation
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetD'EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetPas encore d'évaluation
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetD'EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÉvaluation : 2 sur 5 étoiles2/5 (1)
- PSMS Lab ManualDocument42 pagesPSMS Lab ManualIrfan Ali100% (1)
- Variable Speed AC Drives with Inverter Output FiltersD'EverandVariable Speed AC Drives with Inverter Output FiltersPas encore d'évaluation
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Parameter Estimation For Electric Motor Condition MonitoringDocument12 pagesParameter Estimation For Electric Motor Condition MonitoringNatarajPas encore d'évaluation
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaPas encore d'évaluation
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Permanent Magnet Synchronous Motor ControlDocument3 pagesPermanent Magnet Synchronous Motor ControlMarcin KowalskiPas encore d'évaluation
- Modelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityDocument23 pagesModelling of A Large Synchronous Generator and Computation of The Auto Reclosing Timing of The Circuit Breaker For Its Transient StabilityAnonymous zzMfpoBxPas encore d'évaluation
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourPas encore d'évaluation
- Simulation by Composite ModelDocument8 pagesSimulation by Composite Modelanshgarg786Pas encore d'évaluation
- Induction Motor Parameter Estimation Algorithm Using Spectral AnalysisDocument10 pagesInduction Motor Parameter Estimation Algorithm Using Spectral AnalysisRoberto SuPas encore d'évaluation
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Magnetising Flux Saturation in Variable-Speed Inverter-Fed Induction Motor DrivesDocument6 pagesMagnetising Flux Saturation in Variable-Speed Inverter-Fed Induction Motor DrivesSherif M. DabourPas encore d'évaluation
- Effect of Temperature Rise On The Performance of Induction MotorsDocument2 pagesEffect of Temperature Rise On The Performance of Induction Motorsud54Pas encore d'évaluation
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaPas encore d'évaluation
- Sensorless Vector Control of Induction Motors at Very Low SpeedDocument21 pagesSensorless Vector Control of Induction Motors at Very Low SpeedAli AldosPas encore d'évaluation
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalPas encore d'évaluation
- VF SynrmDocument10 pagesVF SynrmMusical CreationsPas encore d'évaluation
- Speed Regulation An Induction Motor Using Reference Adaptive ControlDocument5 pagesSpeed Regulation An Induction Motor Using Reference Adaptive ControlAtakan OzturKPas encore d'évaluation
- Direct Torque Control PHD ThesisDocument7 pagesDirect Torque Control PHD Thesisheathervargaspeoria100% (2)
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdPas encore d'évaluation
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariPas encore d'évaluation
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDocument8 pagesSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074Pas encore d'évaluation
- Estimacija Parametara Asinhronog MotoraDocument7 pagesEstimacija Parametara Asinhronog Motoramitrovic010Pas encore d'évaluation
- Nonlinear Modeling of DC/DC Converters Using The Hammerstein's ApproachDocument12 pagesNonlinear Modeling of DC/DC Converters Using The Hammerstein's ApproachDipanjan DasPas encore d'évaluation
- Induction Motor Design Using FEMMDocument13 pagesInduction Motor Design Using FEMMJunaid AhmadPas encore d'évaluation
- Fem PWM Inverter MaxwellDocument15 pagesFem PWM Inverter MaxwellBala KrishnanPas encore d'évaluation
- Dynamic Motor Parameter Identification For High Speed Flux Weakening Operation of Brushless Permanent Magnet Synchronous MachinesDocument7 pagesDynamic Motor Parameter Identification For High Speed Flux Weakening Operation of Brushless Permanent Magnet Synchronous Machineslilasaid2010Pas encore d'évaluation
- Stator Resistance and Speed Estimation For Induction Motor Drives As Influenced by SaturationDocument9 pagesStator Resistance and Speed Estimation For Induction Motor Drives As Influenced by Saturationalaaa3Pas encore d'évaluation
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Document6 pagesGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpPas encore d'évaluation
- 00908a - Using The DsPIC30F For Vector Control of An ACIMDocument76 pages00908a - Using The DsPIC30F For Vector Control of An ACIMJandfor Tansfg ErrottPas encore d'évaluation
- Speed Control of DC MotorDocument10 pagesSpeed Control of DC MotorYadira RocanoPas encore d'évaluation
- Modeling and Simulation of PermanentDocument83 pagesModeling and Simulation of PermanentSriram Anil Kumar GandhamPas encore d'évaluation
- A Novel Induction Machine ModelDocument16 pagesA Novel Induction Machine ModelManikanta BondadaPas encore d'évaluation
- Analysis and Simulation of The High-Speed Torque Performance of BrushleDocument10 pagesAnalysis and Simulation of The High-Speed Torque Performance of BrushlePhạm Văn TưởngPas encore d'évaluation
- EKF Applied To BLDCDocument9 pagesEKF Applied To BLDCUma SathyadevanPas encore d'évaluation
- MA-415 Industrial Drives Lab IndexDocument19 pagesMA-415 Industrial Drives Lab IndexMayankJainPas encore d'évaluation
- Simulation of Double-closed Loop Three-phase Asynchronous Variable Voltage Control SystemDocument7 pagesSimulation of Double-closed Loop Three-phase Asynchronous Variable Voltage Control Systemrmsharma1970Pas encore d'évaluation
- Electric machines simulation with QuickFieldDocument6 pagesElectric machines simulation with QuickFieldherytriwPas encore d'évaluation
- Condition Monitoring and Fault Diagnosis of Induction MotorDocument4 pagesCondition Monitoring and Fault Diagnosis of Induction MotorFelix RiestraPas encore d'évaluation
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviPas encore d'évaluation
- Robust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObserverDocument9 pagesRobust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObservernaserhashemniaPas encore d'évaluation
- Dynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesDocument5 pagesDynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesRaspy ReddyPas encore d'évaluation
- Extended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionSohibul HajahPas encore d'évaluation
- Dual 3-Phase PMSM Development Kit With MPC5643L: Application NoteDocument30 pagesDual 3-Phase PMSM Development Kit With MPC5643L: Application NoteM. T.Pas encore d'évaluation
- Fast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsDocument11 pagesFast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsMuhammad UmarPas encore d'évaluation
- Adaptive Speed Identification For Vector Control of Induction Motors Without Rotational TransducersDocument18 pagesAdaptive Speed Identification For Vector Control of Induction Motors Without Rotational Transducersrudi tabutiPas encore d'évaluation
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaPas encore d'évaluation
- Speed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKDocument8 pagesSpeed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKB.yaswanth KumarPas encore d'évaluation
- The Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsDocument27 pagesThe Squirrel-Cage Induction Motor Model and Its Parameter Identification Via Steady and Dynamic TestsAhmed 7mamPas encore d'évaluation
- Sensorless Conrtol - 2MDocument9 pagesSensorless Conrtol - 2MRaja ReddyPas encore d'évaluation
- Robust Control Study For Four-Wheel Active Steering VehicleDocument4 pagesRobust Control Study For Four-Wheel Active Steering VehicleBelkacem BerrehailPas encore d'évaluation
- PDFDocument5 pagesPDFBelkacem BerrehailPas encore d'évaluation
- Robust Control Study For Four-Wheel Active Steering VehicleDocument4 pagesRobust Control Study For Four-Wheel Active Steering VehicleBelkacem BerrehailPas encore d'évaluation
- PDFDocument6 pagesPDFBelkacem BerrehailPas encore d'évaluation
- 1 s2.0 S0019057809000883 MainDocument7 pages1 s2.0 S0019057809000883 MainBelkacem BerrehailPas encore d'évaluation
- Application of an extended Kalman filter to parameter identification of an induction motorDocument6 pagesApplication of an extended Kalman filter to parameter identification of an induction motorBelkacem BerrehailPas encore d'évaluation
- Slabs Are Plate Elements Forming Floors andDocument5 pagesSlabs Are Plate Elements Forming Floors andyasas89Pas encore d'évaluation
- 06b AppendixB2 (1000HPRig) 1582535891879Document103 pages06b AppendixB2 (1000HPRig) 1582535891879Harsh TiwariPas encore d'évaluation
- History and Evolution of Hybrid VehiclesDocument24 pagesHistory and Evolution of Hybrid VehiclesShrvan HirdePas encore d'évaluation
- Pyxis SPT HepDocument597 pagesPyxis SPT HepanithaarumallaPas encore d'évaluation
- Tomtom Device ForensicsDocument5 pagesTomtom Device ForensicsSwaroop WaghadePas encore d'évaluation
- Complete Checklist for Manual Upgrades to Oracle Database 12c R1Document27 pagesComplete Checklist for Manual Upgrades to Oracle Database 12c R1Augustine OderoPas encore d'évaluation
- Blasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyDocument3 pagesBlasting and Painting of Sheds, Pipes, Pipe Fittings, Vessels and Tanks DailyEjike Francis ChizobaPas encore d'évaluation
- Mini-Split Service GuideDocument49 pagesMini-Split Service Guideady_gligor7987Pas encore d'évaluation
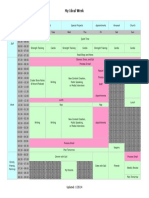
- My Ideal Week PDFDocument1 pageMy Ideal Week PDFAnonymous QE45TVC9e3Pas encore d'évaluation
- Installation Guide: For Packetfence Version 8.3.0Document270 pagesInstallation Guide: For Packetfence Version 8.3.0Ferjani TarekPas encore d'évaluation
- PDF 7758Document2 pagesPDF 7758José Antônio CardosoPas encore d'évaluation
- KQ2H M1 InchDocument5 pagesKQ2H M1 Inch林林爸爸Pas encore d'évaluation
- FinePrint pdfFactory Pro Trial Version PDF CreationDocument40 pagesFinePrint pdfFactory Pro Trial Version PDF CreationTUAN NGUYEN VANPas encore d'évaluation
- Engineeringexperv 00000 I 00146Document60 pagesEngineeringexperv 00000 I 00146LALEPas encore d'évaluation
- Eye Comfort Testing by TUeV Rheinland PDFDocument11 pagesEye Comfort Testing by TUeV Rheinland PDFevangelos!Pas encore d'évaluation
- Perkins T6.354 WorkshopDocument130 pagesPerkins T6.354 WorkshopAlexis SocarrósPas encore d'évaluation
- Strategic Human Resource Management and The HR ScorecardDocument20 pagesStrategic Human Resource Management and The HR ScorecardRajat JainPas encore d'évaluation
- DT Progression Pathways ks3 Textiles Y9Document1 pageDT Progression Pathways ks3 Textiles Y9api-240012980Pas encore d'évaluation
- MCQ - QuestionsTM P-1 PDFDocument8 pagesMCQ - QuestionsTM P-1 PDFRislan MohammedPas encore d'évaluation
- How To Use AZUpDocument1 pageHow To Use AZUpjovicasPas encore d'évaluation
- Grade 9 ICT Network Configuration GuideDocument15 pagesGrade 9 ICT Network Configuration GuideMark Anthony Nieva RafalloPas encore d'évaluation
- Reaction Paper The Flight From ConversationDocument4 pagesReaction Paper The Flight From ConversationJoe NasalitaPas encore d'évaluation
- Swift 2002 Annual ReportDocument53 pagesSwift 2002 Annual ReportFlaviub23Pas encore d'évaluation
- Awardees List - 11th VKA 2019 (Final)Document14 pagesAwardees List - 11th VKA 2019 (Final)ANKIT DWIVEDIPas encore d'évaluation
- Floor ManualDocument35 pagesFloor ManualGihan ChathurangaPas encore d'évaluation
- 29 KprogDocument582 pages29 KprogMike MorrowPas encore d'évaluation
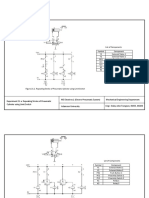
- List of ComponentsDocument2 pagesList of ComponentsRainwin TamayoPas encore d'évaluation
- Diffusion of InnovationDocument40 pagesDiffusion of Innovationlali62Pas encore d'évaluation
- Exercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Document4 pagesExercise 4 - HERBICIDE CALCULATION - MSMP Version - Docx Version 1Omaiwa Mo ShinderuPas encore d'évaluation
- Tapered Roller Bearings, RBC Tapered Thrust Bearings: Producing High-Quality Products Since 1929Document16 pagesTapered Roller Bearings, RBC Tapered Thrust Bearings: Producing High-Quality Products Since 1929eblees100Pas encore d'évaluation
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaD'EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaPas encore d'évaluation
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseD'EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseÉvaluation : 4.5 sur 5 étoiles4.5/5 (50)
- The Fabric of Civilization: How Textiles Made the WorldD'EverandThe Fabric of Civilization: How Textiles Made the WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (57)
- Sully: The Untold Story Behind the Miracle on the HudsonD'EverandSully: The Untold Story Behind the Miracle on the HudsonÉvaluation : 4 sur 5 étoiles4/5 (103)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationD'EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationÉvaluation : 4.5 sur 5 étoiles4.5/5 (46)
- A Place of My Own: The Architecture of DaydreamsD'EverandA Place of My Own: The Architecture of DaydreamsÉvaluation : 4 sur 5 étoiles4/5 (241)
- Pale Blue Dot: A Vision of the Human Future in SpaceD'EverandPale Blue Dot: A Vision of the Human Future in SpaceÉvaluation : 4.5 sur 5 étoiles4.5/5 (586)
- Highest Duty: My Search for What Really MattersD'EverandHighest Duty: My Search for What Really MattersPas encore d'évaluation
- The Weather Machine: A Journey Inside the ForecastD'EverandThe Weather Machine: A Journey Inside the ForecastÉvaluation : 3.5 sur 5 étoiles3.5/5 (31)
- Transformed: Moving to the Product Operating ModelD'EverandTransformed: Moving to the Product Operating ModelÉvaluation : 4 sur 5 étoiles4/5 (1)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestD'EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestÉvaluation : 4 sur 5 étoiles4/5 (28)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980D'Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Évaluation : 4 sur 5 étoiles4/5 (21)
- The Future of Geography: How the Competition in Space Will Change Our WorldD'EverandThe Future of Geography: How the Competition in Space Will Change Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- A Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsD'EverandA Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsPas encore d'évaluation
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesD'EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesPas encore d'évaluation
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseD'EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseÉvaluation : 3.5 sur 5 étoiles3.5/5 (12)
- The End of Craving: Recovering the Lost Wisdom of Eating WellD'EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellÉvaluation : 4.5 sur 5 étoiles4.5/5 (80)
- Packing for Mars: The Curious Science of Life in the VoidD'EverandPacking for Mars: The Curious Science of Life in the VoidÉvaluation : 4 sur 5 étoiles4/5 (1395)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureD'EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureÉvaluation : 5 sur 5 étoiles5/5 (124)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsD'EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsPas encore d'évaluation
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansD'EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansPas encore d'évaluation
- Reality+: Virtual Worlds and the Problems of PhilosophyD'EverandReality+: Virtual Worlds and the Problems of PhilosophyÉvaluation : 4 sur 5 étoiles4/5 (24)
- Artificial Intelligence: A Guide for Thinking HumansD'EverandArtificial Intelligence: A Guide for Thinking HumansÉvaluation : 4.5 sur 5 étoiles4.5/5 (30)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterD'EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterÉvaluation : 5 sur 5 étoiles5/5 (3)