Vous aimerez peut-être aussi
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Table of Content: Children's Voices - K1 14 Children's Voices - K2 .15Document16 pagesTable of Content: Children's Voices - K1 14 Children's Voices - K2 .15aloksahu1Pas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hydrodynamics For Ocean Engineers: Marine PropellersDocument20 pagesHydrodynamics For Ocean Engineers: Marine PropellersSp1K7Pas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- PHDDocument198 pagesPHDSushma SinghPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Matrix CalculusDocument33 pagesThe Matrix Calculusmaurizio.desio4992Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- GuidelinesDocument37 pagesGuidelinesCaleb HePas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Pandey - Effects of Air Space in ABF 2004 PDFDocument74 pagesPandey - Effects of Air Space in ABF 2004 PDFOcta AcePas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Related Topics/headings: Categorical Data Analysis Or, Nonparametric Statistics Or, Chi-SquareDocument17 pagesRelated Topics/headings: Categorical Data Analysis Or, Nonparametric Statistics Or, Chi-Squarebt2014Pas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- MG02C702 Programming VLT Micro Drive EngDocument74 pagesMG02C702 Programming VLT Micro Drive EngNikola PerencevicPas encore d'évaluation
- 3D PrintingDocument2 pages3D Printingaloksahu1Pas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- WEG Specification of Electric Motors 50039409 Manual EnglishDocument68 pagesWEG Specification of Electric Motors 50039409 Manual Englishfrenchaqp100% (1)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Ijcerv5n4spl 01Document6 pagesIjcerv5n4spl 01faisalwalksicloudPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Low Cost Submarine RobotDocument6 pagesLow Cost Submarine Robotaloksahu1Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Machines Lab - Fulton's Drag Calculations CEE102 - FallDocument8 pagesMachines Lab - Fulton's Drag Calculations CEE102 - Fallaloksahu1Pas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Slotine Lectures On Nonlinear SystemsDocument3 pagesSlotine Lectures On Nonlinear Systemsaloksahu1Pas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Mil STD 1553bDocument61 pagesMil STD 1553baloksahu1Pas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Ijcerv5n4spl 01Document6 pagesIjcerv5n4spl 01faisalwalksicloudPas encore d'évaluation
- 2019 MTECH AI SampleQuestions PDFDocument4 pages2019 MTECH AI SampleQuestions PDFArnab RayPas encore d'évaluation
- CbseDocument10 pagesCbsedarshanraghuPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Mil STD 1553bDocument61 pagesMil STD 1553baloksahu1Pas encore d'évaluation
- Path-Following Algorithms and Experiments For An Unmanned Surface VehicleDocument21 pagesPath-Following Algorithms and Experiments For An Unmanned Surface Vehiclealoksahu1Pas encore d'évaluation
- RFQ Auctions With Supplier Qualification ScreeningDocument17 pagesRFQ Auctions With Supplier Qualification Screeningaloksahu1Pas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Safety at WorkDocument180 pagesSafety at Workaloksahu1Pas encore d'évaluation
- A Hierarchical Real-Time Control Architecture For A Semi-Autonomous Underwater VehicleDocument11 pagesA Hierarchical Real-Time Control Architecture For A Semi-Autonomous Underwater Vehiclealoksahu1Pas encore d'évaluation
- Neural Network Augmented Identification of Underwater Vehicle ModelsDocument11 pagesNeural Network Augmented Identification of Underwater Vehicle ModelsRuchit PathakPas encore d'évaluation
- FNT CF Recsys SurveyDocument95 pagesFNT CF Recsys Surveyaloksahu1Pas encore d'évaluation
- Solving Optimal Control Problems With MATLABDocument21 pagesSolving Optimal Control Problems With MATLABxarthrPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Termodinamika Vol 1Document138 pagesTermodinamika Vol 1Moh Rusli BahtiarPas encore d'évaluation
- Introduction To Simulation Using R: 13.1 Analysis Versus Computer SimulationDocument19 pagesIntroduction To Simulation Using R: 13.1 Analysis Versus Computer Simulationmonti_1234Pas encore d'évaluation
- NBCF ApproachDocument8 pagesNBCF ApproachRano RenoPas encore d'évaluation
- Matrix FactorisationDocument26 pagesMatrix Factorisationaloksahu1Pas encore d'évaluation
- Time Series Data Analysis For Forecasting - A Literature ReviewDocument5 pagesTime Series Data Analysis For Forecasting - A Literature ReviewIJMERPas encore d'évaluation
- 3393 - Supervision of Concrete Construction Volume 2Document271 pages3393 - Supervision of Concrete Construction Volume 2Oum ChhayNoy100% (11)
- Oct2020 GCE Final PDFDocument30 pagesOct2020 GCE Final PDFGavinPas encore d'évaluation
- Zoom and Re-Zoom Team ActivityDocument2 pagesZoom and Re-Zoom Team ActivityWalshie28050% (1)
- Eng Essay For PresentationDocument8 pagesEng Essay For Presentationctn batrisyiaPas encore d'évaluation
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- Spectral Analysis of The ECG SignalDocument2 pagesSpectral Analysis of The ECG SignalCamilo BenitezPas encore d'évaluation
- Huawei FusionServer RH2288 V3 Data Sheet PDFDocument2 pagesHuawei FusionServer RH2288 V3 Data Sheet PDFMartenMattisenPas encore d'évaluation
- Fame and FortuneDocument8 pagesFame and FortuneNguyễn Đình Tuấn ĐạtPas encore d'évaluation
- FWD Week 47 Learning Material For Alaric YeoDocument7 pagesFWD Week 47 Learning Material For Alaric YeoarielPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Links of XII Physics Investigatory Project Allowtment 2Document3 pagesLinks of XII Physics Investigatory Project Allowtment 2yashtomarsoop07Pas encore d'évaluation
- Surface TensisonDocument28 pagesSurface TensisonJAWAD AHMAD BURTPas encore d'évaluation
- Erp Case StudyDocument19 pagesErp Case StudyMøÑïkå Shàrmå100% (1)
- Missouri Department of Transportation: Standard Inspection and Testing Plan (ITP)Document32 pagesMissouri Department of Transportation: Standard Inspection and Testing Plan (ITP)mohamedamine.zemouriPas encore d'évaluation
- Unit B: What Is Customer-Based Brand Equity?Document3 pagesUnit B: What Is Customer-Based Brand Equity?So-Nam Dorji Dr-UKpaPas encore d'évaluation
- Technical Data Sheet: BS-510 All Pressure Solvent CementDocument1 pageTechnical Data Sheet: BS-510 All Pressure Solvent CementBuwanah SelvaarajPas encore d'évaluation
- ISMR B-School BrochureDocument28 pagesISMR B-School Brochurerahul kantPas encore d'évaluation
- Metalastik Type Chevron SpringsDocument6 pagesMetalastik Type Chevron SpringsBo WangPas encore d'évaluation
- Term Paper On Strategic ManagementDocument8 pagesTerm Paper On Strategic Managementea7j5ys3100% (1)
- Vocabulary Levels Tests Versions 1 2Document12 pagesVocabulary Levels Tests Versions 1 2Rangsiya PjewPas encore d'évaluation
- International Journal of Agricultural ExtensionDocument6 pagesInternational Journal of Agricultural Extensionacasushi ginzagaPas encore d'évaluation
- METR3210 Clausius ClapeyronDocument28 pagesMETR3210 Clausius Clapeyronshubhang2392Pas encore d'évaluation
- A Comparison Study of Process Scheduling in Freebsd, Linux and Win2KDocument12 pagesA Comparison Study of Process Scheduling in Freebsd, Linux and Win2Kbenito agusPas encore d'évaluation
- Post Quiz Threads PDFDocument5 pagesPost Quiz Threads PDFshubham_narkhedePas encore d'évaluation
- Bc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreDocument60 pagesBc63kb8a Dy152 - 153 Vendor Drawing n001 Air Compressors SperreSimonaMauna33% (3)
- Chapter Vii. Damascius and Hyperignorance: Epublications@BondDocument10 pagesChapter Vii. Damascius and Hyperignorance: Epublications@BondRami TouqanPas encore d'évaluation
- Unit 9: Cities of The World I. ObjectivesDocument4 pagesUnit 9: Cities of The World I. ObjectivesTrang Hoang NguyenPas encore d'évaluation
- FOCGB5 Rtest 1-6BDocument3 pagesFOCGB5 Rtest 1-6BM-DPas encore d'évaluation
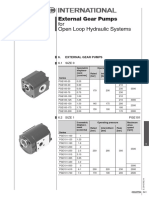
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievPas encore d'évaluation
- Language Focus. Past Simple or Past ContinuousDocument3 pagesLanguage Focus. Past Simple or Past ContinuoustotydnrPas encore d'évaluation
- Chip War: The Fight for the World's Most Critical TechnologyD'EverandChip War: The Fight for the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (228)
- CISSP All-in-One Exam Guide, Ninth EditionD'EverandCISSP All-in-One Exam Guide, Ninth EditionÉvaluation : 5 sur 5 étoiles5/5 (1)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsD'EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsÉvaluation : 5 sur 5 étoiles5/5 (3)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)D'EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Évaluation : 5 sur 5 étoiles5/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]D'EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Évaluation : 5 sur 5 étoiles5/5 (2)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002D'EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Évaluation : 5 sur 5 étoiles5/5 (1)