Vous aimerez peut-être aussi
- Introduccion Al Control Robusto Español PDFDocument34 pagesIntroduccion Al Control Robusto Español PDFFrancisco GomezPas encore d'évaluation
- Probabilidad y Estadistica - Ejercicio1Document6 pagesProbabilidad y Estadistica - Ejercicio1German Felipe TorresPas encore d'évaluation
- Formato de Entrega-Practica 1Document6 pagesFormato de Entrega-Practica 1FernandoLopezPas encore d'évaluation
- Propiedades Del Aire en Neumática e HidráulicaDocument15 pagesPropiedades Del Aire en Neumática e HidráulicaCarlos VillatoroPas encore d'évaluation
- Diseño de Sistema Electroneumático Básico para El Control Del Vaciado de Materiales A Granel en Una TolvaDocument6 pagesDiseño de Sistema Electroneumático Básico para El Control Del Vaciado de Materiales A Granel en Una TolvaJuanje TLPas encore d'évaluation
- Controlador Proporcional VVDocument4 pagesControlador Proporcional VVangela delgadoPas encore d'évaluation
- Proyecto de Control AnalogoDocument24 pagesProyecto de Control AnalogoMónik TelloPas encore d'évaluation
- Sesion 2 Señal 4 A 20 MaDocument27 pagesSesion 2 Señal 4 A 20 Maj_saldivias9866Pas encore d'évaluation
- Introducción A Los Controladores PIDDocument24 pagesIntroducción A Los Controladores PIDVictor ReyesPas encore d'évaluation
- Controladores Por RetroalimentacionDocument16 pagesControladores Por RetroalimentacionMoises MartinezPas encore d'évaluation
- Control TemperaturaDocument6 pagesControl Temperaturajrockb1234Pas encore d'évaluation
- Sistema de Fase MínimaDocument8 pagesSistema de Fase Mínimaelianny jimenezPas encore d'évaluation
- Practica ControlDocument4 pagesPractica ControlJesus Angel Aragon MoralesPas encore d'évaluation
- Controlador de Nivel de TanqueDocument7 pagesControlador de Nivel de TanqueCarlos RamosPas encore d'évaluation
- Control de Potencia de CD Por SCRDocument4 pagesControl de Potencia de CD Por SCRmaxPas encore d'évaluation
- PRACTICA I "PROPIEDADES ELECTRICAS" - Documentos de Google PDFDocument13 pagesPRACTICA I "PROPIEDADES ELECTRICAS" - Documentos de Google PDFChristopher GarzaPas encore d'évaluation
- Sistemas en Tiempo ContinuoDocument34 pagesSistemas en Tiempo ContinuoEl CanoeroPas encore d'évaluation
- Previo SCR N°8Document3 pagesPrevio SCR N°8AndrésEduardoMartinezPas encore d'évaluation
- Problemario Estabilidad Segúnda ParteDocument18 pagesProblemario Estabilidad Segúnda ParteCarlos Uriel Martinez TinocoPas encore d'évaluation
- Modelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaDocument5 pagesModelamiento Matemático de Un Tanque de Nivel - Funcion TransferenciaAlberto Bardalez AricaPas encore d'évaluation
- Criterios de Estabilidad JURYDocument13 pagesCriterios de Estabilidad JURYDavid NietoPas encore d'évaluation
- Control Nivel LabviewDocument12 pagesControl Nivel LabviewAngel CoatzaPas encore d'évaluation
- Analisis Del Circuito de Control de Llenado de Tanque Con OpampsDocument23 pagesAnalisis Del Circuito de Control de Llenado de Tanque Con OpampsMario Saico0% (1)
- AcondicionamientoTermocuplaJDocument15 pagesAcondicionamientoTermocuplaJJuan Diego Calsin Tapia67% (3)
- Labview BastianDocument84 pagesLabview BastianLuis Lema100% (1)
- Características eléctricas de diodos semiconductorDocument4 pagesCaracterísticas eléctricas de diodos semiconductorNevetse NehtPas encore d'évaluation
- Técnicas de Sintonización de ControladoresDocument6 pagesTécnicas de Sintonización de ControladoresJuankSalazarPas encore d'évaluation
- Practica 4 Moc3011..Document19 pagesPractica 4 Moc3011..JOSSSG0750% (2)
- Diagramas de BodeDocument12 pagesDiagramas de BodeAlex SuáMPas encore d'évaluation
- Arrays Leds 11x11 LABVIEWDocument11 pagesArrays Leds 11x11 LABVIEWchePas encore d'évaluation
- Informe Control PidDocument9 pagesInforme Control PidByron ArgosPas encore d'évaluation
- Bayas Jordy Deber1 8493Document5 pagesBayas Jordy Deber1 8493Jordy BayasPas encore d'évaluation
- Implementación de GRAFCETs con métodos asíncrono y síncronoDocument4 pagesImplementación de GRAFCETs con métodos asíncrono y síncronoJuan Luis MerloPas encore d'évaluation
- Informe Control de Temperatura para Un CautínDocument3 pagesInforme Control de Temperatura para Un CautínAlejandra OrdóñezPas encore d'évaluation
- Formula de MasonDocument5 pagesFormula de MasonLucas Omar Blandón PulidoPas encore d'évaluation
- Sistema mecatrónicoDocument5 pagesSistema mecatrónicoprestige23Pas encore d'évaluation
- Modelo Matemático de Un Motor DC en SerieDocument3 pagesModelo Matemático de Un Motor DC en SerieMayrita MopositaPas encore d'évaluation
- Reporte de Practica de SensoresDocument26 pagesReporte de Practica de SensoresJaime Gerhad Zúñiga BarreraPas encore d'évaluation
- Acciones de ControlDocument55 pagesAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Simulación analógica de un sistema linealDocument7 pagesSimulación analógica de un sistema linealIVAN ALONSO CCAHUACHIA LETONAPas encore d'évaluation
- Control ON-OFFDocument10 pagesControl ON-OFFRubén RiveraPas encore d'évaluation
- Tarea Met IntuitivoDocument3 pagesTarea Met IntuitivoMarlen BalderasPas encore d'évaluation
- Diagramas de Veitch - KarnaughtDocument8 pagesDiagramas de Veitch - KarnaughtRene Gonzales VasquezPas encore d'évaluation
- Actividad 4. Caracterización Estática de Un SensorDocument6 pagesActividad 4. Caracterización Estática de Un SensorLuis CastilloPas encore d'évaluation
- Control Digital DirectoDocument19 pagesControl Digital DirectoClaudio Ayala BravoPas encore d'évaluation
- Practicas ServofluidosDocument8 pagesPracticas Servofluidosquieroleer888Pas encore d'évaluation
- Regla de Mason 1Document19 pagesRegla de Mason 1Royer Yaguana100% (1)
- Estabilidad de Sistema de Control DigitalDocument7 pagesEstabilidad de Sistema de Control DigitalKolb JavierPas encore d'évaluation
- Secuencias Neumaticas FluidsimDocument3 pagesSecuencias Neumaticas FluidsimjohnpirPas encore d'évaluation
- Practica #9 HisteresisDocument9 pagesPractica #9 HisteresisyazminPas encore d'évaluation
- Reporte Proyecto Final Circuitos Hidraulicos y Neumaticos.Document23 pagesReporte Proyecto Final Circuitos Hidraulicos y Neumaticos.Edgar Campa0% (1)
- 1.1 Etapas de Un AutomatismoDocument12 pages1.1 Etapas de Un AutomatismoJulmarPas encore d'évaluation
- Proyecto Control de Velocidad de Un Motor de CD Con OperacionalesDocument21 pagesProyecto Control de Velocidad de Un Motor de CD Con Operacionalesramses zamora ortizPas encore d'évaluation
- Reporte Del Primer Circuito NeumáticoDocument8 pagesReporte Del Primer Circuito Neumáticoluis alberto robles favaPas encore d'évaluation
- Mando de un cilindro de doble efecto con retorno temporizadoDocument7 pagesMando de un cilindro de doble efecto con retorno temporizadoAngelicaGalindoPas encore d'évaluation
- Unidad 3 Circuitos HidraulicosDocument20 pagesUnidad 3 Circuitos HidraulicosgacbvmPas encore d'évaluation
- Sistema MIMO 2X2 ControlDocument14 pagesSistema MIMO 2X2 ControlSergio Oliveros MartinezPas encore d'évaluation
- Control MultivariableDocument15 pagesControl MultivariableClaudio Ayala BravoPas encore d'évaluation
- Informe 8 - Lab Control 2Document6 pagesInforme 8 - Lab Control 2JaimeRicardoVenegasZambranoPas encore d'évaluation
- Cap 01Document44 pagesCap 01Aristides BulaPas encore d'évaluation
- Introducción A MatlabDocument11 pagesIntroducción A MatlabSucheful LyPas encore d'évaluation
- Introducción A MatlabDocument11 pagesIntroducción A MatlabSucheful LyPas encore d'évaluation
- MATLABDocument13 pagesMATLABSucheful LyPas encore d'évaluation
- Filtros Digitales FIRDocument4 pagesFiltros Digitales FIRSucheful LyPas encore d'évaluation
- Introduccion MicrocontroladoresDocument44 pagesIntroduccion MicrocontroladoresSucheful LyPas encore d'évaluation
- Motores Paso A PasoDocument10 pagesMotores Paso A Pasortapia_9Pas encore d'évaluation
- Introducción A MatlabDocument11 pagesIntroducción A MatlabSucheful LyPas encore d'évaluation
- Diseño de Filtros PasivosDocument48 pagesDiseño de Filtros PasivosSucheful LyPas encore d'évaluation
- Procesamiento de SeñalesDocument6 pagesProcesamiento de SeñalesSucheful LyPas encore d'évaluation
- Matlab FiltrosDocument7 pagesMatlab FiltrosSucheful LyPas encore d'évaluation
- Introduccion MicrocontroladoresDocument44 pagesIntroduccion MicrocontroladoresSucheful LyPas encore d'évaluation
- Que Es Un Jabon?Document3 pagesQue Es Un Jabon?Sucheful LyPas encore d'évaluation
- Sistemas MultivariablesDocument25 pagesSistemas MultivariablesSucheful LyPas encore d'évaluation
- Matlab FiltrosDocument23 pagesMatlab FiltrosGissela RomeroPas encore d'évaluation
- Di FilDocument23 pagesDi FilArmandinho Colque VargasPas encore d'évaluation
- Inform EsDocument2 pagesInform EsSucheful LyPas encore d'évaluation
- MinipcDocument4 pagesMinipcSucheful LyPas encore d'évaluation
- Programa Sintetico Teoria IIDocument1 pagePrograma Sintetico Teoria IISucheful LyPas encore d'évaluation
- Filtros MatlabDocument18 pagesFiltros MatlabHoover PantojaPas encore d'évaluation
- Intro ProcsdigDocument69 pagesIntro ProcsdigUlises UsPas encore d'évaluation
- Control Lineal en Variable de EstadoDocument12 pagesControl Lineal en Variable de EstadoSucheful LyPas encore d'évaluation
- 2014 AGO - Control Vectorial en VariadoresDocument2 pages2014 AGO - Control Vectorial en Variadoresenrique zamoraPas encore d'évaluation
- (SP) (Ovni) - Bob Lazar - Tecnologia Alien PDFDocument13 pages(SP) (Ovni) - Bob Lazar - Tecnologia Alien PDFlmdsa199150% (4)
- Bib Te XDocument14 pagesBib Te XLegendario Salazar Uchiha IIPas encore d'évaluation
- Guia BibtexDocument78 pagesGuia BibtexCristhian GzPas encore d'évaluation
- FBI - Project Blue BookDocument13 pagesFBI - Project Blue BookMadalinMadalinBPas encore d'évaluation
- Zonas Regionales de La Música Del Folklore ArgentinoDocument2 pagesZonas Regionales de La Música Del Folklore ArgentinoSucheful LyPas encore d'évaluation
- Apocrifos El Evangelio de Maria PDFDocument3 pagesApocrifos El Evangelio de Maria PDFSergio Casado GutiérrezPas encore d'évaluation
- Arduino BluetoothDocument6 pagesArduino BluetoothSucheful LyPas encore d'évaluation
- Los Ambientes AeroterrestresDocument3 pagesLos Ambientes AeroterrestresSucheful Ly0% (2)
- Actividad Unidad I Digitacion BasicaDocument2 pagesActividad Unidad I Digitacion BasicaAshely PerezPas encore d'évaluation
- Inf CMH - LEER-T - 0090 PDFDocument228 pagesInf CMH - LEER-T - 0090 PDFZamara AdPas encore d'évaluation
- Muros de Contención: Tipos y Funciones PrincipalesDocument2 pagesMuros de Contención: Tipos y Funciones PrincipalesKerly Aquino GonzalezPas encore d'évaluation
- Colombia 2019 Tesisi Asociatividad Estrategia de DesarrolloDocument23 pagesColombia 2019 Tesisi Asociatividad Estrategia de DesarrolloramonrosalesPas encore d'évaluation
- 6668932procedimiento de Titulacion Ingenieria Comercial 2015Document6 pages6668932procedimiento de Titulacion Ingenieria Comercial 2015josephsedPas encore d'évaluation
- La Capacidad de Gobernar en Organizaciones Complejas. Jorge EtkinDocument15 pagesLa Capacidad de Gobernar en Organizaciones Complejas. Jorge EtkinAnselmo Zapata100% (1)
- Arandelas Nord LockDocument16 pagesArandelas Nord LockJuan Gabriel Galvis ZuluagaPas encore d'évaluation
- Examen UC3 Mario Alberto Parra MolinaDocument5 pagesExamen UC3 Mario Alberto Parra Molinamario alberto parra molinaPas encore d'évaluation
- Salud BucalDocument20 pagesSalud BucalJaquePas encore d'évaluation
- Proyecto - Red HFC en La PazDocument6 pagesProyecto - Red HFC en La PazRodrigo Muñoz GarcíaPas encore d'évaluation
- Explique Cuáles Son Los Objetivos de La Descripción y Análisis de PuestosDocument2 pagesExplique Cuáles Son Los Objetivos de La Descripción y Análisis de PuestosNaara RodriguezPas encore d'évaluation
- Informe II La Responsabilidad en El Proceso de CertificacionDocument17 pagesInforme II La Responsabilidad en El Proceso de Certificacionseguridad aeronauticaPas encore d'évaluation
- Formato No 17 Cálculo de La MaterialidadDocument11 pagesFormato No 17 Cálculo de La MaterialidadmaryamPas encore d'évaluation
- Programa de Observacion de Comportamiento SeguroDocument8 pagesPrograma de Observacion de Comportamiento SeguroYenis Hernandez CardozoPas encore d'évaluation
- Cronograma Semana 06 Al 11Document1 pageCronograma Semana 06 Al 11Yesica ReynaPas encore d'évaluation
- Relación capacidad columna vigaDocument4 pagesRelación capacidad columna vigaRodrigo Teran MermaPas encore d'évaluation
- Software de seguimiento y control de proyectos civilesDocument4 pagesSoftware de seguimiento y control de proyectos civilesSergio Paul Aguirre Pino100% (3)
- Accesorios de Sistemas de RefrigeraciónDocument4 pagesAccesorios de Sistemas de RefrigeraciónJames VargasPas encore d'évaluation
- Diapositivas Gestion de Ventas - Grupo 6..Document14 pagesDiapositivas Gestion de Ventas - Grupo 6..Yenry Reluz CastroPas encore d'évaluation
- Plataforma de Contratación Del Sector PúblicoDocument2 pagesPlataforma de Contratación Del Sector PúblicozizitroPas encore d'évaluation
- Marco TeóricoDocument29 pagesMarco TeóricoIris RD0% (1)
- Laboratorio de BiotecnologíaDocument23 pagesLaboratorio de BiotecnologíaMireya MiguelPas encore d'évaluation
- Mapa de CalidadDocument2 pagesMapa de CalidadEva SalcedoPas encore d'évaluation
- Modulo 3 MolibdenoDocument40 pagesModulo 3 MolibdenoGerman Van der OlguinPas encore d'évaluation
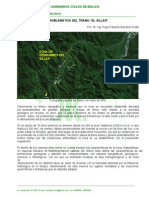
- Problemática Del Tramo "El Sillar"Document6 pagesProblemática Del Tramo "El Sillar"David Zamorano GongoraPas encore d'évaluation
- Analisis de Decisiones Minimizacion - PracticaDocument20 pagesAnalisis de Decisiones Minimizacion - PracticaJosé Chirinos FernándezPas encore d'évaluation
- Metodos de SintonizadoresDocument19 pagesMetodos de SintonizadoresAlan Darkness RapPas encore d'évaluation
- Los Medios de Comunicación y La Estafa Electrónica Nueva Forma de Delito ECUADORDocument15 pagesLos Medios de Comunicación y La Estafa Electrónica Nueva Forma de Delito ECUADORCECASEPas encore d'évaluation
- Trabajo Final, Habilidades DirectivasDocument7 pagesTrabajo Final, Habilidades DirectivasSophie HudsonPas encore d'évaluation
- Fundamentos de Electricidad, (Schaunm)Document458 pagesFundamentos de Electricidad, (Schaunm)DieGoOChoa75% (4)