Vous aimerez peut-être aussi
- Feynman Problems EMDocument49 pagesFeynman Problems EMErasmus Desiderius II100% (2)
- Standard-Slope Integration: A New Approach to Numerical IntegrationD'EverandStandard-Slope Integration: A New Approach to Numerical IntegrationPas encore d'évaluation
- Molecular Orbital TheoryDocument40 pagesMolecular Orbital TheoryDiptesh KanojiaPas encore d'évaluation
- Vectors Chapter - Pure Maths Guide From Love of MathsDocument35 pagesVectors Chapter - Pure Maths Guide From Love of MathsLove of Maths100% (2)
- Hydraulics ManualDocument42 pagesHydraulics ManualJm Cayapas100% (2)
- An Introduction To The Empirical Pseudopotential Method: Download A Mathematica ProgramDocument7 pagesAn Introduction To The Empirical Pseudopotential Method: Download A Mathematica ProgramosmansafaPas encore d'évaluation
- Problem Sets For Feynman Lectures On Physics Vol IIDocument49 pagesProblem Sets For Feynman Lectures On Physics Vol IIUlysses Contreras100% (3)
- General Relativity With Torsion (Extension of Chapter 3 Wald)Document18 pagesGeneral Relativity With Torsion (Extension of Chapter 3 Wald)Luis PérezPas encore d'évaluation
- Magnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheDocument6 pagesMagnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheMichelle MenciasPas encore d'évaluation
- Vectors, Spinors, and Complex Numbers in Classical and Quantum Physics David HestenesDocument23 pagesVectors, Spinors, and Complex Numbers in Classical and Quantum Physics David Hestenesosegeno654321100% (1)
- Discretization MethodsDocument32 pagesDiscretization MethodsHari SimhaPas encore d'évaluation
- Algebraic Geometry - GathmannDocument214 pagesAlgebraic Geometry - GathmannNiflheimPas encore d'évaluation
- Kaluza-Klein TheoryDocument23 pagesKaluza-Klein TheoryGilad Amar0% (1)
- Riemann - Metric Taylor ExpansionDocument30 pagesRiemann - Metric Taylor Expansionraphaelsantos08Pas encore d'évaluation
- Frenkel ClassDocument72 pagesFrenkel ClassFrank SitranaPas encore d'évaluation
- Geometry of The Dirac Theory: ABSTRACT. The Dirac Wave Function Is Represented in A Form WhereDocument26 pagesGeometry of The Dirac Theory: ABSTRACT. The Dirac Wave Function Is Represented in A Form WhereSilviuPas encore d'évaluation
- Ch5 Acc Maxwell and Waves V3Document11 pagesCh5 Acc Maxwell and Waves V3christian26brownPas encore d'évaluation
- Grain BoundariesDocument5 pagesGrain Boundariesdon donPas encore d'évaluation
- Physics 370 Final Exam Solution Hints Spring Semester 2012 (Study Guide Version)Document13 pagesPhysics 370 Final Exam Solution Hints Spring Semester 2012 (Study Guide Version)Χρίστος ΠαπαναστασίουPas encore d'évaluation
- Errata - A Most Incomprehensible ThingDocument16 pagesErrata - A Most Incomprehensible ThingAshish JogPas encore d'évaluation
- Curves 2018Document69 pagesCurves 2018Arindam BPas encore d'évaluation
- Jsd2006 Introduction To Clifford AlgebraDocument16 pagesJsd2006 Introduction To Clifford AlgebraNissplusPas encore d'évaluation
- From Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsDocument42 pagesFrom Apollonius To Zaremba: Local-Global Phenomena in Thin OrbitsLuis Alberto FuentesPas encore d'évaluation
- Vector Calc SummaryDocument7 pagesVector Calc SummaryJedwin VillanuevaPas encore d'évaluation
- Eometry and Oordinates: Polar CoordinatesDocument14 pagesEometry and Oordinates: Polar CoordinatestomPas encore d'évaluation
- Sisc Lab 16 17 Report PDFDocument17 pagesSisc Lab 16 17 Report PDFKishan G. RaoPas encore d'évaluation
- A Beginner's Guide To SupergravityDocument64 pagesA Beginner's Guide To SupergravitysabernightPas encore d'évaluation
- E K-Algebras Are Associative K-Algebras Are Obtained by Ignoring Permutations. UsDocument15 pagesE K-Algebras Are Associative K-Algebras Are Obtained by Ignoring Permutations. UsEpic WinPas encore d'évaluation
- Numerical Optimization Project Cme 304, Winter Quarter 2016: 1 The Problem StatementDocument30 pagesNumerical Optimization Project Cme 304, Winter Quarter 2016: 1 The Problem StatementHussa 27Pas encore d'évaluation
- Quantum Gravity at The Fifth Root of UnityDocument10 pagesQuantum Gravity at The Fifth Root of UnityQuantum Gravity ResearchPas encore d'évaluation
- Gauge Fields SupercomputersDocument55 pagesGauge Fields SupercomputersqftgaugePas encore d'évaluation
- Stress Strain TensorDocument44 pagesStress Strain Tensorעוז אושרי100% (1)
- Notes 12Document22 pagesNotes 12Aqib Ali KhanPas encore d'évaluation
- Tensorsc Algebras and Topologies With Application To PhysicsDocument46 pagesTensorsc Algebras and Topologies With Application To PhysicsLucas SilvaPas encore d'évaluation
- Relativity Demystified ErrataDocument9 pagesRelativity Demystified ErrataRamzan8850Pas encore d'évaluation
- The Carbuncle Phenomenon Is IncurableDocument10 pagesThe Carbuncle Phenomenon Is IncurableGerardo XZPas encore d'évaluation
- Tensors and The Equations of Fluid MotionDocument27 pagesTensors and The Equations of Fluid MotionSindhu JangamPas encore d'évaluation
- Claus Kiefer and Erik A Martfnez - On Time and The Quantum-To-Classical Transition in Jordan-Brans-Dicke Quantum GravityDocument9 pagesClaus Kiefer and Erik A Martfnez - On Time and The Quantum-To-Classical Transition in Jordan-Brans-Dicke Quantum GravityTuoma2Pas encore d'évaluation
- KSStelle Swieca LecturesDocument106 pagesKSStelle Swieca Lecturesk.stelle5205Pas encore d'évaluation
- Article Hourglass Energy.3.9.03Document10 pagesArticle Hourglass Energy.3.9.03Stamin StefanPas encore d'évaluation
- Matrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesDocument16 pagesMatrix Algebra For Beginners, Part II Linear Transformations, Eigenvectors and EigenvaluesPhine-hasPas encore d'évaluation
- How Stress Intensity Factors Are Calculated: BackgroundDocument8 pagesHow Stress Intensity Factors Are Calculated: BackgroundAimless DeeganPas encore d'évaluation
- Lec 20Document12 pagesLec 20stathiss11Pas encore d'évaluation
- Mat Lab Beam DeflectionDocument15 pagesMat Lab Beam Deflectionriyyo2424Pas encore d'évaluation
- CBR KalkulusDocument44 pagesCBR KalkulusKevin BatubaraPas encore d'évaluation
- CBR KALKULUS KelompokDocument40 pagesCBR KALKULUS KelompokJonipar MunthePas encore d'évaluation
- Zheng-Cheng Gu and Xiao-Gang Wen - A Lattice Bosonic Model As A Quantum Theory of GravityDocument4 pagesZheng-Cheng Gu and Xiao-Gang Wen - A Lattice Bosonic Model As A Quantum Theory of GravityKiomaxPas encore d'évaluation
- 10.1007@s00006 020 1045 1Document22 pages10.1007@s00006 020 1045 1Uli Urio-LegoPas encore d'évaluation
- LAnotesDocument51 pagesLAnotesslurm101Pas encore d'évaluation
- Noncommutative Vector Bundles: The Greatest Hits™ of The K - Theory of C - AlgebrasDocument31 pagesNoncommutative Vector Bundles: The Greatest Hits™ of The K - Theory of C - AlgebrasKeeley HoekPas encore d'évaluation
- Finite Element Notes Berkeley PDFDocument119 pagesFinite Element Notes Berkeley PDFDanilo ÁlvaroPas encore d'évaluation
- Fancier Version PhysicsDocument4 pagesFancier Version Physicsmuhammad azizPas encore d'évaluation
- Geometry and Quantum MechanicsDocument7 pagesGeometry and Quantum MechanicsahsbonPas encore d'évaluation
- Steven K. Winker - Quandles, Knot Invariants and The N-Fold Branched CoverDocument114 pagesSteven K. Winker - Quandles, Knot Invariants and The N-Fold Branched CoverOkommPas encore d'évaluation
- Advanced Quantum Mechanics II PHYS 40202Document3 pagesAdvanced Quantum Mechanics II PHYS 40202মোহাম্মদমহসিনPas encore d'évaluation
- Geometric Algebra For Electrical EngineersDocument286 pagesGeometric Algebra For Electrical EngineersbrcgomezlePas encore d'évaluation
- Matrix Inverse.Document3 pagesMatrix Inverse.ps3266_753186479Pas encore d'évaluation
- Heat DiffusionDocument8 pagesHeat DiffusionCocoaPas encore d'évaluation
- The Magnetotelluric Inverse ProblemDocument21 pagesThe Magnetotelluric Inverse ProblemXaviier PerezzPas encore d'évaluation
- Donaldson 1989 Connected Sums of Self-Dual Manifolds and Deformations of Singular SpacesDocument44 pagesDonaldson 1989 Connected Sums of Self-Dual Manifolds and Deformations of Singular SpacesGuido FranchettiPas encore d'évaluation
- 43 - The Klein-Gordon Equation PDFDocument7 pages43 - The Klein-Gordon Equation PDFUltrazordPas encore d'évaluation
- Master the Fundamentals of Electromagnetism and EM-InductionD'EverandMaster the Fundamentals of Electromagnetism and EM-InductionPas encore d'évaluation
- Blow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)D'EverandBlow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)Pas encore d'évaluation
- Models For Simulating Salt Movement in Aggregated Field SoilsDocument19 pagesModels For Simulating Salt Movement in Aggregated Field SoilsNilson Yecid BautistaPas encore d'évaluation
- A Synthesis of Tortuosity and Dispersion in Effective Thermal Conductivity of Porous Media. C. YangDocument9 pagesA Synthesis of Tortuosity and Dispersion in Effective Thermal Conductivity of Porous Media. C. YangNilson Yecid BautistaPas encore d'évaluation
- Unconventional and Fractured Reservoir ModelingDocument3 pagesUnconventional and Fractured Reservoir ModelingNilson Yecid BautistaPas encore d'évaluation
- Talk (Hehl & Obukhov)Document22 pagesTalk (Hehl & Obukhov)Nilson Yecid BautistaPas encore d'évaluation
- Sintering of Powdered Copper: Brendan Short, Brendan Barrett, Jason Gamble Engineering 45, SRJC Fall 2011Document25 pagesSintering of Powdered Copper: Brendan Short, Brendan Barrett, Jason Gamble Engineering 45, SRJC Fall 2011476500Pas encore d'évaluation
- Experiment 4 Rotational DynamicsDocument2 pagesExperiment 4 Rotational DynamicsDave FortuPas encore d'évaluation
- XYZ 200 ManualDocument95 pagesXYZ 200 ManualRaymond LO OtucopiPas encore d'évaluation
- Bundle 2 Review - KEYDocument4 pagesBundle 2 Review - KEYABHISHEK SinghPas encore d'évaluation
- Fluid Flow Operation - 130502Document2 pagesFluid Flow Operation - 130502sanjayPas encore d'évaluation
- Rail Wheel 1Document28 pagesRail Wheel 1rajanjasuPas encore d'évaluation
- Unit 8: Mechanical Principles: Deadlines: Assignment One: 24Document44 pagesUnit 8: Mechanical Principles: Deadlines: Assignment One: 24Jo okPas encore d'évaluation
- Air Pollution Control TechDocument52 pagesAir Pollution Control TechvivekPas encore d'évaluation
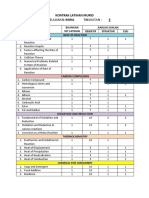
- Mata Pelajaran: Kimia Tingkatan:: Kontrak Latihan Murid 5Document2 pagesMata Pelajaran: Kimia Tingkatan:: Kontrak Latihan Murid 5hazilah1969100% (1)
- Test Papers 176476Document29 pagesTest Papers 176476Gaurav SarkarPas encore d'évaluation
- Final Research PaperDocument20 pagesFinal Research PaperPat Peralta DaizPas encore d'évaluation
- Spur Gears Component GeneratorDocument5 pagesSpur Gears Component Generatormisapera35Pas encore d'évaluation
- Rectangular Combined Footing Design Result PDFDocument3 pagesRectangular Combined Footing Design Result PDFMelekeenPas encore d'évaluation
- Gamma RayDocument12 pagesGamma RayKevinPas encore d'évaluation
- 2022 SAJC H2 Chem SolutionsDocument36 pages2022 SAJC H2 Chem SolutionsBooPas encore d'évaluation
- Numerical Tool For Antenna AnalysisDocument41 pagesNumerical Tool For Antenna AnalysisThilaga MohanPas encore d'évaluation
- Sample Paper 3Document5 pagesSample Paper 3AKSHAT VISHNOIPas encore d'évaluation
- Essentials of Hydraulics - DrSolomon Chapters 1 - 3Document135 pagesEssentials of Hydraulics - DrSolomon Chapters 1 - 3Jôssŷ FkrPas encore d'évaluation
- A Simple Theory of The Invar Effect in Iron-Nickel AlloysDocument16 pagesA Simple Theory of The Invar Effect in Iron-Nickel AlloysArley HenriquePas encore d'évaluation
- 9 4Document1 page9 4Prince QueenoPas encore d'évaluation
- Lista de Exercicios Sobre AlcanosDocument4 pagesLista de Exercicios Sobre AlcanosquelfisicaPas encore d'évaluation
- 12 Simple Notes (EM) - 3 MarksDocument12 pages12 Simple Notes (EM) - 3 MarksNidhiPas encore d'évaluation
- Assignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"Document2 pagesAssignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"nickky_agrawal52Pas encore d'évaluation
- Instrumentación SísmicaDocument40 pagesInstrumentación SísmicatelconrackPas encore d'évaluation
- Problem Sheet 1Document3 pagesProblem Sheet 1Debanjan DeyPas encore d'évaluation
- CHEG 320 - Electrode Kinetics - Extended NotesDocument13 pagesCHEG 320 - Electrode Kinetics - Extended NotesAzzkikrasdfPas encore d'évaluation