Vous aimerez peut-être aussi
- Same Virtus: Alarm ListDocument23 pagesSame Virtus: Alarm ListLacatusu Mircea100% (1)
- Principal Components Analysis and Redundancy AnalysisDocument18 pagesPrincipal Components Analysis and Redundancy AnalysisJosé António PereiraPas encore d'évaluation
- General Pathology Lecture Group 1 HandoutDocument6 pagesGeneral Pathology Lecture Group 1 HandoutCecille AnnPas encore d'évaluation
- Kim Shephard Chib 98Document33 pagesKim Shephard Chib 98ALVARO MIGUEL JESUS RODRIGUEZ SAENZPas encore d'évaluation
- Sequence Scheduling With Genetic Algorithms: GENITOR Algorithm We Obtain Best Known Solutions For 30 andDocument20 pagesSequence Scheduling With Genetic Algorithms: GENITOR Algorithm We Obtain Best Known Solutions For 30 andOlivia briannePas encore d'évaluation
- Nonlinear CosinorDocument13 pagesNonlinear CosinorAlbinas StankusPas encore d'évaluation
- Does Model-Free Forecasting Really Outperform The True Model?Document5 pagesDoes Model-Free Forecasting Really Outperform The True Model?Peer TerPas encore d'évaluation
- The Cooperative Royal Road: Avoiding HitchhikingDocument12 pagesThe Cooperative Royal Road: Avoiding HitchhikingMarius_2010Pas encore d'évaluation
- An Overview of Evolutionary ComputationDocument19 pagesAn Overview of Evolutionary ComputationwingorenatorPas encore d'évaluation
- Estimating Bayes Factors Via Posterior Simulation With The Laplace-Metropolis EstimatorDocument16 pagesEstimating Bayes Factors Via Posterior Simulation With The Laplace-Metropolis EstimatorDanielaGuardiaPas encore d'évaluation
- Genetic Algorithms and Heuristic Search: Terry Jones Stephanie ForrestDocument20 pagesGenetic Algorithms and Heuristic Search: Terry Jones Stephanie ForrestJayraj SinghPas encore d'évaluation
- IJAIADocument8 pagesIJAIAAdam HansenPas encore d'évaluation
- Matrix GARCH Model: Inference and Application: Cheng Yu, Dong Li, Feiyu Jiang, and Ke ZhuDocument32 pagesMatrix GARCH Model: Inference and Application: Cheng Yu, Dong Li, Feiyu Jiang, and Ke Zhuabundant.grace.cityPas encore d'évaluation
- Bestglm Using RDocument39 pagesBestglm Using RSankarsanaSahooPas encore d'évaluation
- Raking Survey Data 2 JOSDocument37 pagesRaking Survey Data 2 JOSNubyra ChowdhuryPas encore d'évaluation
- Literature Review On Arima ModelsDocument4 pagesLiterature Review On Arima Modelsafdtywgdu100% (1)
- Abstracts MonteCarloMethodsDocument4 pagesAbstracts MonteCarloMethodslib_01Pas encore d'évaluation
- Discrete Dynamics in Nature and Society, 2000, Vol. 4, No. 1, Pp. 29-37Document18 pagesDiscrete Dynamics in Nature and Society, 2000, Vol. 4, No. 1, Pp. 29-37openid_GabL1YCTPas encore d'évaluation
- Thesis of Slash DistributionDocument6 pagesThesis of Slash Distributionaliyahhkingnewark100% (1)
- Atomic Structure Generation From Reconstructing Structural FingerprintsDocument22 pagesAtomic Structure Generation From Reconstructing Structural Fingerprintshk esatonPas encore d'évaluation
- Roulette WheelDocument8 pagesRoulette WheelALFafaPas encore d'évaluation
- Genetic Algorithms and Very Fast Simulated Reannealing: A ComparisonDocument19 pagesGenetic Algorithms and Very Fast Simulated Reannealing: A ComparisonLester IngberPas encore d'évaluation
- Cointegracion MacKinnon, - Et - Al - 1996 PDFDocument26 pagesCointegracion MacKinnon, - Et - Al - 1996 PDFAndy HernandezPas encore d'évaluation
- Appendix Timeseries RegressionDocument10 pagesAppendix Timeseries RegressionEtis SunandiPas encore d'évaluation
- Research Reports Mdh/Ima No. 2007-4, Issn 1404-4978: Date Key Words and PhrasesDocument16 pagesResearch Reports Mdh/Ima No. 2007-4, Issn 1404-4978: Date Key Words and PhrasesEduardo Salgado EnríquezPas encore d'évaluation
- Towards Hybrid EaDocument17 pagesTowards Hybrid EakadaPas encore d'évaluation
- Fast Similarity Search in The Presence of Noise, Scaling, and Translation in Time-Series DatabasesDocument12 pagesFast Similarity Search in The Presence of Noise, Scaling, and Translation in Time-Series DatabasesmilancefakultetPas encore d'évaluation
- Chan Jeliazkov 2009Document20 pagesChan Jeliazkov 2009sommukhPas encore d'évaluation
- Real-Coded Adaptive Genetic Algorithm Applied To PID Parameter Optimization On A 6R ManipulatorsDocument5 pagesReal-Coded Adaptive Genetic Algorithm Applied To PID Parameter Optimization On A 6R ManipulatorsYoussef MajdoubPas encore d'évaluation
- What To Do (And NOT To Do) With Time-Series Cross-Section DataDocument14 pagesWhat To Do (And NOT To Do) With Time-Series Cross-Section DataVu Thi Duong BaPas encore d'évaluation
- On The Relationship Between Conditional (CAR) and Simultaneous (SAR) Autoregressive ModelsDocument20 pagesOn The Relationship Between Conditional (CAR) and Simultaneous (SAR) Autoregressive ModelsMauro ChaparroPas encore d'évaluation
- Multivariable Functional Interpolation and Adaptive NetworksDocument35 pagesMultivariable Functional Interpolation and Adaptive NetworksBruno FarinaPas encore d'évaluation
- A Quantum Swarm Evolutionary Algorithm For Mining Association Rules in Large DatabasesDocument6 pagesA Quantum Swarm Evolutionary Algorithm For Mining Association Rules in Large DatabasesAnonymous TxPyX8cPas encore d'évaluation
- 1 ARCH and Generalizations.: 1.1 Engle's ARCH ModelDocument4 pages1 ARCH and Generalizations.: 1.1 Engle's ARCH ModelWisse PrabawatiPas encore d'évaluation
- Fofana Lemelin Cockburn 2005Document15 pagesFofana Lemelin Cockburn 2005RodrigoOdónSalcedoCisnerosPas encore d'évaluation
- A Comparison of PLS and ML Bootstrapping Techniques in SEM: A Monte Carlo StudyDocument9 pagesA Comparison of PLS and ML Bootstrapping Techniques in SEM: A Monte Carlo StudyanindyaPas encore d'évaluation
- A Parallel Evolutionary Algorithm Applied To The Minimum Interference Frequency Assignment ProblemDocument12 pagesA Parallel Evolutionary Algorithm Applied To The Minimum Interference Frequency Assignment ProblemKhaled MeriPas encore d'évaluation
- (Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pDocument25 pages(Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pYouTube GuyPas encore d'évaluation
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroPas encore d'évaluation
- Travelling Salesman ProblemDocument31 pagesTravelling Salesman ProblemPriyanshu JainPas encore d'évaluation
- An Adaptive Particle Swarm Optimization Algorithm Based On Cat MapDocument8 pagesAn Adaptive Particle Swarm Optimization Algorithm Based On Cat MapmenguemenguePas encore d'évaluation
- Deriving Inferential Statistics From Recurrence Plots: A Recurrence-Based Test of Differences Between Sample Distributions and Its Comparison To The Two-Sample Kolmogorov-Smirnov TestDocument9 pagesDeriving Inferential Statistics From Recurrence Plots: A Recurrence-Based Test of Differences Between Sample Distributions and Its Comparison To The Two-Sample Kolmogorov-Smirnov TestSebastian WallotPas encore d'évaluation
- Econ610 m4 CRT FinalDocument6 pagesEcon610 m4 CRT FinalDickson phiriPas encore d'évaluation
- Inference in Particle Tracking Experiments by Passing Messages Between ImagesDocument6 pagesInference in Particle Tracking Experiments by Passing Messages Between ImagesLiquan PeiPas encore d'évaluation
- A Probabilistic Coding Based Quantum Genetic Algorithm For Multiple Sequence AlignmentDocument12 pagesA Probabilistic Coding Based Quantum Genetic Algorithm For Multiple Sequence Alignmentsheetal tanejaPas encore d'évaluation
- A Computationally Efficient Superresolution Image Reconstruction AlgorithmDocument11 pagesA Computationally Efficient Superresolution Image Reconstruction AlgorithmbinukirubaPas encore d'évaluation
- PHD Thesis NeuroscienceDocument42 pagesPHD Thesis NeuroscienceAnil Bheemaiah100% (1)
- Granger Newbold 1974Document14 pagesGranger Newbold 1974Allister HodgePas encore d'évaluation
- Nonlinear Extension of Asymmetric Garch Model Within Neural Network FrameworkDocument11 pagesNonlinear Extension of Asymmetric Garch Model Within Neural Network FrameworkCS & ITPas encore d'évaluation
- Projects 2015Document45 pagesProjects 2015Steven ArcadoPas encore d'évaluation
- A N: Vmiranda@porto - Inescn.pt: Muanda J. Da Fax: 351.2.318692Document7 pagesA N: Vmiranda@porto - Inescn.pt: Muanda J. Da Fax: 351.2.318692joonie5Pas encore d'évaluation
- Sec54 Online CompleteDocument18 pagesSec54 Online CompleteSanjna ChimnaniPas encore d'évaluation
- High Dimensional Change Point Estimation Via Sparse ProjectionDocument27 pagesHigh Dimensional Change Point Estimation Via Sparse ProjectionasifPas encore d'évaluation
- Vorlesung WeberDocument19 pagesVorlesung Weberdetki007Pas encore d'évaluation
- 01.13.hierarchical Model-Based Motion EstimationDocument16 pages01.13.hierarchical Model-Based Motion EstimationAlessioPas encore d'évaluation
- Assessment of Bias With Emphasis On Method Comparison: Roger JohnsonDocument6 pagesAssessment of Bias With Emphasis On Method Comparison: Roger JohnsonRafat ElshemiPas encore d'évaluation
- Chapter 6 Correlating Between Sets - 1999 - Aspects of Multivariate Statistical Analysis in GeologyDocument14 pagesChapter 6 Correlating Between Sets - 1999 - Aspects of Multivariate Statistical Analysis in GeologyAnderson CarvalhoPas encore d'évaluation
- Genus Statistics of The Virgo N-Body Simulations and The 1.2-Jy Redshift SurveyDocument20 pagesGenus Statistics of The Virgo N-Body Simulations and The 1.2-Jy Redshift Surveyneeraj12121Pas encore d'évaluation
- Sizer Analysis For The Comparison of Regression Curves: Cheolwoo Park and Kee-Hoon KangDocument27 pagesSizer Analysis For The Comparison of Regression Curves: Cheolwoo Park and Kee-Hoon KangjofrajodiPas encore d'évaluation
- Reviews in Computational Chemistry, Volume 31D'EverandReviews in Computational Chemistry, Volume 31Abby L. ParrillPas encore d'évaluation
- Readme PDFDocument1 pageReadme PDFAlexander Supertramp BytesPas encore d'évaluation
- Integrated Information TheoryDocument1 pageIntegrated Information TheoryAlexander Supertramp BytesPas encore d'évaluation
- Neuroscience A Quest For ConsciousnessDocument3 pagesNeuroscience A Quest For ConsciousnessAlexander Supertramp BytesPas encore d'évaluation
- Readme PDFDocument1 pageReadme PDFAlexander Supertramp BytesPas encore d'évaluation
- Mezoamerican GodDocument1 pageMezoamerican GodAlexander Supertramp BytesPas encore d'évaluation
- Info WorldDocument1 pageInfo WorldAlexander Supertramp BytesPas encore d'évaluation
- Predictions With Neural NetworksDocument4 pagesPredictions With Neural NetworksAlexander Supertramp BytesPas encore d'évaluation
- Hiro Faces SketchesDocument1 pageHiro Faces SketchesAlexander Supertramp BytesPas encore d'évaluation
- Brain GraphDocument1 pageBrain GraphAlexander Supertramp BytesPas encore d'évaluation
- Repository Architecture PDFDocument1 pageRepository Architecture PDFAlexander Supertramp BytesPas encore d'évaluation
- Phillip Dick PictureDocument1 pagePhillip Dick PictureAlexander Supertramp BytesPas encore d'évaluation
- Experiment oDocument1 pageExperiment oAlexander Supertramp BytesPas encore d'évaluation
- Repository Architecture PDFDocument1 pageRepository Architecture PDFAlexander Supertramp BytesPas encore d'évaluation
- Big Data ArchitectureDocument3 pagesBig Data ArchitectureAlexander Supertramp BytesPas encore d'évaluation
- Experiment oDocument1 pageExperiment oAlexander Supertramp BytesPas encore d'évaluation
- Big Data ArchitectureDocument3 pagesBig Data ArchitectureAlexander Supertramp BytesPas encore d'évaluation
- Module 1 Grade 8 (De Guzman)Document9 pagesModule 1 Grade 8 (De Guzman)Kim De GuzmanPas encore d'évaluation
- Practical Report Guideline EEE250Document8 pagesPractical Report Guideline EEE250MOHD ASYRAAF BIN SAIDINPas encore d'évaluation
- Ny-Damecaax500 Brochure Juli-2019Document8 pagesNy-Damecaax500 Brochure Juli-2019Shavin FernandoPas encore d'évaluation
- Pile FoundationDocument38 pagesPile FoundationChowdhury PriodeepPas encore d'évaluation
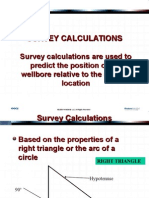
- 02 Survey Calculations - PpsDocument96 pages02 Survey Calculations - PpsLeo Ivan Aviles RicaldiPas encore d'évaluation
- Creating Attachments To Work Items or To User Decisions in WorkflowsDocument20 pagesCreating Attachments To Work Items or To User Decisions in Workflowselampe100% (1)
- NATCO Presentation - Desalters PDFDocument12 pagesNATCO Presentation - Desalters PDFshahmkamalPas encore d'évaluation
- PPF CalculatorDocument2 pagesPPF CalculatorshashanamouliPas encore d'évaluation
- TMT Boron CoatingDocument6 pagesTMT Boron Coatingcvolkan1100% (2)
- Budget of Work Sci5Document1 pageBudget of Work Sci5Jhoy Angeles PinlacPas encore d'évaluation
- Pioneer Car Stereo System DVH-735AVDocument85 pagesPioneer Car Stereo System DVH-735AVJs LópezPas encore d'évaluation
- API2000 Tank Venting CalcsDocument5 pagesAPI2000 Tank Venting Calcsruhul01Pas encore d'évaluation
- Fiber SyllabusDocument1 pageFiber SyllabusPaurav NayakPas encore d'évaluation
- Spare Parts List: Hydraulic BreakerDocument28 pagesSpare Parts List: Hydraulic BreakerTeknik MakinaPas encore d'évaluation
- Fractal Cities - A Geometry of Form and Function PDFDocument432 pagesFractal Cities - A Geometry of Form and Function PDFDavid Diaz100% (1)
- Cep MPDocument1 pageCep MPAzmat HabeebPas encore d'évaluation
- Nuclear Fusion EnergyDocument3 pagesNuclear Fusion EnergyAner Labaka UgartePas encore d'évaluation
- RespiratorypptDocument69 pagesRespiratorypptMichelle RotairoPas encore d'évaluation
- Ss e (Bocr) ManualDocument2 pagesSs e (Bocr) ManualNaveen GuptaPas encore d'évaluation
- Polya Problem Solving StrategiesDocument12 pagesPolya Problem Solving StrategiesGwandaleana VwearsosaPas encore d'évaluation
- Relay Maintenance and Testing: BenefitsDocument2 pagesRelay Maintenance and Testing: BenefitsojoladapoPas encore d'évaluation
- PS1Document2 pagesPS1Nitesh Kumar DubeyPas encore d'évaluation
- Unit 07 Self-Test Chemistry Self TestDocument2 pagesUnit 07 Self-Test Chemistry Self TestOluwatusin Ayo OluwatobiPas encore d'évaluation
- Factors That Affect College Students' Attitudes Toward MathematicsDocument17 pagesFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoPas encore d'évaluation
- DA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFDocument329 pagesDA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFrindy_bilhaniPas encore d'évaluation
- The Roles of ComputerDocument1 pageThe Roles of ComputerDika Triandimas0% (1)
- Vertical Ow Constructed Wetland Planted With Heliconia Psittacorum Used As Decentralized Post-Treatment of Anaerobic Ef Uent in Southern BrazilDocument10 pagesVertical Ow Constructed Wetland Planted With Heliconia Psittacorum Used As Decentralized Post-Treatment of Anaerobic Ef Uent in Southern BrazilAlfonso Ruiz PérezPas encore d'évaluation