Vous aimerez peut-être aussi
- A Projector-Camera System With Real-Time Photometric Adaptation For Dynamic EnvironmentsDocument8 pagesA Projector-Camera System With Real-Time Photometric Adaptation For Dynamic EnvironmentsXitocranPas encore d'évaluation
- Color Correction of Images Projected On A Colored Screen For Mobile Beam ProjectorDocument11 pagesColor Correction of Images Projected On A Colored Screen For Mobile Beam ProjectorXitocranPas encore d'évaluation
- Real-Time Adaptive Radiometric CompensationDocument11 pagesReal-Time Adaptive Radiometric CompensationXitocranPas encore d'évaluation
- Making One Object Look Like Another Controlling Appearance Using A Projector-Camera SystemDocument8 pagesMaking One Object Look Like Another Controlling Appearance Using A Projector-Camera SystemXitocranPas encore d'évaluation
- Multiresolution Gray-Scale and Rotation Invariant Texture Classification With Local Binary PatternsDocument17 pagesMultiresolution Gray-Scale and Rotation Invariant Texture Classification With Local Binary PatternsXitocranPas encore d'évaluation
- 2010 - Salamin - IEEE - Quantifyingeffects of Exposure To The Third and First-Person Perspectives Invirtual-Reality-Based TrainingDocument5 pages2010 - Salamin - IEEE - Quantifyingeffects of Exposure To The Third and First-Person Perspectives Invirtual-Reality-Based TrainingXitocranPas encore d'évaluation
- Beyond SlidingWindows: Object Localization by Efficient Subwindow SearchDocument8 pagesBeyond SlidingWindows: Object Localization by Efficient Subwindow SearchXitocranPas encore d'évaluation
- Fast Multi-Scale Template Matching Using Binary FeaturesDocument6 pagesFast Multi-Scale Template Matching Using Binary FeaturesXitocranPas encore d'évaluation
- Brain-Computer Interface For Virtual Reality ControlDocument6 pagesBrain-Computer Interface For Virtual Reality ControlXitocranPas encore d'évaluation
- The Giving TreeDocument27 pagesThe Giving Treedeny90% (49)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- TorqueDocument2 pagesTorquestaedtlerpPas encore d'évaluation
- Readme File of Ynogkm: Yun-Nan Observatory Geodesics in A Kerr-Newmann Spacetime For Massive ParticlesDocument3 pagesReadme File of Ynogkm: Yun-Nan Observatory Geodesics in A Kerr-Newmann Spacetime For Massive Particleschewbacca1409Pas encore d'évaluation
- Ring Foundation As Per IS 110891984Document4 pagesRing Foundation As Per IS 110891984Rajesh GangwalPas encore d'évaluation
- Conveyor Belting Engineering ManualDocument474 pagesConveyor Belting Engineering ManualDavid Londoño OchoaPas encore d'évaluation
- Pro Ducorit UkDocument2 pagesPro Ducorit Uksreeraj1986Pas encore d'évaluation
- Kritam - Portal and Cantilever Method2Document8 pagesKritam - Portal and Cantilever Method2KritamMaharjanPas encore d'évaluation
- Lab Report (Exp 1)Document11 pagesLab Report (Exp 1)NorfaizahPas encore d'évaluation
- Pressure Transmitter Data SheetDocument2 pagesPressure Transmitter Data Sheetneurolepsia3790Pas encore d'évaluation
- TU Wien - Einführung in Die Biomechanik VU (Thurner, 317.043 Introduction To Biomechanics) - Official Book ExerciseSolutions ForEthierDocument189 pagesTU Wien - Einführung in Die Biomechanik VU (Thurner, 317.043 Introduction To Biomechanics) - Official Book ExerciseSolutions ForEthierDanielle QuayePas encore d'évaluation
- Lihardo Rotua Sinaga. Maulidatul Fadhilah. Maria Angel Aftritesia. BilPhys19. Thermodynamics. Mini ResearchDocument14 pagesLihardo Rotua Sinaga. Maulidatul Fadhilah. Maria Angel Aftritesia. BilPhys19. Thermodynamics. Mini ResearchFitri handayaniPas encore d'évaluation
- Math 322 Notes 2 Introduction To FunctionsDocument7 pagesMath 322 Notes 2 Introduction To Functions09polkmnpolkmnPas encore d'évaluation
- University of Perpetual Help System DALTA Calamba CampusDocument23 pagesUniversity of Perpetual Help System DALTA Calamba CampusJ HPas encore d'évaluation
- ACS Style: Table Joseph Henry Press: Washington, DC, 2003 PP 145-158Document2 pagesACS Style: Table Joseph Henry Press: Washington, DC, 2003 PP 145-158aklima_sharminPas encore d'évaluation
- Piping Material Engineer's Handbook: BoltingDocument5 pagesPiping Material Engineer's Handbook: BoltingJitendra SurvePas encore d'évaluation
- 1 - YOKOGAWA FCN CPU Module Basic NFCP0100-S05 PDFDocument13 pages1 - YOKOGAWA FCN CPU Module Basic NFCP0100-S05 PDFHenry Alfaro BermudezPas encore d'évaluation
- Knight1982 2Document3 pagesKnight1982 2bahmanPas encore d'évaluation
- Jason MrazDocument13 pagesJason Mrazjhonatan_her10Pas encore d'évaluation
- Engineering Services LTD: CalculationDocument29 pagesEngineering Services LTD: CalculationtomPas encore d'évaluation
- 421 Lab Report 3Document4 pages421 Lab Report 3Christian SawayaPas encore d'évaluation
- Sinamics G130 / G150: Power BlockDocument12 pagesSinamics G130 / G150: Power BlockANDRES CISTERNASPas encore d'évaluation
- 34832-Original-Devender - ME - Paper ModifiedDocument8 pages34832-Original-Devender - ME - Paper ModifiedRomi SuhendarPas encore d'évaluation
- MUFON UFO Journal - February 1996Document24 pagesMUFON UFO Journal - February 1996Carlos RodriguezPas encore d'évaluation
- Oil Guns and Gas Firing Equipment PDFDocument24 pagesOil Guns and Gas Firing Equipment PDFPravin KumarPas encore d'évaluation
- Allison Transmision Om3753en, 3000-4000 SP Series Operators ManualDocument111 pagesAllison Transmision Om3753en, 3000-4000 SP Series Operators ManualHernan Reyes Carbonell100% (1)
- IEEE Xplore Download 135Document9 pagesIEEE Xplore Download 135Madalina MejdreaPas encore d'évaluation
- Mahasudarshan ChurnaDocument6 pagesMahasudarshan Churnadrsa2100% (1)
- AISC RequirementsDocument1 pageAISC Requirementsparag7676Pas encore d'évaluation
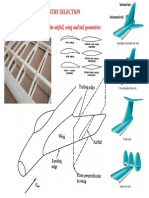
- Aircraft Design: Airfoil and Geometry SelectionDocument94 pagesAircraft Design: Airfoil and Geometry SelectionYak100% (10)
- Solutions JehleDocument39 pagesSolutions JehleLailaPas encore d'évaluation
- ACI Method of Proportioning Concrete MixesDocument6 pagesACI Method of Proportioning Concrete MixesEulogio JameroPas encore d'évaluation