Vous aimerez peut-être aussi
- Bring Quality Near Perfection With Six Sigma: Inspiring Business ConfidenceDocument4 pagesBring Quality Near Perfection With Six Sigma: Inspiring Business ConfidenceSharat ChandraPas encore d'évaluation
- Technical Notes.: Determination of Thermal Transport Properties in Ammonium PerchlorateDocument3 pagesTechnical Notes.: Determination of Thermal Transport Properties in Ammonium PerchlorateSharat ChandraPas encore d'évaluation
- Bring Quality Near Perfection With Six Sigma: Inspiring Business ConfidenceDocument4 pagesBring Quality Near Perfection With Six Sigma: Inspiring Business ConfidenceSharat ChandraPas encore d'évaluation
- Ultrasonic Measurements of Solid Propellant Burning Rates in Nozzleless Rocket MotorsDocument8 pagesUltrasonic Measurements of Solid Propellant Burning Rates in Nozzleless Rocket MotorsSharat ChandraPas encore d'évaluation
- Developments in and Implementation of Gas Generators For Fire SuppressionDocument16 pagesDevelopments in and Implementation of Gas Generators For Fire SuppressionSharat ChandraPas encore d'évaluation
- Simulation of A Cold Gas Thruster System and Test Data CorrelationDocument20 pagesSimulation of A Cold Gas Thruster System and Test Data CorrelationSharat ChandraPas encore d'évaluation
- Phillip: Stochl, Joseph E. Maloy, Masters, A D Richard LDocument63 pagesPhillip: Stochl, Joseph E. Maloy, Masters, A D Richard LSharat ChandraPas encore d'évaluation
- Regulator Basics - To B EprintedDocument14 pagesRegulator Basics - To B EprintedSharat ChandraPas encore d'évaluation
- AWS R I C P: Adiographic Nterpreter Ertification RogramDocument4 pagesAWS R I C P: Adiographic Nterpreter Ertification RogramSharat Chandra100% (1)
- Richard Nakka's Experimental Rocketry Web Site: Solid Rocket Motor Theory - GUIPEPDocument8 pagesRichard Nakka's Experimental Rocketry Web Site: Solid Rocket Motor Theory - GUIPEPSharat ChandraPas encore d'évaluation
- Home Tech Support Gauge CalibrationDocument1 pageHome Tech Support Gauge CalibrationSharat ChandraPas encore d'évaluation
- NL Master Specification Guide For Public Funded Buildings: Re-Issued 2009/10/01Document4 pagesNL Master Specification Guide For Public Funded Buildings: Re-Issued 2009/10/01Sharat ChandraPas encore d'évaluation
- Study of Hydrodynamics of Horizontal Spiral Coil Tube: Research PaperDocument3 pagesStudy of Hydrodynamics of Horizontal Spiral Coil Tube: Research PaperSharat ChandraPas encore d'évaluation
- Review On Comparative Study Between Helical Coil and Straight Tube Heat ExchangerDocument5 pagesReview On Comparative Study Between Helical Coil and Straight Tube Heat ExchangerSharat ChandraPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Iguard® LM SeriesDocument82 pagesIguard® LM SeriesImran ShahidPas encore d'évaluation
- Crypto Wall Crypto Snipershot OB Strategy - Day Trade SwingDocument29 pagesCrypto Wall Crypto Snipershot OB Strategy - Day Trade SwingArete JinseiPas encore d'évaluation
- IR2153 Parte6Document1 pageIR2153 Parte6FRANK NIELE DE OLIVEIRAPas encore d'évaluation
- PD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsDocument20 pagesPD3 - Strategic Supply Chain Management: Exam Exemplar QuestionsHazel Jael HernandezPas encore d'évaluation
- 2Document8 pages2Eduardo Antonio Comaru Gouveia75% (4)
- Mcdaniel Tanilla Civilian Resume Complete v1Document3 pagesMcdaniel Tanilla Civilian Resume Complete v1api-246751844Pas encore d'évaluation
- Analysis of Rates (Nh-15 Barmer - Sanchor)Document118 pagesAnalysis of Rates (Nh-15 Barmer - Sanchor)rahulchauhan7869Pas encore d'évaluation
- Conducting Focus GroupsDocument4 pagesConducting Focus GroupsOxfam100% (1)
- 18 Composition Rules For Photos That ShineDocument20 pages18 Composition Rules For Photos That Shinemahfuzkhan100% (1)
- Boundary Value Analysis 2Document13 pagesBoundary Value Analysis 2Raheela NasimPas encore d'évaluation
- I M Com QT Final On16march2016Document166 pagesI M Com QT Final On16march2016Khandaker Sakib Farhad0% (1)
- Introduction CompilerDocument47 pagesIntroduction CompilerHarshit SinghPas encore d'évaluation
- 3D Printing & Embedded ElectronicsDocument7 pages3D Printing & Embedded ElectronicsSantiago PatitucciPas encore d'évaluation
- Mueller Hinton Agar (M-H Agar) : CompositionDocument2 pagesMueller Hinton Agar (M-H Agar) : CompositionRizkaaulyaaPas encore d'évaluation
- Grade 7 Nap MayDocument6 pagesGrade 7 Nap Mayesivaks2000Pas encore d'évaluation
- SubaruDocument7 pagesSubaruclaude terizlaPas encore d'évaluation
- Nizkor Project Fallacies - LabossierDocument77 pagesNizkor Project Fallacies - Labossierapi-3766098100% (1)
- Module 5 What Is Matter PDFDocument28 pagesModule 5 What Is Matter PDFFLORA MAY VILLANUEVAPas encore d'évaluation
- John DrydenDocument3 pagesJohn DrydenDunas SvetlanaPas encore d'évaluation
- Jonathan Livingston Seagull - Richard Bach - (SAW000) PDFDocument39 pagesJonathan Livingston Seagull - Richard Bach - (SAW000) PDFAdrià SonetPas encore d'évaluation
- Lacey Robertson Resume 3-6-20Document1 pageLacey Robertson Resume 3-6-20api-410771996Pas encore d'évaluation
- Grade 3 - Unit 1 Increase and Decrease PatternDocument7 pagesGrade 3 - Unit 1 Increase and Decrease PatternKyo ToeyPas encore d'évaluation
- Toh736 - 84000 The Dharani of Parnasavari PDFDocument24 pagesToh736 - 84000 The Dharani of Parnasavari PDFJames LeePas encore d'évaluation
- Caterpillar Cat C7 Marine Engine Parts Catalogue ManualDocument21 pagesCaterpillar Cat C7 Marine Engine Parts Catalogue ManualkfsmmePas encore d'évaluation
- ReadingDocument205 pagesReadingHiền ThuPas encore d'évaluation
- Sample Learning Module As PatternDocument23 pagesSample Learning Module As PatternWilliam BulliganPas encore d'évaluation
- Img 20201010 0005Document1 pageImg 20201010 0005Tarek SalehPas encore d'évaluation
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationDocument6 pagesHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiPas encore d'évaluation
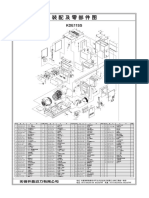
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1Pas encore d'évaluation
- HUMSS - Introduction To World Religions & Belief Systems CGDocument13 pagesHUMSS - Introduction To World Religions & Belief Systems CGAliuqus SirJasper89% (18)