Vous aimerez peut-être aussi
- ATI Space Satellite Radar Defense Technical Training Courses CatalogDocument64 pagesATI Space Satellite Radar Defense Technical Training Courses CatalogATI coursesPas encore d'évaluation
- Field Marshal Sam Manekshaw On LeadershipDocument9 pagesField Marshal Sam Manekshaw On LeadershipPushpendra Dwivedi100% (1)
- L7-Active Filters PDFDocument42 pagesL7-Active Filters PDFdes1982100% (1)
- DSP Lab ManualDocument57 pagesDSP Lab ManualRabia SamadPas encore d'évaluation
- Filter Design TechniquesDocument124 pagesFilter Design TechniquesNarasimha Sunchu100% (2)
- Ele242 Course Material Chapter 3Document21 pagesEle242 Course Material Chapter 3lkjhPas encore d'évaluation
- Solution Manual for an Introduction to Equilibrium ThermodynamicsD'EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsPas encore d'évaluation
- An Introduction To Digital Signal Processing: Edmund M-K. LaiDocument224 pagesAn Introduction To Digital Signal Processing: Edmund M-K. LaiSalam ArifPas encore d'évaluation
- Emerson Commander SK Trip and Status Diagnostic CodesDocument6 pagesEmerson Commander SK Trip and Status Diagnostic Codescastkarthick75% (12)
- Programming With WxDec-C++Document155 pagesProgramming With WxDec-C++Pushpendra DwivediPas encore d'évaluation
- Multirate Signal Processing: I. Selesnick EL 713 Lecture NotesDocument32 pagesMultirate Signal Processing: I. Selesnick EL 713 Lecture Notesboopathi123Pas encore d'évaluation
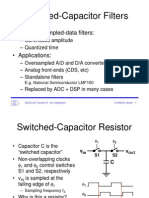
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediPas encore d'évaluation
- SC Filter Frequency ResponseDocument15 pagesSC Filter Frequency ResponsePushpendra DwivediPas encore d'évaluation
- MergeDocument459 pagesMergefirststudentPas encore d'évaluation
- Higher Order Filter Options: - Cascade of BiquadsDocument14 pagesHigher Order Filter Options: - Cascade of BiquadsPushpendra DwivediPas encore d'évaluation
- Implementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthDocument3 pagesImplementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthPushpendra DwivediPas encore d'évaluation
- Passive Filters: Dr. Holbert April 21, 2008Document12 pagesPassive Filters: Dr. Holbert April 21, 2008Walid HamdanePas encore d'évaluation
- Band Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKDocument11 pagesBand Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKopachecoPas encore d'évaluation
- All Pass Filter DesignDocument2 pagesAll Pass Filter Designnivia25Pas encore d'évaluation
- IIR FiltersDocument36 pagesIIR FiltersHari Pillai100% (1)
- Design Examples Using The ToolboxDocument23 pagesDesign Examples Using The Toolboxrajeevjain09Pas encore d'évaluation
- FilterDocument20 pagesFilterAsheque IqbalPas encore d'évaluation
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarPas encore d'évaluation
- ECD4 Freq ResponseDocument63 pagesECD4 Freq Responsedearprasanta6015Pas encore d'évaluation
- HFIC Chapter 7 Low-Noise Amplifier DesignDocument50 pagesHFIC Chapter 7 Low-Noise Amplifier DesignbsgkumarPas encore d'évaluation
- EC1371 Advanced Analog Circuits L1Document12 pagesEC1371 Advanced Analog Circuits L1RabbitSaviorPas encore d'évaluation
- Lecture 10Document22 pagesLecture 10mkrasanPas encore d'évaluation
- Lab2 Active FiltersDocument6 pagesLab2 Active FiltersAli MoharramPas encore d'évaluation
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoPas encore d'évaluation
- Review Problems - Passive Filters - SolutionDocument7 pagesReview Problems - Passive Filters - SolutionMaya Abdul HusseinPas encore d'évaluation
- FiltersDocument49 pagesFiltersZubeda MemonPas encore d'évaluation
- MODULE 2 ppt2 - Freq Response of BJT Amplifier Circuit With Coupling Cap Load Cap Bypass CapacitorDocument19 pagesMODULE 2 ppt2 - Freq Response of BJT Amplifier Circuit With Coupling Cap Load Cap Bypass CapacitorGokulnath S0% (1)
- Introduction to Frequency Selective CircuitsDocument36 pagesIntroduction to Frequency Selective CircuitsPhan Phuong NgocPas encore d'évaluation
- Experiment No.4Document4 pagesExperiment No.4Ranjith PPas encore d'évaluation
- Recall Linear Modulation: S (T) G (T) P (T) XDocument4 pagesRecall Linear Modulation: S (T) G (T) P (T) XBiswajit SinghPas encore d'évaluation
- Freq ResponseDocument48 pagesFreq ResponseOzephSharifPas encore d'évaluation
- Tuned Amplifiers : ch:12, SedraDocument18 pagesTuned Amplifiers : ch:12, SedraMuthu SaravananPas encore d'évaluation
- Case Study UttuDocument6 pagesCase Study UttuSarthak GautamPas encore d'évaluation
- Chapter 7Document46 pagesChapter 7nctgayarangaPas encore d'évaluation
- PLLTutorial ISSCC2004Document131 pagesPLLTutorial ISSCC2004Siddharth MathurPas encore d'évaluation
- Case Study AayuDocument6 pagesCase Study AayuSarthak GautamPas encore d'évaluation
- Pre-Emphasis and De-Emphasis CircuitsDocument13 pagesPre-Emphasis and De-Emphasis CircuitsNirmalkumarPas encore d'évaluation
- BJT - JFET Frequency ResponseDocument39 pagesBJT - JFET Frequency ResponseGem Raymund CastroPas encore d'évaluation
- Butterworth FilterDocument6 pagesButterworth FilterSauravAbidRahmanPas encore d'évaluation
- Common Emitter Amplifier With Current Series Feedback.: R H 2K, R R 10K. Since The Gain Is Very High, RC Is SelectedDocument3 pagesCommon Emitter Amplifier With Current Series Feedback.: R H 2K, R R 10K. Since The Gain Is Very High, RC Is SelectedPardhasaradhi DamarlaPas encore d'évaluation
- Unusual Filter CktsDocument46 pagesUnusual Filter Cktsraineymj100% (1)
- Chapter 4Document39 pagesChapter 4Shoaib MughalPas encore d'évaluation
- SYSC 4405 - Quiz5b SolutionDocument4 pagesSYSC 4405 - Quiz5b SolutionAleksandra DiottePas encore d'évaluation
- Active Filter-1 PDFDocument7 pagesActive Filter-1 PDFammerPas encore d'évaluation
- Microwave Filters: Prof. D. Kannadassan, School of Electronics EngineeringDocument23 pagesMicrowave Filters: Prof. D. Kannadassan, School of Electronics EngineeringAkshay GuptaPas encore d'évaluation
- EMCCDs and Digital CDS TechniquesDocument54 pagesEMCCDs and Digital CDS TechniquescobainusPas encore d'évaluation
- WINSEM2020-21 ECE2006 ETH VL2020210503110 CAT-2 QP KEY DSP CAT-2 Answers FinalDocument6 pagesWINSEM2020-21 ECE2006 ETH VL2020210503110 CAT-2 QP KEY DSP CAT-2 Answers FinalLuckyDon 1999Pas encore d'évaluation
- 08 - Delta Sigma PDFDocument20 pages08 - Delta Sigma PDFAmy BarryPas encore d'évaluation
- Lecture21 Multistage AmplifiersDocument10 pagesLecture21 Multistage AmplifierscitraumariPas encore d'évaluation
- ECA 2, Lab 11,12 (Terminal), Osama Sattar, FA19-BEE-172Document28 pagesECA 2, Lab 11,12 (Terminal), Osama Sattar, FA19-BEE-172Muneeb AhmadPas encore d'évaluation
- Frequency ResponseDocument30 pagesFrequency ResponseHarman Singh SomalPas encore d'évaluation
- 2-The Selectivity ProblemDocument47 pages2-The Selectivity ProblemMuhammad UsmanPas encore d'évaluation
- Ch9 - IIR Digital Filter DesignDocument78 pagesCh9 - IIR Digital Filter Designkamal100% (2)
- Antenna Basics PDFDocument24 pagesAntenna Basics PDFBoules AtefPas encore d'évaluation
- CH 8-Electrooptic Devices PDFDocument34 pagesCH 8-Electrooptic Devices PDFMahavir ChavdaPas encore d'évaluation
- SSB Generation and TransmittersDocument14 pagesSSB Generation and TransmittersLingga TanuwidjajaPas encore d'évaluation
- ECEN620: Network Theory Broadband Circuit Design Fall 2012: Lecture 15: Voltage-Controlled OscillatorsDocument24 pagesECEN620: Network Theory Broadband Circuit Design Fall 2012: Lecture 15: Voltage-Controlled OscillatorsMarius FerdyPas encore d'évaluation
- PracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFDocument70 pagesPracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFmyluvahanPas encore d'évaluation
- 5 BDocument1 page5 BPushpendra DwivediPas encore d'évaluation
- New Microsoft Office Word DocumentDocument15 pagesNew Microsoft Office Word DocumentPushpendra DwivediPas encore d'évaluation
- Using-Dev-CDocument11 pagesUsing-Dev-CigoysinghPas encore d'évaluation
- 5 BDocument1 page5 BPushpendra DwivediPas encore d'évaluation
- Nit Recruitment 2013 PDFDocument15 pagesNit Recruitment 2013 PDFSourabh AroraPas encore d'évaluation
- 25 BDocument1 page25 BPushpendra DwivediPas encore d'évaluation
- CompilersDocument191 pagesCompilersNitzan Ofer100% (1)
- PricelistDocument5 pagesPricelistDeepak Kumar AryaPas encore d'évaluation
- ESE Instructions 2011Document22 pagesESE Instructions 2011Pushpendra DwivediPas encore d'évaluation
- Practice For Elementary Algebra TestDocument9 pagesPractice For Elementary Algebra TestPushpendra DwivediPas encore d'évaluation
- Design of Stable IIR Digital Filters With Specified Group Delay ErrorsDocument6 pagesDesign of Stable IIR Digital Filters With Specified Group Delay ErrorsPushpendra DwivediPas encore d'évaluation
- N M) Is Given By: Nu) ) ), 'RALPDocument4 pagesN M) Is Given By: Nu) ) ), 'RALPPushpendra DwivediPas encore d'évaluation
- 3 ADocument1 page3 APushpendra DwivediPas encore d'évaluation
- 4 BDocument1 page4 BPushpendra DwivediPas encore d'évaluation
- Electronic Noise: - Dynamic Range in The Analog DomainDocument22 pagesElectronic Noise: - Dynamic Range in The Analog DomainPushpendra DwivediPas encore d'évaluation
- 1 BDocument1 page1 BPushpendra DwivediPas encore d'évaluation
- Sampling and Aliasing: - Any Continuous Time Signal Can Be Sampled and Processed in The Sampled-Data DomainDocument8 pagesSampling and Aliasing: - Any Continuous Time Signal Can Be Sampled and Processed in The Sampled-Data DomainPushpendra DwivediPas encore d'évaluation
- Administrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserDocument7 pagesAdministrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserPushpendra DwivediPas encore d'évaluation
- Analog Filter SynthesisDocument19 pagesAnalog Filter SynthesisPushpendra DwivediPas encore d'évaluation
- Tow Thomas PDFDocument16 pagesTow Thomas PDFsweety_1Pas encore d'évaluation
- Administrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserDocument7 pagesAdministrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserPushpendra DwivediPas encore d'évaluation
- Electronics Instrumentation 170715 PDFDocument22 pagesElectronics Instrumentation 170715 PDFra malPas encore d'évaluation
- Digital Control System ModellingDocument28 pagesDigital Control System ModellingSonam AlviPas encore d'évaluation
- Yamaha RX v596 HTR 5250 RX v596rdsDocument76 pagesYamaha RX v596 HTR 5250 RX v596rdsTC Kadir TaşkınPas encore d'évaluation
- Model Question Paper: SP 206 Wavelet Transforms: Theory and ApplicationsDocument2 pagesModel Question Paper: SP 206 Wavelet Transforms: Theory and Applicationssafu_117100% (1)
- Brain Tumour Extraction From MRI Images Using MATLABDocument4 pagesBrain Tumour Extraction From MRI Images Using MATLABKoshy Geoji0% (1)
- Uniform Color QuantizationDocument5 pagesUniform Color Quantizationpi194043Pas encore d'évaluation
- Multiresolution ExpansionsDocument8 pagesMultiresolution ExpansionsthinkableofficialhandlePas encore d'évaluation
- Department of Electrical Engineering Course Descriptive FileDocument8 pagesDepartment of Electrical Engineering Course Descriptive FiletarhantasPas encore d'évaluation
- GTU Bachelor of Engineering Signals and Systems CourseDocument3 pagesGTU Bachelor of Engineering Signals and Systems CourseadamPas encore d'évaluation
- Anna University Digital Signal Processing Question BankDocument6 pagesAnna University Digital Signal Processing Question Banks.ranjithPas encore d'évaluation
- Discrete Fourier Transform (DFT) : DFT Transforms The Time Domain Signal Samples To The Frequency Domain ComponentsDocument59 pagesDiscrete Fourier Transform (DFT) : DFT Transforms The Time Domain Signal Samples To The Frequency Domain ComponentsRandy SofyanPas encore d'évaluation
- Bbi Model QPDocument2 pagesBbi Model QPvanithapremkumarPas encore d'évaluation
- Icom Ic-F7000 Service ManualDocument79 pagesIcom Ic-F7000 Service ManualRobert/YG2AKR0% (1)
- Nexia CS DSP Conference System: FeaturesDocument2 pagesNexia CS DSP Conference System: FeaturesJuan M. BeristainPas encore d'évaluation
- A Distributed Canny Edge Detector Algorithm and FPGA ImplementationDocument17 pagesA Distributed Canny Edge Detector Algorithm and FPGA ImplementationverilogcourseteamPas encore d'évaluation
- Image Processing Color ModelsDocument56 pagesImage Processing Color ModelsAtharv SavarkarPas encore d'évaluation
- DSP Interview QuestionsDocument13 pagesDSP Interview QuestionsAnonymous jxm0WNS7QaPas encore d'évaluation
- Catalogo Xfire 2019Document12 pagesCatalogo Xfire 2019Daniel RuizPas encore d'évaluation
- M.E.VLSI DesignDocument43 pagesM.E.VLSI DesignThahsin ThahirPas encore d'évaluation
- (2002) Control of A Heavy-Duty Robotic Excavator Using Time Delay Control With Integral Sliding SurfaceDocument15 pages(2002) Control of A Heavy-Duty Robotic Excavator Using Time Delay Control With Integral Sliding Surfacehima012100% (1)
- M.SC PhysicsDocument19 pagesM.SC PhysicsWaaiz MohammedPas encore d'évaluation
- Top MCQs on Clipping OperationsDocument7 pagesTop MCQs on Clipping OperationsETHIO FIRST MUSICPas encore d'évaluation
- Computational Foundations of Cognitive Science: Lecture 15: Convolutions and KernelsDocument21 pagesComputational Foundations of Cognitive Science: Lecture 15: Convolutions and KernelsAnabela SilvaPas encore d'évaluation
- Signal and SystemsDocument2 pagesSignal and SystemsSaroj TimsinaPas encore d'évaluation
- ACC1 s2Document13 pagesACC1 s2كن صديقيPas encore d'évaluation