Académique Documents
Professionnel Documents
Culture Documents
13 Mem
Transféré par
Juan Sebastian Lalinde CTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
13 Mem
Transféré par
Juan Sebastian Lalinde CDroits d'auteur :
Formats disponibles
Aplicacin de agentes cognitivos en vehculos autnomos inteligentes.
Ernesto E. Lpez C. Ingeniera de Telecomunicaciones Universidad Carlos III de Madrid 100047345@alumnos.uc3m.es
1. Resumen:
Los vehculos no tripulados o robots inteligentes, permiten el desarrollo autnomo o semiautnomo de diferentes tipos de misiones que cubren desde los sectores de defensa y seguridad a los de agricultura, medio ambiente o transporte civil. El inters en su desarrollo, tanto a nivel de centros de investigacin como de sectores de usuarios potenciales, ha aumentado de manera considerable en los ltimos aos. Este documento da una breve visin general de la tecnologa implicada (agentes inteligentes) y de sus posibles aplicaciones. pero la variedad e importancia de las aplicaciones potenciales, y el incremento en las inversiones y avances en los ltimos aos, hace razonable prever un notable y rpido progreso en el futuro inmediato. En el presente documento nos referiremos al concepto de agentes inteligentes cognitivos como subrama de la inteligencia artificial y describiremos los diferentes avances en el desarrollo de vehculos marinos, terrestres y areos.
4. Robotica y psicologa
El inters cientfico en la rebotica mvil ha estado creciendo rpidamente tal y como demuestra la gran cantidad de publicaciones y reuniones cientficas realizadas durante los ltimos aos. Una de las razones principales de este crecimiento, aparte del enorme potencial de aplicaciones industriales ya citado, es que los robots mviles autnomos son un importante medio de investigacin y desarrollo de teoras sobre la conducta de los seres vivos al proporcionar una posibilidad de experimentacin. Valga como ejemplo de lo que supone esta posibilidad para la investigacin de la conducta de los seres vivos la siguiente frase tomada de un libro clsico de Ciencia Cognitiva: "Consideramos que podemos entender los fundamentos del comportamiento de las bacterias porque podemos construir robots que se comporten de manera anloga"[Johnson-Laird 90]. Para los agentes inteligentes mviles, ya sean robots o seres vivos, la capacidad de localizarse, orientarse y planificar caminos es de la mayor importancia. Esta capacidad de navegacin requiere, no solo una conducta reactiva, sino tambin la capacidad de interpretar la informacin respecto a objetivos globales, interaccin inteligente con el entorno, y capacidad de recuperacin ante errores. La navegacin es por lo tanto un medio ideal para la comprobacin e investigacin de las teoras sobre conducta inteligente. Es decir los robots mviles sirven a las ciencias dedicadas al estudio de la mente como banco de prueba de sus teoras. Esta influencia es recproca si consideramos que el estudio de la conducta de los organismos vivos nos puede ayudar en el estudio de la conducta de los mecanismos artificiales. Los principios extrados de la gran cantidad de datos almacenados sobre la conducta animal pueden ser utilizados para mejorar el diseo de los robots. Para el diseador de robots mviles autnomos es interesante el punto de vista otolgico segn el cual el robot debe ocupar su nicho ecolgico dentro de un
2. Palabras clave:
Vehiculos autnomos, agentes inteligentes, UAV, UGV, UMV.
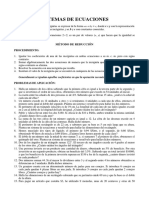
3. Introduccion:
Si bien desde hace algunas dcadas los vehculos no tripulados han sido motivo de inters, en particular en el mbito militar, no ha sido hasta los ltimos aos que han pasado de sistemas experimentales a equipos aptos para su uso profesional. Su actual capacidad de desarrollar misiones reales se ha visto difundida no solo en los mbitos restringidos de los investigadores, fabricantes o usuarios afines a esta tecnologa, sino que tambin ha sido dada a conocer, por diferentes medios, a la opinin pblica general, que comienza a conocer su existencia y utilidad. Su uso exitoso en los ltimos conflictos blicos ha impulsado de manera notoria su inters desde el sector defensa, que fue el primer promotor de su desarrollo, arrastrando a la industria especializada en este sector a dedicar esfuerzos al perfeccionamiento de los elementos que forman parte de estos vehculos autnomos, como son la instrumentacin para el guiado, navegacin y control, las comunicaciones o los sistemas de alimentacin, entre otros. Junto al inters en aplicaciones militares, la ampliacin de su uso a misiones civiles ha originado la aparicin de un nmero apreciable de grupos de investigacin y de pequeas empresas dedicados al desarrollo de los subsitemas, a la integracin de los mismos o a la puesta en marcha de aplicaciones y servicios basados en el uso de vehculos no tripulados. La tecnologa, en particular en el mbito civil, es todava incipiente. Su uso extendido debe vencer una serie importante de obstculos, que van desde los estrictamente tcnicos, hasta los puramente legales,
mundo compartido con otros agentes y desde el que debe llegar a cumplir su misin con xito. Como ha ocurrido tantas otras veces en la historia de la ciencia, la naturaleza es tambin en este campo una poderosa fuente de inspiracin. Los robots de esta nueva generacin deben ser capaces de compartir ms estrechamente las actividades de los seres humanos y para ello deben ser capaces de desenvolverse en un mundo en evolucin al que deben adaptarse, quiz utilizando los mismos medios que los seres humanos, mediante una labor continua de aprendizaje: por experimentacin, por imitacin, por el uso de materiales didcticos, o con la ayuda de un agente externo actuando como profesor.
Existen diferentes tipos de agentes autnomos:
5. Agentes autnomos Inteligentes
Los agentes tienen su origen en la psicologa, inteligencia artificial, y la inteligencia artificial distribuida, integrando aspectos de aprendizaje, planeacin, razonamiento, representacin de conocimiento, y tienen como objetivos ejecutar tareas complejas en beneficio de los usuarios, que de otra manera seran difciles de lograr. Los usuarios tienen la posibilidad de asignar objetivos a ser cumplidos por los agentes; en contraste a los sistemas de software convencionales que limitan a los usuarios a objetivos previamente especificados que no pueden alterarse. Un agente es todo aquello que puede considerarse que percibe su ambiente mediante sensores y que responde o acta en tal ambiente por medio de efectores (Rusell & Norvig 1995). Un agente autnomo es aquel cuya conducta se basa principalmente en su propia existencia, aunque pudiendo utilizar cierto conocimiento ya integrado. As como la evolucin ha dotado a los animales con una dotacin suficiente de reflejos incorporados a fin de que sobrevivan lo suficiente hasta que sean capaces de aprender por si mismos, tambin es razonable dotar a un agente inteligente con ciertos conocimientos iniciales y de habilidad para aprender. Cuando un agente acta basndose en suposiciones en l integradas, su comportamiento ser satisfactorio slo en la medida en que tales suposiciones sean vigentes, y por ello carecer de flexibilidad. Un autntico agente autnomo deber ser capaz de funcionar satisfactoriamente en una amplia gama de ambientes, considerando que se le de tiempo suficiente para adaptarse. Hay poca o ninguna dependencia en representaciones abstractas del mundo, y los comportamientos en lugar de los planes son el medio por los cuales el robot interacta con el mundo.
Agentes humanos tienen rganos, como ojos y odos, que sirven de sensores, mientras que partes del cuerpo, como manos, piernas y boca, sirven de efectores. Agentes robticos sustituyen sensores por cmaras y lectores, por ejemplo, infrarrojos o de ultrasonido, y los efectores son reemplazados mediante motores. En este artculo nos vamos a centrar en este tipo de agentes ya que son los ms comunes en aplicaciones de vehculos inteligentes. Agentes de software reciben percepciones y ejecutan acciones que tiene como formato cadenas de bits codificados.
Fig.1 Esquema de agente autnomo.
6. Caracteristicas de los agentes:
Un agente va a venir caracterizado por una serie de calificativos, los cuales vienen a denotar ciertas propiedades a cumplir por el agente: Continuidad Temporal: se considera un agente un proceso sin fin, ejecutndose continuamente y desarrollando su funcin. Autonoma: un agente es completamente autnomo si es capaz de actuar basndose en su experiencia. El agente es capaz de adaptarse aunque el entorno cambie severamente. Por otra parte, una definicin menos estricta de autonoma sera cuando el agente percibe el entorno. Sociabilidad: este atributo permite a un agente comunicar con otros agentes o incluso con otras entidades. Racionalidad: el agente siempre realiza lo correcto a partir de los datos que percibe del entorno. Reactividad: un agente acta como resultado de cambios en su entorno. En este caso, un agente percibe el entorno y esos cambios dirigen el comportamiento del agente. Pro-actividad: un agente es pro-activo cuando es capaz de controlar sus propios objetivos a pesar de cambios en el entorno.
Adaptabilidad: est relacionado con el aprendizaje que un agente es capaz de realizar y si puede cambiar su comportamiento basndose en ese aprendizaje. Movilidad: capacidad de un agente de trasladarse a travs de una red telemtica. Veracidad: asuncin de que un agente no comunica informacin falsa a propsito. Benevolencia: asuncin de que un agente est dispuesto a ayudar a otros agentes si esto no entra en conflicto con sus propios objetivos. No existe un consenso sobre el grado de importancia de cada una de estas propiedades para un agente. Sin embargo, se puede afirmar que estas propiedades son las que distinguen a los agentes de meros programas.
del ambiente Pueden tener conocimiento No tienen memoria del pasado Agentes complejos Pocos agentes Funcionamiento estmulo/respuesta Muchos agentes
Figura 4. Clasificacin de sistemas de agentes
8. Arquitectura de un Agente Cognitivo
La estructura interna de un agente cognitivo se puede clasificar de manera general as:
Fig.2 Navaja suiza de Parunak representando los conceptos que puede integrar un agente.
7. Agentes Cognitivos y Reactivos
Un AGENTE COGNITIVO es aquel que es capaz de efectuar operaciones complejas, es individualmente inteligente (es un sistema ms o menos experto, con capacidad de razonamiento sobre su base de conocimiento), puede comunicarse con los dems agentes y llegar a un acuerdo con todos o algunos de ellos, sobre alguna decisin. Un sistema cognitivo est compuesto por un pequeo nmero de agentes cognitivos. Un AGENTE REACTIVO es un agente de bajo nivel, que no dispone de un protocolo ni de un lenguaje de comunicacin y cuya nica capacidad es responder a estmulos. Los agentes reactivos no son individualmente inteligentes, sino globalmente inteligentes. Los sistemas reactivos por lo general estn compuestos por un gran nmero de agentes reactivos que realizan acciones entre todos, para esto es necesario tener en cuenta nuevas teoras de cooperacin y comunicacin que permitan el desempeo de estas acciones (Figura 3). Es posible concebir sistemas heterogneos cuyo comportamiento se derive de los dos tipos de agentes y tenga caractersticas de ambos. Es decir, es posible dotar a los agentes cognitivos de capacidades de reaccin a los eventos, a tales agentes se les puede llamar AGENTES HBRIDOS. Sistemas Cognitivos Representacin Sistemas Reactivos
Figura 5. Arquitectura de un agente cognitivo. 8.1 Funcionalidad Es el conjunto de funciones o tareas que el agente sabe hacer y que los dems agentes pueden conocer que l hace. Dentro de estas funciones pueden estar las funciones de comunicacin con otros agentes, de seleccin de agentes para una tarea especfica, de obtener informacin del sistema, de informacin del estado interno del agente, etc. 8.2 Creencias Son el conocimiento subjetivo o conjunto de opiniones que el agente tiene de l mismo y de los dems agentes. Puede comenzar como una opinin o conocimiento inicial y cambiar con las acciones y desempeo de cada uno de los agentes, incluido l mismo, cuando el sistema est en funcionamiento. 8.3 Conocimiento Es el conocimiento que cada agente tiene y que usa para la resolucin de un problema, es decir, es la representacin de lo que sabe y del conocimiento que ha adquirido en experiencias pasadas y que le sirve para hallar soluciones o seleccionar acciones a seguir en cualquier momento. El conocimiento le permite al agente entender el mundo, lo que los dems agentes tratan de decirle y sus razonamientos internos y explicar sus ideas y decisiones a los dems agentes. Hay tres clases de conocimiento importantes a tener en cuenta:
explcita No tiene
8.4 Control El control en un agente est representado por la estructura local de metas que el agente tiene. Para un manejo ms efectivo de estas estructuras se adicionan los conceptos de intenciones, planes y acciones que el agente tiene. 8.4.1 Metas: Las metas u objetivos, son el conjunto de estados deseables en el ambiente en el que se desenvuelve un agente. Un agente puede decidir alcanzar o no cada una de tales metas de acuerdo a las ventajas que esta represente. En un SMA (sistema multi -agente) hay una meta global o principal que debe ser alcanzada con la colaboracin de todos los agentes del sistema. Esta meta global puede ser dividida en submetas, las cuales son asignadas como metas a los agentes del sistema, de acuerdo a alguna poltica organizacional. Los planes que desarrolle cada agente para alcanzar estas submetas, pueden ser combinados para alcanzar la meta global. Es decir, los planes que desarrolle un agente para alcanzar sus metas, contribuirn a alcanzar las metas globales del sistema. 8.4.2 Plan: Es un conjunto de estrategias para resolver un problema o alcanzar una meta [Sin93]. Como se dijo en la descripcin de Metas, la meta global puede ser dividida en submetas, las cuales son asignadas como metas a los agentes del sistema. Los planes que desarrolla cada agente para alcanzar su propia meta, pueden ser combinados para desarrollar un plan global que sirve para alcanzar la meta global . Se puede decir que: "Un agente sabe cmo alcanzar a p slo si l conoce que algn plan P contempla a p, y l es capaz de ejecutarlo." Los planes son una de las plataformas para el desarrollo de mecanismos de coordinacin, porque describen a alto nivel el comportamiento de los agentes y por ello posibilitan la prediccin de las acciones de un agente. Esta prediccin permite que un agente acte de manera coherente con las acciones de los dems agentes. 8.4.3 Estrategias: Una estrategia es la descripcin de las acciones de los agentes a un nivel grueso de detalle, corresponden a abstracciones de los posibles comportamientos de los agentes y hacen ms simple entender, especificar e implementar agentes inteligentes. Las estrategias no adicionan habilidades a los agentes, simplemente ayudan a disear, analizar y organizar mejor las destrezas que los agentes ya poseen. Se puede usar las estrategias para describir agentes que no tienen un plan especfico, es decir, que no representan ni describen simblicamente el conjunto de acciones a seguir; por lo tanto puede haber estrategias que no correspondan a un plan. 8.4.4Intenciones: Una intencin se puede definir como el objetivo concreto o el fin que se pretende alcanzar al realizar una o varias acciones, este objetivo se puede describir con proposiciones lgicas. Las metas adoptadas por un agente son las intenciones (Las metas que un agente decide alcanzar). Se puede decir que las intenciones son la causa de las acciones de un agente. Por otro lado, un agente realiza acciones tratando de seguir sus estrategias.
Estudiar las intenciones es importante, porque de ellas se deriva la capacidad con la cual los agentes pueden usar conceptos para predecir y explicar el comportamiento de otros agentes, adems, son muy tiles porque son abstracciones de los estados y comportamiento de los agentes. Cuando un agente tiene varias intenciones, stas tienen que ser mutuamente consistentes o por lo menos intentar que as lo sean, y tambin deben ser consistentes con el conocimiento y las experiencias adquiridas en el pasado. Si un agente cree algo (p) o lo conoce por experiencia del pasado, intentar hacerlo; pero si por el contrario no cree en l o sabe que algo no es as (-p), no lo intentar. Las intenciones de dos o ms agentes pueden no ser mutuamente consistentes, ya que pueden estar compitiendo por algn recurso. Una intencin puede ser confundida con hacer algo intencionalmente, sin embargo, una intencin es querer hacer algo y hacer intencionalmente se refiere a las acciones y estados que un agente realiza a propsito. Un agente puede adoptar y modificar sus intenciones basndose en su conocimiento.
Figura 6. Relacin entre estrategias, metas, intenciones y acciones.
9. Los Robots Inteligentes Autnomos
Estn situados en su entorno, adoptan comportamientos, razonan, evolucionan y actan como seres vivos. Al menos seis campos de investigacin estructuran hoy la robtica avanzada: la que relaciona al robot con su entorno, la conductual, la cognitiva, la epigentica o de desarrollo, la evolutiva y la biorrobtica. Es un gran campo de estudio interdisciplinar que se apoya en la ingeniera mecnica, elctrica, electrnica e informtica, as como en las ciencias fsicas, anatoma, psicologa, biologa, zoologa y etologa, entre otras. El fundamento de estas investigaciones es la Ciencia Cognitiva Corporizada y la Nueva Inteligencia Artificial. Su finalidad: alumbrar robots inteligentes y autnomos que razonan, se comportan, evolucionan y actan como las personas. En esencia, los robots inteligentes autnomos son sistemas dinmicos que consisten en un controlador electrnico acoplado a un cuerpo mecnico. As, estas mquinas necesitan de adecuados sistemas sensoriales (para percibir el entorno en donde se
desenvuelven), de una precisa estructura mecnica adaptable (a fin de disponer de una cierta destreza fsica de locomocin y manipulacin), de complejos sistemas efectores (para ejecutar las tareas asignadas) y de sofisticados sistemas de control (para llevar a cabo acciones correctivas cuando sea necesario). 9.1 Robtica Situada (Situated Robotics) Este enfoque se ocupa de los robots que estn insertos en entornos complejos y, a menudo, dinmicamente cambiantes. Se basa sobre dos ideas centrales: los robots a) estn corporizados (embodiment), es decir, tienen un cuerpo fsico apto para experimentar su entorno de manera directa, en donde sus acciones tienen una realimentacin inmediata sobre sus propias percepciones, y b) estn situados (situatedness), o sea, estn inmersos dentro de un entorno; interaccionan con el mundo, el cual influye de forma directa sobre su comportamiento. Obviamente, la complejidad del entorno tiene una relacin estrecha con la complejidad del sistema de control. En efecto, si el robot tiene que reaccionar rpida e inteligentemente en un ambiente dinmico y desafiante, el problema del control se torna muy difcil. Si el robot, en cambio, no necesita responder de manera rpida, se reduce la complejidad requerida para elaborar el control. Dentro de este paradigma, se encuentran varios subparadigmas: la robtica basada en el comportamiento (generan un comportamiento slo cuando se los estimula), la robtica cognitiva, la robtica epigentica (trata de implementar sistemas de control de propsito general, a travs de un prolongado proceso de desarrollo o auto-organizacin autnoma), la robtica evolutiva (aplica los conocimientos obtenidos de las Ciencias Naturales) y la robtica biomimtica (Esta aproximacin se ocupa de disear robots que funcionan como los sistemas biolgicos). No centraremos principalmente en la robotica cognitiva. 9.2 Robtica Cognitiva (Cognitive Robotics) Esta aproximacin utiliza tcnicas provenientes del campo de las Ciencias Cognitivas. Se ocupa de implementar robots que perciben, razonan y actan en entornos dinmicos, desconocidos e imprevisibles. Tales robots deben tener funciones cognitivas de muy alto nivel que impliquen razonar, por ejemplo, acerca de las metas, las acciones, el tiempo, los estados cognitivos de otros robots, cundo y qu percibir, aprender de la experiencia, etc. Para eso, deben poseen un modelo simblico e interno de su entorno local, y la suficiente capacidad de razonamiento lgico para tomar decisiones y para ejecutar las tareas necesarias a fin de alcanzar sus objetivos. En pocas palabras, esta lnea de trabajo se ocupa de implementar caractersticas cognitivas en los robots, tales como percepcin, formacin de conceptos, atencin, aprendizaje, memoria a corto y largo plazo, etc.
Si se consigue que los robots desarrollen por s mismos sus capacidades cognitivas, se evitara el programarlos a mano para cada tarea o contingencia concebible . Asimismo, si se logra que los robots utilicen representaciones y mecanismos de razonamiento similares a la de los humanos, se podra mejorar la interaccin hombre-mquina, as como las tareas de colaboracin. Sin embargo, se necesita un elevado poder de procesamiento (en especial si el robot cuenta con numerosos sensores y actuadores) y mucha memoria (para representar el espacio de estados).
10. Aplicacin de la robtica cognitiva en vehculos autnomos inteligentes
10.1 Definicion y clasificacion de vehculos autnomos: Definicion : Es cualquier vehculo no tripulado con cierto nivel de autonoma integrada (ello incluye desde vehculos teleoperados hasta vehculos totalmente inteligentes). Tipos:
Marinos (Unmmaned Maritime Vehicle) Areos (Unmmaned Aerial Vehicle) Terrestres (Unmmaned Ground vehicle)
Existe en la actualidad un espectro amplio de posibles vehiculos con capacidad de realizar misiones con cierto grado de autonoma. La novedad de su llegada a las aplicaciones civiles dificulta la existencia de un consenso en su definicin, que cuestiona, en determinadas ocasiones, si un determinado sistema responde o no al concepto de Unmmaned vehicle. Existe por ello cierta variedad de trminos que, con mayor o menor acierto, son utilizados para referirse a este tipo de vehiculos. Puesto que la definicin anterior no excluye el telecontrol de la aeronave, cabe definir tambin aeronave autnoma o sistema areo autnomo (AAS: Autonomous Aerial System) para el caso de vehculos areos, como aqul capaz de desarrollar la misin sin necesidad de intervencin humana.
10.2 Vehiculos autnomos marinos: Aparte de las las aplicaciones militares que, como se ha comentado antes, han impulsado el desarrollo de estos vehculos para labores de deteccin de minas y proyectiles inteligentes, se han venido desarrollando diversas aplicaciones de la inteligencia artificial en la autonoma de estos vehculos marinos en el mbito de la investigacin, reconocimiento y reparacin de instalaciones submarinas.
Aplicaciones educacionales y de investigacin: Biologa Marina Arqueologa Marina Monitoreo de ecosistemas Tecnologas del fondo del mar Estudios de hbitat marino Estudios de migracin Estudios geolgicos Muestreo de aguas y sedimentos Muestreo de especies marinas. Fig 7.Vehiculo de neutralizacin de minas. SPRAY: El pequeo vehculo subacutico autnomo (AUV por sus siglas en ingls), al que se le dio el nombre de "Spray", fue lanzado recientemente a unas 12 millas al sudeste de las Islas Bermudas. Los cientficos Breck Owens de la Woods Hole Oceanographic Institution, y Russ Davis y Jeff Sherman de la Scripps Institution Of Oceanography en la Universidad de California, seguirn su progreso durante la misin, y se comunicarn va satlite con el vehculo para cambiar su curso o efectuar otras operaciones. Inspecciones de tuberas y cables submarinos (Elctricos y de comunicaciones) Mapeo de precisin del fondo marino para evaluaciones hidrogrficas y planeacin de cables submarinos y tuberas sumergidas.ns Soporte logstico para instalaciones de cable, tubera y construccin submarina. Evaluacin ambiental de sitios de descarte de desechos crticos ambientales. fig9. AUSS. Otra gran aplicacin de los vehculos autnomos submarinos es la reparacin de instalaciones submarinas, ms concretamente:
fig. 10.robot submarino Lejos de las altas inversiones para investigacin o aplicaciones militares la robtica autnoma marina tambin ha llegado a los hogares, como es el caso del robot limpia-piscinas al alcance de cualquier ciudadano.
fig 8 Spray Existen algunos vehculos no tripulados semiautonomos para la identificacin y recuperacin de objetos submarinos como es el caso del AUSS (Advanced unmmaned search system) desarrollado por un grupo de ingenieros de San Diego (USA), aunque no es un vehiculo completamente autnomo puede servir de base de desarrollo para implementar robots de este tipo.
fig. 11. limpia-piscinas
10.3 Vehiculos autnomos aereos: Si bien fue en el sector militar donde surgieron los UAV y el que ha impulsado su desarrollo, desde hace 15 aos han surgido diferentes aplicaciones civiles, que han ampliado el inters, la investigacin y el desarrollo de estos sistemas, a la vez que han originado nuevos requisitos en su operatividad, y generando un mayor espectro de sistemas. As mientras que en aplicaciones militares la mayor parte de los UAV existentes son del tipo aeroplano, para aplicaciones civiles, la maniobrabilidad y capacidad de vuelo estacionario de los helicpteros ha hecho que sea este tipo de aeronave el ms frecuente. A continuacin se muestran algunos ejemplos de aplicaciones civiles de vehiculos no tripulados: Filmografia: cine Climatologia: Monitorizacion de la contaminacin atmosfrica. Agricultura: Aplicacin de fumigantes Levantamiento de mapas. Topografia Busqueda y rescate : Naufragios. Medioambientales : deteccin de fuego Comunicaciones.Conmutador emergente de comunicaciones Monitorizacin de autopistas. Control de fronteras.
deteccin de objetivos, visin en tiempo real del campo de batalla, combate areo, suministros logticos, sensores para guerra qumica y bacteriolgica, dispersin de humo para camuflaje, etc.), como es el caso del Global Hawk: Los aparatos ''Global Hawk'', que entraron en servicio en el 2003, aumentan la flota de aviones sin piloto que emplean las fuerzas militares de Estados Unidos para operaciones que incluyen espionaje, comunicaciones, identificacin de objetivos y disparo de misiles.Esta flota cuenta con aparatos tan diversos como el ''Predator'', que entr en operaciones en el 2005, cuesta unos $40 millones y es capaz de transportar misiles teledirigidos. Este aparato pesa 515 kilogramos, tiene un ala de 15 metros, un radio de accin de unos 650 kilmetros y una capacidad de 40 horas de vuelo. En el otro extremo de tamao estn los ''Raven'', que pesan 2.5 kilogramos, cuestan unos $35,000, tienen una capacidad de vuelo de 40 a 60 minutos, y se emplean principalmente para observacin. El ''Global Hawk'' cuesta $80 millones, tiene un ala de 40 metros, puede volar durante 40 horas en misiones a una velocidad de 635 kilmetros por hora, hasta 19,800 metros de altura y en distancias de 16,000 kilmetros.
El uso de un UAV que, an siendo telecontrolado incorpore la instrumentacin necesaria para su estabilizacin automtica e inteligente y para su guiado de manera simple, con instrucciones de alto nivel (proporcionadas generalmente por un mando de tipo joystick), elimina o disminuye notablemente inconvenientes como la falta de contacto visual entre el piloto y la aeronave o la inestabilidad por inclemencias del tiempo. El APID55 es un pequeo helicptero no tripulado, capaz de despegar, aterrizar y volar autnomamente, sin necesidad de personal en tierra dndole soporte en tiempo real para el control de vuelo o navegacin. El helicptero APID55 puede, equipado con diversos tipos de sensores adecuados a la misin y conectado a una estacin de control en tierra, realizar diferentes tareas como fotografa area, control de fronteras, bsqueda de objetivos o vigilancia.
Tambin tenemos el homologo europeo desarrollado por EADS: el Talarion:
fig. 14: Talarion. Fig 12: APID55 A pesar del gran numero de aplicaciones civiles, el desarrollo de esta clase de vehculos areos enteramente autonomos est prcticamente orientada en su totalidad a objetivos militares (Supervivencia,
10.4 Vehculos autnomos terrestres: En el mbito terrestre se estn desarrollando interesantes proyectos de cara a la investigacin cientfica espacial y en sistemas inteligentes de transporte (ITS) aparte de los desarrollos militares como vehculos buscadores de minas, espionaje o tanques no tripulados. En la carrera de la conquista del espacio se han desarrollado diversos robots completamente autnomos capaces de explorar la superficie de marte analizando la composicin de minerales, tomando muestras del aire, enviando fotos y videos, capaces de moverse y sortear obstculos en terrenos hostiles todo de forma completamente autnoma. Esto ha sido un gran paso en el desarrollo de la inteligencia artificial y agentes cognitivos que ayudaran a desarrollar aun mas estas tecnologas.
circulacin en las carreteras de acceso a las ciudades o proporcionando informacin a los conductores mediante seales electrnicas a lo largo de las carreteras. Los sistemas avanzados de informacin al conductor estn empezando a aparecer en algunos modelos de vehculos como opcin. Son sistemas navegacionales en los que los conductores introducen sus destinos. Aparece entonces la mejor ruta posible en forma de mapa electrnico en una pequea pantalla o en forma de voz sintetizada que ofrece instrucciones durante el viaje. Estos sistemas usan un dispositivo de transmisin/recepcin (contestadores) en el vehculo y un sistema global de posicin, empleando satlites artificiales para determinar la ubicacin exacta del vehculo a lo largo de su recorrido. Acompaado de tecnologa de radio celular, este sistema de navegacin sirve adems para comunicar con un control central en caso de emergencia. Las tecnologas de control automatizado de vehculos se estn desarrollando para mejorar la seguridad en carretera. Estos dispositivos, situados a bordo del vehculo, pueden avisar al conductor para impedir un peligro determinado o, en una emergencia, corregir sus acciones. Se ha adaptado un sistema de radar para uso en los autobuses de escuela de manera que detecten a una persona cerca del vehculo y alerten al conductor. Los radares y otros tipos de sensores se utilizan tambin para detectar si algn otro vehculo se encuentra en el ngulo muerto del conductor, es decir, en una posicin en la que no estn visibles en los espejos retrovisores. Tambin se estn estudiando sensores de infrarrojos y otros mtodos de mejora visual para incrementar la seguridad en la circulacin nocturna o en condiciones climticas adversas. El proyecto de sistema de transporte inteligente ms ambicioso es la autopista automatizada, donde los vehculos podrn viajar a grandes velocidades pero en cortos intervalos, mediante el uso del radar incorporado, la posicin del vehculo y los sensores del motor, que actan sobre los sistemas de aceleracin y de frenado, y de conexiones informatizadas entre los vehculos. Los vehculos comerciales, camiones y autobuses tambin estn aprovechando cierto nmero de tecnologas ITS. Los contestadores permiten a estos vehculos el pago de peajes, la obtencin de permisos o licencias y la realizacin de otras funciones rutinarias mientras se encuentran en movimiento, ahorrando as el tiempo y el gasto de realizar paradas. La recaudacin electrnica de peajes para vehculos de pasajeros es una realidad hoy en ciertas reas metropolitanas. Est cada vez ms claro que construir ms carreteras no es la solucin a los problemas del transporte. Mediante el uso de equipos informticos y dispositivos de comunicacin, la infraestructura de transporte (sistemas de carretera y los vehculos que los usan) puede pasar a ser ms inteligente, y por lo tanto, reducir los atascos, disminuir las emisiones de los vehculos en trfico intermitente, reducir el tiempo de viaje, aumentar la capacidad de las carreteras existentes y hacer ms seguros los desplazamientos por carretera.
Fig. 15: Prototipo para exploracin espacial Los Sistemas de transporte inteligente, conocidos tambin como ITS, son tecnologas que incluyen electrnica avanzada, comunicaciones y sistemas informticos para aumentar la eficiencia y seguridad del transporte por carretera. Conocidas originalmente como IVHS (iniciales de Intelligent Vehicle/Highway Systems, Sistemas inteligentes de automviles y autopistas), proporcionan intercambio de informacin en tiempo real entre los conductores y las autopistas, de ah los trminos "automviles inteligentes" o "autopistas inteligentes". Como las tecnologas se han expandido para incluir transporte pblico y vehculos comerciales, este rango de tecnologas ha terminado por llamarse sistema de transporte inteligente. Con el tiempo, los conductores tendrn acceso a la ltima informacin acerca de las condiciones de circulacin (incluyendo atascos y accidentes), selecciones de rutas, direcciones de destino poco familiares y es posible que hasta control automatizado del vehculo. La gestin o administracin de la circulacin es un rea en la que se estn utilizando sistemas avanzados de electrnica para mejorar el control del trfico o trnsito rodado. En algunas ciudades, la circulacin de las principales carreteras se controlan mediante cmaras de vdeo, radares o sensores en la propia carretera. Un sistema de ordenador/computadora central analiza la informacin. Si la circulacin est congestionada o atascada, el flujo de circulacin mejora de modo automtico ajustando los intervalos de seales de trfico, controlando el flujo de
http://www.neoteo.com/aida-el-asistente-roboticodel-mit.neo [3] Asistente robotico desarrollado por NISSAN http://www.nissan-global.com/EN/PIVO2/index.html [4].Comunicacion entre vehculos autonomos tiempo real para maniobras de alto riesgo.(instituto de automtica industrial) [5] Robotica HTUhttp://robotica.esUTH Fig. 16: Automovil inteligente Numerosos investigadores en todo el mundo trabajan en el desarrollo del vehculo inteligente del maana, que ser capaz de conducir sin ayuda humana, una ficcin que, segn los investigadores, debera ser una realidad de aqu a 2030. El desarrollo militar en el campo terrestre tambin ha sido bastante amplio cubriendo desde robots, buscaminas, tanques autnomos etc. HTUhttp://roboticslab.uc3m.es/roboticslab/ [6] Vehculos areos no tripulados. Tesis universidad politcnica de Madrid. [7]Agentes inteligentes, articulo de la universidad politcnica de valencia
11. Conclusiones
Los ejemplos comentados en este artculo no son ciencia ficcin, sino que describen lo que, se supone, nos espera de aqu a pocos aos. La IA ha dado un paso ms hacia delante. Existen ya prototipos que estn siendo probados tanto en el mbito acadmico como industrial y ya empiezan a aparecer los primeros productos comerciales. Cabe indicar que, como siempre ocurre cuando aparece una nueva tecnologa, no debemos pensar que todo son agentes y lo que haba antes no es vlido. Las opciones a la hora de emplear agentes, tal y como hemos descrito, son mltiples, pero no conviene creer que cualquier problema es tratable de forma sencilla con una aproximacin de sistema basado en agentes. Es posible que en ocasiones el empleo de tcnicas clsicas resulte ms adecuado en funcin de la naturaleza del problema a resolver. A esta primera hornada de productos comerciales la podramos denominar como la primera generacin de sistemas basados en agentes, dando quizs un poco ms a la razn a quien opina que los agentes constituyen la nueva revolucin en el Software. En concreto, el concepto de agente/ sistema multi-agente supone el siguiente paso en la evolucin de la IA y el enfoque con el que va a ser abordado en el futuro el desarrollo de sistemas inteligentes, en un cada vez ms amplio y diverso dominio de problemas como la medicina, la industria, comercio electrnico, entretenimiento, la educacin, etc.
12. Referencias
[1]. Transparencias de clase [2]. Asistente inteligente para coches desarrollado por el MIT
Vous aimerez peut-être aussi
- Autoestima 7 Pasos AumentarlaDocument47 pagesAutoestima 7 Pasos AumentarlaJessica Forero100% (2)
- Necesidad Del Grado de Real Arco para El Maestro MasónDocument5 pagesNecesidad Del Grado de Real Arco para El Maestro Masóncarneirojimenez67% (3)
- Cómo Crear Un Cultivo de Bacterias en CasaDocument4 pagesCómo Crear Un Cultivo de Bacterias en CasaCACERES ESTRADA IACOMO FERNANDOPas encore d'évaluation
- Dorotea Orem PDFDocument19 pagesDorotea Orem PDFMaría Isabel Benavides Roca100% (1)
- High School DXD V24Document183 pagesHigh School DXD V24Juanjose Tenorio Peña100% (2)
- Fin de II Quimestre Fisica 1ro BguDocument2 pagesFin de II Quimestre Fisica 1ro BguFRANKLIN SAGÑAYPas encore d'évaluation
- Sistemas de EcuacionesDocument5 pagesSistemas de EcuacionesAndrès SolizPas encore d'évaluation
- Fármacos Del Sistema Nervioso Central-1Document5 pagesFármacos Del Sistema Nervioso Central-1Jhon Alex CardenasPas encore d'évaluation
- TB-M01 Manual de TecnovigilanciaDocument38 pagesTB-M01 Manual de TecnovigilanciaJavi Armando SalamancaPas encore d'évaluation
- Estaciones de RadioDocument11 pagesEstaciones de RadioVal VázquezPas encore d'évaluation
- Red Velvet (YoonMin)Document97 pagesRed Velvet (YoonMin)Blue MoonPas encore d'évaluation
- Agricultura Vertical SostenibleDocument8 pagesAgricultura Vertical SostenibleAndrea C. Garrido L.Pas encore d'évaluation
- Avance III PresentaciónDocument12 pagesAvance III Presentacióndavid marceloPas encore d'évaluation
- Articulo Agricultura en Las Sociedades Antiguas de GuatemalaDocument7 pagesArticulo Agricultura en Las Sociedades Antiguas de GuatemalaEdgard GarcíaPas encore d'évaluation
- Recomendaciones Auditoria Antamina ChacongesaDocument15 pagesRecomendaciones Auditoria Antamina ChacongesaVicente Cond100% (1)
- Licopodio - (Lycopodium Clavatum) - WWW - Plantasyjardines.es PDFDocument2 pagesLicopodio - (Lycopodium Clavatum) - WWW - Plantasyjardines.es PDFManuel SierraPas encore d'évaluation
- SINDESMOLOGIA CUADRO FinalizadoDocument5 pagesSINDESMOLOGIA CUADRO FinalizadoNicolas MartinezPas encore d'évaluation
- Tarea 3 - Sistemas de Ecuaciones LinealesDocument9 pagesTarea 3 - Sistemas de Ecuaciones LinealesMARIA CAMILA VILLA MONTOYAPas encore d'évaluation
- Practica 2 de ProgramaciónDocument9 pagesPractica 2 de ProgramaciónYoel GutiérrezPas encore d'évaluation
- TrabajoDocument6 pagesTrabajodanielchancusig4Pas encore d'évaluation
- Guia BioseguridadDocument19 pagesGuia BioseguridadmarlenePas encore d'évaluation
- Estimación de Datos Faltantes, Ajuste de Datos Y Método de Doble AcumulaciónDocument21 pagesEstimación de Datos Faltantes, Ajuste de Datos Y Método de Doble AcumulaciónAndrea MorenoPas encore d'évaluation
- COMPRESORESDocument8 pagesCOMPRESORESAndres GarnicaPas encore d'évaluation
- MatemáticaDocument13 pagesMatemáticaCarolina SerranoPas encore d'évaluation
- Ejercicio de Costos2010-1Document4 pagesEjercicio de Costos2010-1Jose Luis ChicllaPas encore d'évaluation
- Las Cartas de Tarot Son 78 y Se Dividen en Dos GruposDocument3 pagesLas Cartas de Tarot Son 78 y Se Dividen en Dos GruposlisandroalvradoPas encore d'évaluation
- Puente de TacomaDocument3 pagesPuente de TacomaRicardo Armando Arenales MínchezPas encore d'évaluation
- Unidad 5. Muestreo SistemáticoDocument17 pagesUnidad 5. Muestreo SistemáticoSergio Miguel Polanco Santos100% (1)
- Plaza de Mercado La ConcordiaDocument4 pagesPlaza de Mercado La ConcordiaMaria Natalia Morales SilvaPas encore d'évaluation