Vous aimerez peut-être aussi
- Vargas Garnica Andres Ricardo 11Document22 pagesVargas Garnica Andres Ricardo 11Andres VargasPas encore d'évaluation
- 00037843Document48 pages00037843AmuletoRojasPas encore d'évaluation
- Modelo de Movimiento Forzado Con AmortiguaciónDocument12 pagesModelo de Movimiento Forzado Con Amortiguacióndammaqui100% (1)
- Informe Final Matematica 3Document24 pagesInforme Final Matematica 3ALDER GUSMANPas encore d'évaluation
- Modelamiento de Sistemas Eléctricos y MecanicosDocument23 pagesModelamiento de Sistemas Eléctricos y MecanicosEmilyRiveraTovarPas encore d'évaluation
- HathDocument63 pagesHathDanielContrerasContrerasPas encore d'évaluation
- Formulario EdDocument2 pagesFormulario EdJerzayn RoldanPas encore d'évaluation
- Sgdo Parcial MATE I 2022-II LNDocument8 pagesSgdo Parcial MATE I 2022-II LNJet Ruiz sanchezPas encore d'évaluation
- Prob. 3D: Coord Intrinseco R=cte V =cte V=θDocument9 pagesProb. 3D: Coord Intrinseco R=cte V =cte V=θNMPas encore d'évaluation
- Formulario Trigonometria PDFDocument3 pagesFormulario Trigonometria PDFLuigi OrtiɀPas encore d'évaluation
- Conduccion Bidimensional en Estado EstableDocument9 pagesConduccion Bidimensional en Estado Estableorion_rjPas encore d'évaluation
- Cuaderno Fisica 2 Escalante UNMSMDocument108 pagesCuaderno Fisica 2 Escalante UNMSMCarlos Silva EspinozaPas encore d'évaluation
- Formulario de Calculo IntegralDocument3 pagesFormulario de Calculo Integralpiolin85Pas encore d'évaluation
- 02calculo de Tensiones PrincipalesDocument27 pages02calculo de Tensiones Principalesccof andPas encore d'évaluation
- Tarea de Fasores PDFDocument8 pagesTarea de Fasores PDFCarlos Fuentes MirandaPas encore d'évaluation
- Formulario de Calculo Diferencial e Integral (Nxpowerlite)Document2 pagesFormulario de Calculo Diferencial e Integral (Nxpowerlite)Alexander MontellanoPas encore d'évaluation
- Dinamica Ejercicios ResueltosDocument10 pagesDinamica Ejercicios ResueltosAnthony CatuntaPas encore d'évaluation
- Transformada - Antitransformada de LaplaceDocument6 pagesTransformada - Antitransformada de LaplaceTony YespaPas encore d'évaluation
- Método de Newton RaphsonDocument8 pagesMétodo de Newton RaphsonGLORIA STHEFANYPas encore d'évaluation
- Formulario de Calculo Diferencial e IntegralDocument2 pagesFormulario de Calculo Diferencial e IntegralAnthony Otazú RamosPas encore d'évaluation
- RecursividadDocument46 pagesRecursividadKarem AguirrePas encore d'évaluation
- Tarea 1 - Marco RinconDocument15 pagesTarea 1 - Marco Rinconmarco ricon100% (1)
- Ets Transformada de FuncionesDocument12 pagesEts Transformada de FuncionesSadiko ArukartPas encore d'évaluation
- Tareas T Picos Julian Mendez Mario VargasDocument15 pagesTareas T Picos Julian Mendez Mario VargasIsabel GilPas encore d'évaluation
- 02 Transformada ZDocument31 pages02 Transformada ZIsmael MinchalaPas encore d'évaluation
- ControlDocument14 pagesControlWald HaryPas encore d'évaluation
- Formulario Laplace PDFDocument2 pagesFormulario Laplace PDFCastín MartilloPas encore d'évaluation
- Transform Ada Laplace Diferenciales Ejercicios ResueltosDocument28 pagesTransform Ada Laplace Diferenciales Ejercicios Resueltosmaaleman1985Pas encore d'évaluation
- Solucionario Parcial 2016 - IDocument7 pagesSolucionario Parcial 2016 - ICarlos Cuya PradoPas encore d'évaluation
- Formula Rio en LaTexDocument7 pagesFormula Rio en LaTexErikPas encore d'évaluation
- Cepuns 2013-II Semana 06Document6 pagesCepuns 2013-II Semana 06boc_55Pas encore d'évaluation
- Formulario Matemático.Document3 pagesFormulario Matemático.Omar Felipe Santiago Barajas100% (1)
- Mathcad Transferencia PDFDocument22 pagesMathcad Transferencia PDFEduardo AlanizPas encore d'évaluation
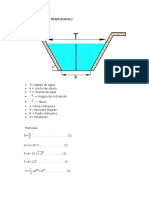
- Diseño de Canal C. HidroeletricaDocument6 pagesDiseño de Canal C. HidroeletricaCarlos CotrinaPas encore d'évaluation
- Circuitos 2Document5 pagesCircuitos 2Joel MartinezPas encore d'évaluation
- Circuitos 2Document5 pagesCircuitos 2Joel MartinezPas encore d'évaluation
- 9.respuesta en El Tiempo de Sist - de 2do. OrdenDocument14 pages9.respuesta en El Tiempo de Sist - de 2do. OrdenSantiago F Solarte FPas encore d'évaluation
- Taller 3 208046 Arlinson UsecheDocument10 pagesTaller 3 208046 Arlinson UsecheArlinson Useche ZamoraPas encore d'évaluation
- Ejercicios Resueltos de Integracion Con Variable ComplejaDocument11 pagesEjercicios Resueltos de Integracion Con Variable ComplejaFranciscoOlsenCandiotti100% (1)
- Escalera MecanicaDocument13 pagesEscalera MecanicaJon BrownPas encore d'évaluation
- Problemas de Fourier ComplejaDocument25 pagesProblemas de Fourier ComplejaLandMarchenaPas encore d'évaluation
- Ejercicios Resueltos Calculo Vectorial LarssonDocument19 pagesEjercicios Resueltos Calculo Vectorial LarssonRichard CalvachePas encore d'évaluation
- Ecuaciones Diferenciales de RicattiDocument4 pagesEcuaciones Diferenciales de RicattiAMYNNXXXX100% (3)
- Métodos Dinámicos en Economía - HéctorDocument46 pagesMétodos Dinámicos en Economía - HéctorGermán SantillánPas encore d'évaluation
- Cuaderno Digital 2Document67 pagesCuaderno Digital 2Jairo RamirezPas encore d'évaluation
- Laboratorio de EcuacionesDocument5 pagesLaboratorio de EcuacionesAleja Games (Crayo- LyLy)Pas encore d'évaluation
- Ejercicios 13Document8 pagesEjercicios 13MscJaiderBlancoPas encore d'évaluation
- Peps 1 Calculo AvanzadoDocument83 pagesPeps 1 Calculo AvanzadoAlejandro Ponce ArayaPas encore d'évaluation
- Aplicacion Funcion VectorialDocument37 pagesAplicacion Funcion VectorialSergio Garcia Alfaro100% (1)
- Trabajo Grupal de Ecuaciones DiferencialesDocument27 pagesTrabajo Grupal de Ecuaciones DiferencialesLeviatannlpPas encore d'évaluation
- Problemas resueltos de Hidráulica de CanalesD'EverandProblemas resueltos de Hidráulica de CanalesÉvaluation : 4.5 sur 5 étoiles4.5/5 (7)
- La ecuación general de segundo grado en dos y tres variablesD'EverandLa ecuación general de segundo grado en dos y tres variablesPas encore d'évaluation
- Unidad 3 Poligonal AbiertaDocument17 pagesUnidad 3 Poligonal AbiertaGonzalo Rodriguez67% (3)
- PDFDocument99 pagesPDFBrayan GutierrezPas encore d'évaluation
- Investigacion de Calculo DiferencialDocument5 pagesInvestigacion de Calculo DiferencialOmar UrdiPas encore d'évaluation
- Mate 2 Guía 1 Unidad 1Document13 pagesMate 2 Guía 1 Unidad 1Karen Ivonne Portillo GarciaPas encore d'évaluation
- Trigo 5°Document20 pagesTrigo 5°nelsonmatosnoriegaPas encore d'évaluation
- RM 4to Sec ITDocument40 pagesRM 4to Sec ITHerberts D'CharajaPas encore d'évaluation
- Último Trabajo PothenotDocument38 pagesÚltimo Trabajo PothenotJaimeQuindeHuamánPas encore d'évaluation
- Matematicas 5º VacacionesDocument28 pagesMatematicas 5º VacacionesAdolforodriguezarran0% (1)
- Fechas de GraduacionDocument1 pageFechas de GraduacionLuis Atzompa RamirezPas encore d'évaluation
- Ficha Aritmetica IDocument88 pagesFicha Aritmetica IJulio Pacco QuispePas encore d'évaluation
- Series de FourierDocument4 pagesSeries de FourierMaria JuliaPas encore d'évaluation
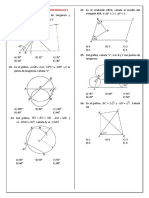
- Geometria Practica 05 San Fernando 2016Document5 pagesGeometria Practica 05 San Fernando 2016Anonymous yS70C7Pas encore d'évaluation
- Ficha 11 VII MatematicaDocument4 pagesFicha 11 VII Matematicajose ricardo chavezPas encore d'évaluation
- Trigonometria 5toDocument42 pagesTrigonometria 5toJose Villa100% (3)
- 12 Sem GeometriaDocument2 pages12 Sem GeometriaJazmin HuamanPas encore d'évaluation
- Ejercicio 1 ParcialDocument2 pagesEjercicio 1 ParcialGabriela UribioPas encore d'évaluation
- 2ºESO - Tema 2 - Fracciones y Decimales - 19-20Document2 pages2ºESO - Tema 2 - Fracciones y Decimales - 19-20Perico el de los palotesPas encore d'évaluation
- Act 3. Taller Ecuaciones e Inecuaciones 1er y 2do Grado Con 1 IncognitaDocument18 pagesAct 3. Taller Ecuaciones e Inecuaciones 1er y 2do Grado Con 1 IncognitaGreys VergaraPas encore d'évaluation
- Calculo Integral Fase 2Document19 pagesCalculo Integral Fase 2truque19Pas encore d'évaluation
- Sistema Sexagesimal Conversion y Operaciones.Document4 pagesSistema Sexagesimal Conversion y Operaciones.Euge Carol100% (2)
- Guia de TrabajoDocument3 pagesGuia de TrabajoJose Carlos BravoPas encore d'évaluation
- Limites LateralesDocument9 pagesLimites LateralesyuliPas encore d'évaluation
- Prueba de Opción Múltiple Semana 3Document10 pagesPrueba de Opción Múltiple Semana 3sailisPas encore d'évaluation
- 05 Test)Document8 pages05 Test)Rober Toledo100% (2)
- Trigonometria Sem 1Document3 pagesTrigonometria Sem 1Alexis Esmith Castañeda Requejo100% (1)
- SINBA-SIS-07-P: Promoción de La Salud EscolarDocument1 pageSINBA-SIS-07-P: Promoción de La Salud EscolarCampos Clínicos CapitalPas encore d'évaluation
- TriangulosDocument11 pagesTriangulosBalentino GarciaPas encore d'évaluation
- Esquema Tema 1Document22 pagesEsquema Tema 1Carmen Fernández CamposPas encore d'évaluation