Vous aimerez peut-être aussi
- Chapter 5 Lecture PowerPointDocument34 pagesChapter 5 Lecture PowerPointKarthik IlangoPas encore d'évaluation
- Impedance, Angular Velocities & Frequencies of Oscillating CurrentsDocument32 pagesImpedance, Angular Velocities & Frequencies of Oscillating CurrentselectrosciPas encore d'évaluation
- LCR CircuitDocument14 pagesLCR CircuitCOSM-OS50% (2)
- Bifurcation and StuffDocument9 pagesBifurcation and StuffNick BobrukovPas encore d'évaluation
- M FET O: A A A S C - D: Icrowave Scillators N Nalytic Pproach To Implify Omputer Aided EsignDocument5 pagesM FET O: A A A S C - D: Icrowave Scillators N Nalytic Pproach To Implify Omputer Aided EsignJ Jesús Villanueva GarcíaPas encore d'évaluation
- AstaInfrared SpectrosDocument14 pagesAstaInfrared SpectrosEub EuPas encore d'évaluation
- Ecx3231 Lab01 2015-2016Document6 pagesEcx3231 Lab01 2015-2016Lackith Chandimal HettiarachchiPas encore d'évaluation
- Repaso Teoria CircuitosDocument47 pagesRepaso Teoria CircuitosChristian Xavier Merchan PastorPas encore d'évaluation
- Basics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and AbidiDocument9 pagesBasics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and Abidiamr khaledPas encore d'évaluation
- Resonant Circuits and Mutual Inductances: + V R L CDocument5 pagesResonant Circuits and Mutual Inductances: + V R L CKodali JayachandraPas encore d'évaluation
- High Voltage Lecture 8Document16 pagesHigh Voltage Lecture 8Clinton OnyangoPas encore d'évaluation
- EMT 212/4: Analogue Electronic IIDocument41 pagesEMT 212/4: Analogue Electronic IIdev_mathanPas encore d'évaluation
- Efficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyDocument4 pagesEfficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyMihai PopaPas encore d'évaluation
- Lec7 FirstOrder 02 PDFDocument59 pagesLec7 FirstOrder 02 PDFPhan Phuong NgocPas encore d'évaluation
- Materi 5 RL2Document93 pagesMateri 5 RL2Christian KevinPas encore d'évaluation
- 2013 Lect 04 RCL CircuitsDocument2 pages2013 Lect 04 RCL CircuitsoxnerdkiPas encore d'évaluation
- Electromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following TopicsDocument31 pagesElectromagnetic Oscillations and Alternating Current: in This Chapter We Will Cover The Following Topicsnadir9999Pas encore d'évaluation
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11D'EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Pas encore d'évaluation
- Sinusoidal WaveformsDocument19 pagesSinusoidal WaveformsAshlee VPas encore d'évaluation
- L #1: T F R S C: Sfsu - E 301 - E L AB Ime and Requency Esponses of Eries IrcuitsDocument8 pagesL #1: T F R S C: Sfsu - E 301 - E L AB Ime and Requency Esponses of Eries IrcuitsRudra MishraPas encore d'évaluation
- Experiment # 1: Time and Frequency Responses of Series RLC CircuitsDocument6 pagesExperiment # 1: Time and Frequency Responses of Series RLC CircuitsJhonn HuamFloPas encore d'évaluation
- Chap 8 First Order CircuitsDocument11 pagesChap 8 First Order CircuitsMuhammad Bilal100% (1)
- ODE Lecture 15Document45 pagesODE Lecture 15Zainab BatoolPas encore d'évaluation
- Magnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionDocument7 pagesMagnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionAryce_Pas encore d'évaluation
- CH 4 - OscillatorDocument41 pagesCH 4 - OscillatorSathisEce100% (1)
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanPas encore d'évaluation
- Random Eletrical TextbookDocument3 pagesRandom Eletrical Textbookenoch tobePas encore d'évaluation
- DC-DC Boost Converter Control SystemDocument3 pagesDC-DC Boost Converter Control SystemYERSON DAVID ROZO GIRALDOPas encore d'évaluation
- Chapter 3 TransientDocument15 pagesChapter 3 Transientchibssa alemayehuPas encore d'évaluation
- Travelling Waves: Transients in Transmission LinesDocument56 pagesTravelling Waves: Transients in Transmission Linesjcmee100% (2)
- Multicell Convertor - ObservatoriDocument6 pagesMulticell Convertor - ObservatoriAndrei CocorPas encore d'évaluation
- Msphdsamplesq Ee2 PDFDocument5 pagesMsphdsamplesq Ee2 PDFbibiPas encore d'évaluation
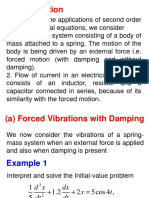
- Applications of Second-Order Differential EquationsDocument12 pagesApplications of Second-Order Differential EquationsMajid GhaffarPas encore d'évaluation
- P. C. Bressloff and S. Coombes - Desynchronization, Mode Locking, and Bursting in Strongly Coupled Integrate-and-Fire OscillatorsDocument4 pagesP. C. Bressloff and S. Coombes - Desynchronization, Mode Locking, and Bursting in Strongly Coupled Integrate-and-Fire OscillatorsNeerFamPas encore d'évaluation
- 13f Lab 12 Ac CircuitsDocument5 pages13f Lab 12 Ac Circuitsayasumire100% (1)
- R-L & R-C CircuitsDocument41 pagesR-L & R-C CircuitsAlamgir Kabir ShuvoPas encore d'évaluation
- Exp (4) - RF OscillatorsDocument12 pagesExp (4) - RF OscillatorsTony SopranoPas encore d'évaluation
- Transient AnalysisDocument54 pagesTransient AnalysisChristopher OrtegaPas encore d'évaluation
- Circuit EquitionDocument52 pagesCircuit EquitionDhany SSatPas encore d'évaluation
- Active FiltersDocument11 pagesActive FiltersmakreloadedPas encore d'évaluation
- Graetz ProblemDocument13 pagesGraetz ProblemBelialVKWWPas encore d'évaluation
- CHEN2610 Faculty CH 4Document16 pagesCHEN2610 Faculty CH 4Tahok24Pas encore d'évaluation
- Classical Theory of Rayleigh and Raman Scattering 18pDocument18 pagesClassical Theory of Rayleigh and Raman Scattering 18psatishmaanPas encore d'évaluation
- Phasor Analysis of Mechanical Systems Rev B PDFDocument6 pagesPhasor Analysis of Mechanical Systems Rev B PDFBjørn-Magnus MoslåttPas encore d'évaluation
- DPL02 ManualDocument4 pagesDPL02 Manualazurebirble12Pas encore d'évaluation
- Ee3101 Lab Report ExpDocument16 pagesEe3101 Lab Report ExpyucesPas encore d'évaluation
- Phase Shift OscillatorDocument31 pagesPhase Shift OscillatorArjob MukherjeePas encore d'évaluation
- Part One Waveguides and CavitiesDocument9 pagesPart One Waveguides and CavitiesnananghadisodikinPas encore d'évaluation
- High-Performance Crystal Oscillator Circuits: Theory and ApplicationDocument10 pagesHigh-Performance Crystal Oscillator Circuits: Theory and Applicationsaikat_hazraPas encore d'évaluation
- Transfer Function On RLC CircuitsDocument38 pagesTransfer Function On RLC CircuitsMarasigan Ryan50% (2)
- Circuit Theory - Second-Order Solution - Wiki Books, Open Books For An Open WorldDocument7 pagesCircuit Theory - Second-Order Solution - Wiki Books, Open Books For An Open WorldSuraiya HelenPas encore d'évaluation
- Sinusoidal Steady State Circuit Analysis Topic 3Document14 pagesSinusoidal Steady State Circuit Analysis Topic 3dsweetalker100% (1)
- Step Response LABDocument6 pagesStep Response LABGanesh ThapaPas encore d'évaluation
- Gonzales ResearchWorkNo.1 EST7LDocument15 pagesGonzales ResearchWorkNo.1 EST7LRainPas encore d'évaluation
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)D'EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Pas encore d'évaluation
- 2022 Rent Receipt 2Document1 page2022 Rent Receipt 2rammar147Pas encore d'évaluation
- A Coupled CFD Monte Carlo Method For Simulating Complex Aerosol Dynamics in Turbulent FlowsDocument14 pagesA Coupled CFD Monte Carlo Method For Simulating Complex Aerosol Dynamics in Turbulent Flowsrammar147Pas encore d'évaluation
- Investment Scenario - : (A) FDI EQUITY INFLOWS (Equity Capital Components)Document1 pageInvestment Scenario - : (A) FDI EQUITY INFLOWS (Equity Capital Components)rammar147Pas encore d'évaluation
- WCPT9 Scientific Program Madrid 2022Document52 pagesWCPT9 Scientific Program Madrid 2022rammar147Pas encore d'évaluation
- Case Jonah Creighton: Ethics and Value Based LeadershipDocument16 pagesCase Jonah Creighton: Ethics and Value Based Leadershiprammar147Pas encore d'évaluation
- ITC Product MixDocument47 pagesITC Product MixMohit Malviya67% (3)
- Leveraging: Case StudyDocument1 pageLeveraging: Case Studyrammar147Pas encore d'évaluation
- Dose Due To Cylindrical SourceDocument9 pagesDose Due To Cylindrical Sourcerammar147Pas encore d'évaluation
- Dose Due To Cylindrical SourceDocument9 pagesDose Due To Cylindrical Sourcerammar147Pas encore d'évaluation
- Volume 5 Issue 4 Paper 3Document6 pagesVolume 5 Issue 4 Paper 3Niku BandiPas encore d'évaluation
- Inter University Accelerator Centre New Delhi: Advertisement No. 4/2014Document1 pageInter University Accelerator Centre New Delhi: Advertisement No. 4/2014rammar147Pas encore d'évaluation
- Financing:: 1. Role of Shareholders As StakeholdersDocument2 pagesFinancing:: 1. Role of Shareholders As Stakeholdersrammar147Pas encore d'évaluation
- Shielding CalculationDocument17 pagesShielding Calculationrammar147Pas encore d'évaluation
- Mco 07Document4 pagesMco 07rammar147Pas encore d'évaluation
- Supersymmetry ReportDocument49 pagesSupersymmetry Reportrammar147Pas encore d'évaluation
- Gorelik Why Is Space Three DimensionalDocument72 pagesGorelik Why Is Space Three Dimensionalrammar147Pas encore d'évaluation
- Electronics Evaluation SchemeDocument189 pagesElectronics Evaluation Schemerammar147Pas encore d'évaluation
- MSC PHY-II-SEMDocument15 pagesMSC PHY-II-SEMrammar147Pas encore d'évaluation
- Economics For Physics IIIDocument2 pagesEconomics For Physics IIIrammar147Pas encore d'évaluation
- Unit 12 BriefDocument7 pagesUnit 12 Briefapi-477397447Pas encore d'évaluation
- SBU PlanningDocument13 pagesSBU PlanningMohammad Raihanul HasanPas encore d'évaluation
- Ultraviolet RadiationDocument3 pagesUltraviolet RadiationbirlacementPas encore d'évaluation
- Omega 900 InstructionsDocument27 pagesOmega 900 InstructionsRA Dental LaboratoryPas encore d'évaluation
- Kimberly Jimenez Resume 10Document2 pagesKimberly Jimenez Resume 10kimberlymjPas encore d'évaluation
- Po 4458 240111329Document6 pagesPo 4458 240111329omanu79Pas encore d'évaluation
- THE PERFECT DAY Compressed 1 PDFDocument218 pagesTHE PERFECT DAY Compressed 1 PDFMariaPas encore d'évaluation
- 1939 - Hammer - Terrain Corrections For Gravimeter StationsDocument11 pages1939 - Hammer - Terrain Corrections For Gravimeter Stationslinapgeo09100% (1)
- Tutorial Letter 101/0/2022: Foundations in Applied English Language Studies ENG1502 Year ModuleDocument17 pagesTutorial Letter 101/0/2022: Foundations in Applied English Language Studies ENG1502 Year ModuleFan ele100% (1)
- CIT 811 TMA 4 Quiz QuestionDocument3 pagesCIT 811 TMA 4 Quiz QuestionjohnPas encore d'évaluation
- Stamp 07 eDocument6 pagesStamp 07 eDumitru TuiPas encore d'évaluation
- Operations Management Stevenson 11th Edition Test BankDocument10 pagesOperations Management Stevenson 11th Edition Test BankAries Gonzales Caragan50% (2)
- TuberkulosisDocument285 pagesTuberkulosisTeuku M. FebriansyahPas encore d'évaluation
- A Technical Report ON Centre of Pressure ONA Plane Surface ExperimentDocument13 pagesA Technical Report ON Centre of Pressure ONA Plane Surface ExperimentVictor OwolekePas encore d'évaluation
- Grade 7 Math Lesson 22: Addition and Subtraction of Polynomials Learning GuideDocument4 pagesGrade 7 Math Lesson 22: Addition and Subtraction of Polynomials Learning GuideKez MaxPas encore d'évaluation
- Zoology LAB Scheme of Work 2023 Hsslive HSSDocument7 pagesZoology LAB Scheme of Work 2023 Hsslive HSSspookyvibee666Pas encore d'évaluation
- Menu Planning in HospitalDocument4 pagesMenu Planning in HospitalERva Soelkarnaen100% (1)
- Primefaces Users Guide 3 5cDocument497 pagesPrimefaces Users Guide 3 5calvarolucasPas encore d'évaluation
- WTSDA2021 TSDBlack Belt ManualDocument160 pagesWTSDA2021 TSDBlack Belt ManualJesus HernandezPas encore d'évaluation
- თინათინ ზურაბიშვილი, თვისებრივი მეთოდებიDocument111 pagesთინათინ ზურაბიშვილი, თვისებრივი მეთოდებიNino LomaiaPas encore d'évaluation
- Equipment Maintenance and Measuring Equipment ProcedureDocument2 pagesEquipment Maintenance and Measuring Equipment ProcedureRaja Mani100% (1)
- The Sword and The Exquisiteness PDFDocument1 437 pagesThe Sword and The Exquisiteness PDFTaruna UnitaraliPas encore d'évaluation
- Important Points in SurveyingDocument4 pagesImportant Points in SurveyingAnand BossPas encore d'évaluation
- Dr. Alberto A. Jumao-As JRDocument46 pagesDr. Alberto A. Jumao-As JRClinton Mazo100% (1)
- AnnexIIRecommendationsbyHOTCCommittee06 11 18Document6 pagesAnnexIIRecommendationsbyHOTCCommittee06 11 18Bilal AbbasPas encore d'évaluation
- IRAQ Reproductive Maternal, Newborn, Child and Adolescent HealthDocument32 pagesIRAQ Reproductive Maternal, Newborn, Child and Adolescent HealthbejarhasanPas encore d'évaluation
- To Tell The TruthDocument5 pagesTo Tell The TruthNabeel Ahmed KhanPas encore d'évaluation
- Procedure For Non Hazardous Waste ManagementDocument6 pagesProcedure For Non Hazardous Waste ManagementPaddyPas encore d'évaluation
- The Senior High School in The Phillipines: The Way To The WorldDocument5 pagesThe Senior High School in The Phillipines: The Way To The WorldRodel Ramos DaquioagPas encore d'évaluation
- GCGM PDFDocument11 pagesGCGM PDFMiguel Angel Martin100% (1)