Vous aimerez peut-être aussi
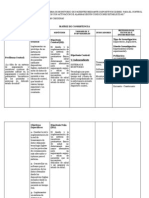
- Matriz ConsistenciaDocument3 pagesMatriz ConsistenciaChristian PizanánPas encore d'évaluation
- Proyecto de Integracion de SaberesDocument8 pagesProyecto de Integracion de SaberesALEX95121Pas encore d'évaluation
- BalumDocument4 pagesBalumChristian PizanánPas encore d'évaluation
- El RespetoDocument2 pagesEl RespetoChristian PizanánPas encore d'évaluation
- Regulacion de VoltajeDocument32 pagesRegulacion de VoltajeChristian PizanánPas encore d'évaluation
- Análisis de WeibullDocument17 pagesAnálisis de Weibulljustorfc67% (3)
- CARMIX - 5.5XL Manual Uso y MantenimientoDocument127 pagesCARMIX - 5.5XL Manual Uso y MantenimientoNestor Ruiz Torres100% (1)
- Practica Magnitudes y Conversion de UnidadesDocument2 pagesPractica Magnitudes y Conversion de UnidadesShaiel GómezPas encore d'évaluation
- Quiz - Escenario 3 - PRIMER BLOQUE-TEORICO - ELEMENTOS EN TEORIA DE COMPUTACION - (GRUPO2) PDFDocument6 pagesQuiz - Escenario 3 - PRIMER BLOQUE-TEORICO - ELEMENTOS EN TEORIA DE COMPUTACION - (GRUPO2) PDFCarlos Julian Cordero Guevara0% (2)
- Apuntes TermicaDocument165 pagesApuntes TermicaAne Goikoetxea AguinacoPas encore d'évaluation
- Descomposiciones AditivasDocument1 pageDescomposiciones AditivasDaniela Parra FonsecaPas encore d'évaluation
- Fenómenos de Transferencia de MasaDocument5 pagesFenómenos de Transferencia de MasaMillaray Paloma Isla BerriosPas encore d'évaluation
- Clase1-Corte3-Sucesiones y Series (20201)Document23 pagesClase1-Corte3-Sucesiones y Series (20201)Brayan GuerreroPas encore d'évaluation
- Examen Rápido 6Document2 pagesExamen Rápido 6Arturo GallardoPas encore d'évaluation
- 1.1.1 Mecanica ClásicaDocument80 pages1.1.1 Mecanica ClásicaPaulo Salgado AlvarezPas encore d'évaluation
- Informe 1 TopografiaDocument12 pagesInforme 1 TopografiaAntony Quispe AlvaresPas encore d'évaluation
- Reporte Bomba en Serie y Paralelo LEM IIDocument14 pagesReporte Bomba en Serie y Paralelo LEM IIMariana Alexandra Martínez MárquezPas encore d'évaluation
- Dosificar Hormigón Simple ACIDocument4 pagesDosificar Hormigón Simple ACIJhonty A. RendizPas encore d'évaluation
- Cambio Climatico y Otras EstupidecesDocument418 pagesCambio Climatico y Otras EstupidecesJose SilvaPas encore d'évaluation
- Estadistica CinthiaDocument9 pagesEstadistica CinthiaAnabel LevanoPas encore d'évaluation
- Mediciones e Instrumentacion IndustrialDocument64 pagesMediciones e Instrumentacion IndustrialJose CastañedaPas encore d'évaluation
- Excel - Fórmulas y Funciones AvanzadasDocument25 pagesExcel - Fórmulas y Funciones AvanzadasHector Rodriguez100% (1)
- Epidemiologia UnificadoDocument552 pagesEpidemiologia UnificadoNati TerraPas encore d'évaluation
- HidrolisisDocument5 pagesHidrolisis708170Pas encore d'évaluation
- Guia de Laboratorio CementosDocument14 pagesGuia de Laboratorio CementosCamila Nelida BernabePas encore d'évaluation
- Fichas Tecnicas Sistemas de Gradas PDFDocument6 pagesFichas Tecnicas Sistemas de Gradas PDFChucho CalderonPas encore d'évaluation
- Practica 1 - Lenguajes de Interfaz - Codigo GrayDocument13 pagesPractica 1 - Lenguajes de Interfaz - Codigo GrayDaniel Cipriano GarciaPas encore d'évaluation
- Metodologia de La Investigacion Educativa Bisquerra PDFDocument463 pagesMetodologia de La Investigacion Educativa Bisquerra PDFPaula Campos93% (15)
- Agua de CerveceroDocument15 pagesAgua de CerveceroMario JammaersPas encore d'évaluation
- Ejercicios de Triangulos Rectangulos 3Document4 pagesEjercicios de Triangulos Rectangulos 3daisyyayalaePas encore d'évaluation
- Algebra Relacional EstuDocument6 pagesAlgebra Relacional EstunanaPas encore d'évaluation
- TFG 669Document689 pagesTFG 669ricardote24Pas encore d'évaluation
- Trabajo Final "Generación Eléctrica Mediante Turbovapor"Document37 pagesTrabajo Final "Generación Eléctrica Mediante Turbovapor"Ing. Rodolfo David Fransó CordónPas encore d'évaluation
- Testigo de La Verdad: El Mensaje de JesúsDocument163 pagesTestigo de La Verdad: El Mensaje de JesúsdfvedvwrPas encore d'évaluation