Vous aimerez peut-être aussi
- Handwritten BookDocument120 pagesHandwritten BookBashish2711Pas encore d'évaluation
- Industries For TrainingDocument4 pagesIndustries For TrainingBashish2711Pas encore d'évaluation
- Handwritten BookDocument120 pagesHandwritten BookBashish2711Pas encore d'évaluation
- Small Antennas and Radiation ResistanceDocument9 pagesSmall Antennas and Radiation ResistanceBashish2711Pas encore d'évaluation
- Industries For TrainingDocument4 pagesIndustries For TrainingBashish2711Pas encore d'évaluation
- Shiv-Parvati - Project Report (4083896)Document2 pagesShiv-Parvati - Project Report (4083896)Bashish2711Pas encore d'évaluation
- Kandi - (7821856)Document2 pagesKandi - (7821856)Bashish2711Pas encore d'évaluation
- Vijay Kumar Bhardwaj: Career ObjectiveDocument2 pagesVijay Kumar Bhardwaj: Career ObjectiveBashish2711Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- High Integrity Aluminum (GENERAL)Document140 pagesHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- Softening N Penetration Test BitumenDocument11 pagesSoftening N Penetration Test BitumenEdwin LeonPas encore d'évaluation
- Bazele Matematice Ale Calculatoarelor - Florian Mircea BoianDocument132 pagesBazele Matematice Ale Calculatoarelor - Florian Mircea BoiannimsocPas encore d'évaluation
- Internship Report May 2016Document11 pagesInternship Report May 2016Rupini RagaviahPas encore d'évaluation
- Dynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass DcpsDocument2 pagesDynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass Dcpsd'Hell CaesarPas encore d'évaluation
- GMP Male BearingDocument3 pagesGMP Male BearingMahdi HajizadehPas encore d'évaluation
- Online Order Processing SystemDocument34 pagesOnline Order Processing SystemMuhammad ShujaPas encore d'évaluation
- Meai Mar 2010Document36 pagesMeai Mar 2010Daneshwer VermaPas encore d'évaluation
- Comparative Study of Nylon and PVC Fluidized Bed Coating On Mild SteelDocument12 pagesComparative Study of Nylon and PVC Fluidized Bed Coating On Mild SteelWaqqas ChaudhryPas encore d'évaluation
- SOP 829 - 032 Check-Reset KEMS, CrownomaticDocument2 pagesSOP 829 - 032 Check-Reset KEMS, CrownomaticAnonymous XbmoAFtIPas encore d'évaluation
- Cosben e Brochure PDFDocument28 pagesCosben e Brochure PDFsmw maintancePas encore d'évaluation
- Differences Between VSI and CSI Converter Operation Modes.Document1 pageDifferences Between VSI and CSI Converter Operation Modes.Sushil NamoijamPas encore d'évaluation
- Alloys DensityDocument4 pagesAlloys DensityArnold Melissa CollettPas encore d'évaluation
- Opc PDFDocument20 pagesOpc PDFnirajPas encore d'évaluation
- Simatic EKB Install 2012-03-08Document2 pagesSimatic EKB Install 2012-03-08Oton SilvaPas encore d'évaluation
- Intermec CS40 SpecsDocument8 pagesIntermec CS40 Specsss1222Pas encore d'évaluation
- Project AgreementDocument6 pagesProject AgreementRowin DizonPas encore d'évaluation
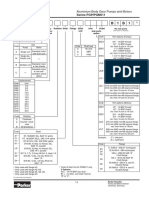
- PG 511 B 1 B 1: Ordering Code Series PGP/PGM511Document7 pagesPG 511 B 1 B 1: Ordering Code Series PGP/PGM511Four SticksPas encore d'évaluation
- Whirlpool Duet HTDocument96 pagesWhirlpool Duet HTdanny85901100% (2)
- Portland CementDocument46 pagesPortland Cementni putu diah untariningsihPas encore d'évaluation
- Manual CRM-91H 93H 9SDocument2 pagesManual CRM-91H 93H 9SFilip FilipovicPas encore d'évaluation
- Session 5 PDFDocument26 pagesSession 5 PDFToufic HagePas encore d'évaluation
- Shifting Meterials: Ground Floor ReceptionDocument3 pagesShifting Meterials: Ground Floor Receptionvishwas pandithPas encore d'évaluation
- Formulas To RememberDocument6 pagesFormulas To Rememberuygurzeren100% (3)
- Good Practices in Government Resource Planning, Developed Vs Developing CountriesDocument11 pagesGood Practices in Government Resource Planning, Developed Vs Developing CountriesFreeBalanceGRPPas encore d'évaluation
- Semantic and Frames PDFDocument20 pagesSemantic and Frames PDFsyncasterPas encore d'évaluation
- EN 1991-1-4 NA enDocument4 pagesEN 1991-1-4 NA enanuj3936100% (1)
- Manual PC Soundcard Scope 1.4.5Document17 pagesManual PC Soundcard Scope 1.4.5NatashaKillerPas encore d'évaluation
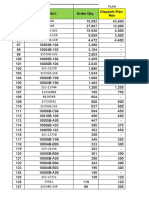
- Order Qty Vs Dispatch Plan - 04 11 20Document13 pagesOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPPas encore d'évaluation
- GIS Project Management GIS Project Management: Quality Issues Quality IssuesDocument1 pageGIS Project Management GIS Project Management: Quality Issues Quality IssuesLeo DobreciPas encore d'évaluation