Vous aimerez peut-être aussi
- Fanuc 30i SRAM BackupDocument6 pagesFanuc 30i SRAM BackupRelu ChiruPas encore d'évaluation
- Basic MCQs of Computer Science (IT) For NTS, PPSC & PCS Test, Computer Science Past Papers 2017, Computer Science Guess Papers 2017 - The Info GateDocument8 pagesBasic MCQs of Computer Science (IT) For NTS, PPSC & PCS Test, Computer Science Past Papers 2017, Computer Science Guess Papers 2017 - The Info Gateiqtadar100% (3)
- Introduction To Computer Hardware Part 1 PDFDocument31 pagesIntroduction To Computer Hardware Part 1 PDFAmrit Razz Shrestha88% (34)
- UNIT 3 - Computer MemoryDocument16 pagesUNIT 3 - Computer MemoryComputer100% (3)
- 8051 QuestionDocument9 pages8051 QuestionJai Singh MauryaPas encore d'évaluation
- K To 12 PC Hardware Servicing Learning ModuleDocument113 pagesK To 12 PC Hardware Servicing Learning ModuleMarion Alinas91% (43)
- ARM Cortex M3 RegistersDocument22 pagesARM Cortex M3 RegistersRaveendra Moodithaya100% (2)
- 737 Book NG 22 303Document76 pages737 Book NG 22 303hamdi cherif100% (1)
- PIC MicrocontrollersDocument40 pagesPIC MicrocontrollersRamaDinakaranPas encore d'évaluation
- Final 8051 PrintoutDocument78 pagesFinal 8051 PrintoutArun JyothiPas encore d'évaluation
- Microcontroller and Embedded SystemsDocument2 pagesMicrocontroller and Embedded SystemsIndranilPas encore d'évaluation
- Embedded Systems - MSC Sem III (Final)Document162 pagesEmbedded Systems - MSC Sem III (Final)nPas encore d'évaluation
- Module 5 RTOS and IDE For Embedded System DesignDocument229 pagesModule 5 RTOS and IDE For Embedded System DesignRuthvik Thumuluri0% (1)
- Embedded System Architecture SlidesDocument40 pagesEmbedded System Architecture SlidesKiran Tk100% (1)
- Smart Material Systems and MEMS: Design and Development MethodologiesD'EverandSmart Material Systems and MEMS: Design and Development MethodologiesPas encore d'évaluation
- Microcontrollers and Embedded SystemsDocument35 pagesMicrocontrollers and Embedded SystemsTarek BarhoumPas encore d'évaluation
- Introduction To Embedded SystemsDocument50 pagesIntroduction To Embedded SystemsAmbika NaikPas encore d'évaluation
- BMS Institute of Technology PDFDocument53 pagesBMS Institute of Technology PDFKaruna nidhan tiwari ECE-2016-20Pas encore d'évaluation
- MPMC Unit 4Document23 pagesMPMC Unit 4KvnsumeshChandraPas encore d'évaluation
- Interfacing ADC With 8051Document15 pagesInterfacing ADC With 8051Pavan Kumar N100% (1)
- To Microprocessors: Department of Computer Science and EngineeringDocument21 pagesTo Microprocessors: Department of Computer Science and EngineeringTanvir BadshaPas encore d'évaluation
- Module 1Document79 pagesModule 1Remya RaveendranPas encore d'évaluation
- 2 Complex Systems & Microprocessors Part I 2020Document23 pages2 Complex Systems & Microprocessors Part I 2020Rahul S.KumarPas encore d'évaluation
- 8051Document69 pages8051Raffi SkPas encore d'évaluation
- 8,16,32 Floating Point Processing in ARMDocument25 pages8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- LPC2148 RTC ProgrammingDocument10 pagesLPC2148 RTC ProgrammingRavi Rajan100% (1)
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariPas encore d'évaluation
- ARM7TDMI ProcessorDocument44 pagesARM7TDMI Processormuralik_64Pas encore d'évaluation
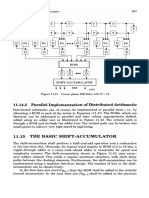
- Basic Shift AccumulatorDocument4 pagesBasic Shift AccumulatorThahsin ThahirPas encore d'évaluation
- Classification of Embedded SystemDocument2 pagesClassification of Embedded SystemrajeshPas encore d'évaluation
- 8255Document39 pages8255Mohit VermaPas encore d'évaluation
- 4 Bit Cpu ReportDocument16 pages4 Bit Cpu ReportHarshil LodhiPas encore d'évaluation
- SST89e51 Programming ManualDocument9 pagesSST89e51 Programming Manualrudra_150% (2)
- Value Added CourseDocument4 pagesValue Added CourseSuresh VaruvelPas encore d'évaluation
- Dual Core Vs Core 2 DuoDocument5 pagesDual Core Vs Core 2 DuogermainjulesPas encore d'évaluation
- ARM: An Advanced MicrocontrollerDocument54 pagesARM: An Advanced MicrocontrollershubhamPas encore d'évaluation
- Embedded System Lesson PlanDocument3 pagesEmbedded System Lesson PlanMadhusudhanan RamaiahPas encore d'évaluation
- EC8711-Embedded Lab ManualDocument108 pagesEC8711-Embedded Lab ManualparantnPas encore d'évaluation
- Answers of Microprocessor (8085) & Electronics FAQDocument21 pagesAnswers of Microprocessor (8085) & Electronics FAQsoumyadev100% (23)
- I-O PortsDocument20 pagesI-O PortsPradeep V DevPas encore d'évaluation
- Embedded Systems For Satellite Comm - Keynote SpeechDocument12 pagesEmbedded Systems For Satellite Comm - Keynote SpeechMuhammad Faisal ArainPas encore d'évaluation
- Running Machines: Arm Multiple ChoiceDocument4 pagesRunning Machines: Arm Multiple ChoicePoojaPas encore d'évaluation
- MCB2300 CanDocument14 pagesMCB2300 CanMichaelPas encore d'évaluation
- DSP - Mod 6 PPT 1Document37 pagesDSP - Mod 6 PPT 1oxygen oxygenPas encore d'évaluation
- EC6703 Embedded and Real Time SystemsDocument168 pagesEC6703 Embedded and Real Time Systemsramkumar100% (1)
- Question Bank - 150504 - Session - 19 - 20Document14 pagesQuestion Bank - 150504 - Session - 19 - 20Aashutosh TiwariPas encore d'évaluation
- ES MCQ CDACDocument53 pagesES MCQ CDACAshish Ghodke100% (2)
- 08.705 RTOS Module 2 NotesDocument30 pages08.705 RTOS Module 2 NotesAssini HussainPas encore d'évaluation
- Unit VDocument13 pagesUnit VArun kumar jaiswalPas encore d'évaluation
- 1) 8051:micro Controller (Detailed Study) - : 2) 8254/8253:peripheral Chips For Timing ControlDocument66 pages1) 8051:micro Controller (Detailed Study) - : 2) 8254/8253:peripheral Chips For Timing ControlAnn Susan100% (1)
- DAC InterfacingDocument6 pagesDAC InterfacingSumeet SainiPas encore d'évaluation
- PIC18F458PPTDocument58 pagesPIC18F458PPTdgkanade72Pas encore d'évaluation
- Unit 7 Interfacing Memory and Parallel IO PeripheralsDocument23 pagesUnit 7 Interfacing Memory and Parallel IO PeripheralsPreetham Saigal0% (1)
- Microprocessor - Overview: How Does A Microprocessor Work?Document8 pagesMicroprocessor - Overview: How Does A Microprocessor Work?vedavyas99Pas encore d'évaluation
- 8257 DMA Controller:: To Fetch The Instruction To Decode The Instruction and To Execute The InstructionDocument25 pages8257 DMA Controller:: To Fetch The Instruction To Decode The Instruction and To Execute The Instructionsatyanarayana12Pas encore d'évaluation
- Advanced Microprocessors-80286Document12 pagesAdvanced Microprocessors-80286Aaron BrooksPas encore d'évaluation
- ET7102-Microcontroller Based System DesignDocument19 pagesET7102-Microcontroller Based System DesignbalaPas encore d'évaluation
- Mupi 2 MarksDocument11 pagesMupi 2 Marksveeyesyes08Pas encore d'évaluation
- Accident Detection and Alert System Based On ARM7 MicrocontrollerDocument4 pagesAccident Detection and Alert System Based On ARM7 MicrocontrollersophiyasharanPas encore d'évaluation
- On DTHDocument23 pagesOn DTHAkash Tyagi100% (2)
- Generic Design MethodologyDocument14 pagesGeneric Design MethodologyAbdur-raheem Ashrafee BeparPas encore d'évaluation
- Instruction PipelineDocument27 pagesInstruction PipelineEswin AngelPas encore d'évaluation
- Question BankDocument35 pagesQuestion BankJohnPas encore d'évaluation
- Real Time Operating System A Complete Guide - 2020 EditionD'EverandReal Time Operating System A Complete Guide - 2020 EditionPas encore d'évaluation
- 1st SemesterDocument312 pages1st SemesterAnonymous V9E1ZJtwoEPas encore d'évaluation
- Prerequisites For Using The ROM MonitorDocument28 pagesPrerequisites For Using The ROM MonitorManuel TivanePas encore d'évaluation
- ICT223 Operating SystemsDocument60 pagesICT223 Operating SystemsXXXsevaPas encore d'évaluation
- Fandamental 1Document65 pagesFandamental 1Roopak Anand Srivastava100% (1)
- UVEditPro ManualDocument41 pagesUVEditPro ManualNina DmitrievaPas encore d'évaluation
- 57 1 Documents Neutron ManualDocument61 pages57 1 Documents Neutron ManualGrzegorz PanekPas encore d'évaluation
- 4IT1 01 MSC 20210211Document25 pages4IT1 01 MSC 20210211Anonymous RPGElSPas encore d'évaluation
- Main Memory Text of EnglishDocument2 pagesMain Memory Text of EnglishArturo RamirezPas encore d'évaluation
- Test Bank For Fundamentals of Python First Programs 1st EditionDocument7 pagesTest Bank For Fundamentals of Python First Programs 1st EditionfrederickmarcusrxbsrPas encore d'évaluation
- Rns Institute of Technology: Text BooksDocument52 pagesRns Institute of Technology: Text Booksanu radhaPas encore d'évaluation
- Communication: (Paper-Ii)Document24 pagesCommunication: (Paper-Ii)HARSHITH GOWDAPas encore d'évaluation
- TMS320F2812-Flash ProgrammingDocument22 pagesTMS320F2812-Flash ProgrammingPantech ProLabs India Pvt LtdPas encore d'évaluation
- ICT Question Book PDFDocument19 pagesICT Question Book PDFRasanjaliPas encore d'évaluation
- Canon PIXMA IP2700, IP2770, IP2780 - Service ManualDocument23 pagesCanon PIXMA IP2700, IP2770, IP2780 - Service Manualspem77Pas encore d'évaluation
- FPGA DS 02056 3 9 MachXO2 Family Data SheetDocument122 pagesFPGA DS 02056 3 9 MachXO2 Family Data Sheetthe hoangPas encore d'évaluation
- Computer Architecture I: Digital DesignDocument39 pagesComputer Architecture I: Digital DesignAli BalochPas encore d'évaluation
- Questions About MicrocontrollerDocument8 pagesQuestions About MicrocontrollernolawitPas encore d'évaluation
- Programmable Logic Device ReportDocument48 pagesProgrammable Logic Device Reportabhinavbit100% (1)
- ECZ Computer Studies P1 Past Paper 2015 2016 2017Document65 pagesECZ Computer Studies P1 Past Paper 2015 2016 2017Bricious Mulimbi100% (1)
- C Programing PDF Optimized KumailDocument52 pagesC Programing PDF Optimized KumailKnowledge RulesPas encore d'évaluation
- An 124 User Guide For FT ProgDocument43 pagesAn 124 User Guide For FT ProgBhaskar SenPas encore d'évaluation
- Chapter-1: Gas Detection Robot For Atoimic Power StationDocument67 pagesChapter-1: Gas Detection Robot For Atoimic Power Stationanoop saiPas encore d'évaluation
- (MIUI Device Team) MIUI Rom Flashing Guide For Redmi 2 - 2A - Prime (Fastboot Method) - Redmi 2 - 2A - Prime - Xiaomi MIUI Official ForumDocument21 pages(MIUI Device Team) MIUI Rom Flashing Guide For Redmi 2 - 2A - Prime (Fastboot Method) - Redmi 2 - 2A - Prime - Xiaomi MIUI Official ForumkrishanPas encore d'évaluation
- Microcontrollers - UNIT IDocument45 pagesMicrocontrollers - UNIT IyayavaramPas encore d'évaluation