Académique Documents
Professionnel Documents
Culture Documents
Motor Eléctrico
Transféré par
walterjchTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Motor Eléctrico
Transféré par
walterjchDroits d'auteur :
Formats disponibles
Motor elctrico Existen varios tipos de motores y continuar proliferando nuevos tipos de motores segn avance la tecnologa.
Pero antes de adentrarnos en la clasificacin, vamos a definir los elementos que componen a los motores. 1. La carcasa o caja que envuelve las partes elctricas del motor, es la parte externa. 2. El inductor, llamado estartor cuando se trata de motores de corriente alterna, consta de un apilado de chapas magnticas y sobre ellas est enrollado el bobinado estatrico, que es una parte fija y unida a la carcasa. 3. El inducido, llamado rotor cuando se trata de motores de corriente alterna, consta de un apilado de chapas magnticas y sobre ellas est enrollado el bobinado rotrico, que constituye la parte mvil del motor y resulta ser la salida o eje del motor. Ahora que ya sabemos diferencias las diferentes partes que componen un motor, vamos a clasificarlos: 1. Motores de corriente alterna, se usan mucho en la industria, sobretodo, el motor trifsico asncrono de jaula de ardilla. 2. Motores de corriente continua, suelen utilizarse cuando se necesita precisin en la velocidad, montacargas, locomocin, etc. 3. Motores universales. Son los que pueden funcionan con corriente alterna o continua, se usan mucho en electrodomsticos. Son los motores con colector. Pero no nos quedemos aqu, realicemos una clasificacin ms amplia: Motor de corriente alterna. Podemos clasificarlos de varias maneras, por su velocidad de giro, por el tipo de rotor y por el nmero de fases de alimentacin. Vamos a ello: 1. Por su velocidad de giro. 1. Asncronos. Un motor se considera asncrono cuando la velocidad del campo magntico generado por el estrtor supera a la velocidad de giro del rotor. 2. Sncronos. Un motor se considera sncrono cuando la velocidad del campo magntico del estrtor es igual a la velocidad de giro del rotor. Recordar que el rotor es la parte mvil del motor. Dentro de los motores sncronos, nos encontramos con una subclasificacin:
- Motores sncronos trifsicos. - Motores asncronos sincronizados. - Motores con un rotor de imn permanente. 2. Por el tipo de rotor. - Motores de anillos rozantes. - Motores con colector. - Motores de jaula de ardilla. 3. Por su nmero de fases de alimentacin. - Motores monofsicos. - Motores bifsicos. - Motores trifsicos. - Motores con arranque auxiliar bobinado. - Motores con arranque auxiliar bobinado y con condensador. Motor de corriente continua. La clasificacin de este tipo de motores se realiza en funcin de los bobinados del inductor y del inducido: - Motores de excitacin en serie. - Motores de excitacin en paralelo. - Motores de excitacin compuesta. Identificar placas. Caractersticas tcnicas. Una de las preocupaciones de los profesionales de la electricidad, es saber identificar los diferentes componentes elctricos en el taller o en la industria. En esta ocasin haremos un estudio de como identificar las caractersticas tcnicas de cualquier motor elctrico. Por ciertas normativas, tanto nacionales como internacionales, todos los motores elctricos deben tener una o dos placas identificativas, segn el caso. Vamos a utilizar para la explicacin, dos placas correspondientes a dos motores de la marca Siemens.
Vamos a ver lo que nos explica la placa representada en el grfico:
1. En primer lugar, nos est indicando que se trata de un motor trifsico alterno. Solo tenemos que fijarnos en el 3 y el smbolo de corriente alterna. 2. Cada fabricante tiene su propia nomenclatura para identificar la clase o tipo de motor. Esto solo lo podemos saber consultando los catlogos de los fabricantes o a travs de internet. En el ejemplo que nos ocupa, tenemos la nomenclatura1PH7 que mirando el catlogo de Siemens, sabemos que se trata de un motor trifsico asncrono de JAULA DE ARDILLA. 3. Tambin disponemos de un nmero de serie que nos indica la fecha de fabricacin, entre otras cosas poco relevantes para nosotros. 4. La nomenclatura IM B3 nos indica las caractersticas mecnicas correspondiente al modelo del ejemplo, nos referimos a la forma constructiva, es decir, medidas, tamaos. Cada fabricante tiene su propia nomenclatura. 5. La nomenclatura IP 55 nos indica que tipo de proteccin mecnica tiene el modelo de motor. Hay que tener en cuenta varias cosas. En primer lugar, la nomenclatura est normalizada internacionalmente, lo que quiere decir que todos los fabricantes estn sometidos a ella. En segundo lugar, tenemos que observar que la nomenclatura dispone de 2 nmeros, lo cual quiere decir que cada nmero significa una cosa diferente. Podemos decir que se trata de una nomenclatura numrica 6. La nomenclatura Th. Cl. F nos indica que clase de aislamiento tiene el motor. En el ejemplo que nos ocupa, disponemos de un motor con aislamiento de clase F. Esta nomenclatura est normalizada. Esto es respecto a las razones constructivas del motor. Ahora vamos a explicar las caractersticas elctricas del ejemplo. 1. Las tensiones: La placa nos explica que el motor puede estar alimentado con tres tensiones diferentes, pero siempre con una conexin en estrella. Este dato es importante porque nos dice que tipo de arranque est disponible en el motor. 2. Las intensidades: Nos indica las intensidades que consumir el motor en los arranques a diferentes tensiones. En este caso disponemos de tres tensiones, as que tenemos tres intensidades. El hecho que en el ejemplo sean iguales,120 A, es solo una coincidencia.
3. La potencia: nos indica las diferentes potencias que el motor es capaz de generar para las diferentes tensiones de alimentacin. 4. El factor de potencia: el factor de potenciaCos se refiere a la relacin existente entre la potencia real y la potencia aparente. Cuando mayor sea el factor de potencia, mayor ser la potencia transformada, es decir, mejor beneficio dar el motor. 5. La frecuencia: Cada frecuencia nos indica que potencia tendremos. Normalmente las frecuencias de red de los pases suele ser de 50 Hz, aunque los hay que tienen 60 Hz. En este ejemplo el fabricante nos indica que variando la frecuencia tendremos diferentes potencias. 6. Las revoluciones: Nos indica que nmero de revoluciones tiene el motor a cada tensin. 7. EN/IEC 60034-1: Es la normativa a la que est sometido el fabricante. Aqu podemos decir que IEC es igual que CEI. Identificar placas 2. En esta ocasin vamos a analizar una placa de otro motor Siemens. Como podris observar, incluso el mismo fabricante dispone de diferentes diseos de placas:
Vamos a ver lo que nos explica la placa representada en el grfico: 1. En las caractersticas mecnicas podemos ver que se trata de un motor trifsico de rotor de jaula que es lo mismo que decir de JAULA DE ARDILLA. Lo vemos en la nomenclatura que nos proporciona el fabricante: 1LA. Tambin nos indica la proteccin mecnica: IP 55; la
forma constructiva: IM B5; la norma europea: IEC/EN 60034; y finalmente, el tipo de aislamiento:Th. Cl. F. Estas son sus caractersticas mecnicas. Respecto a las caractersticas elctricas, observamos: 1. El motor puede tener dos tipos de frecuencia,50 Hz y 60 Hz. Aqu se nota que el motor ha sido diseado para diferentes pases, pues utiliza dos frecuencias. 2. Para cada frecuencia, el motor necesita unos valores de tensin diferentes, una intensidad absorvida diferente, tiene un cos distinto, y da una potencia distinta. Para la frecuencia de 50 Hz. Observamos que puede tener una conexin tanto de estrella como de tringulo. Las primeras tensiones, 220-240 V, corresponden a la conexin en tringulo; mientras que las segundas tensiones, 380-420 V, corresponden a la conexin en estrella. Con la intensidad sucede exactamente lo mismo, es decir, las primeras intensidades correspondern a la conexin en tringulo; y las segundas intensidades, correspondern a la conexin en estrella. El factor de potencia es el mismo a diferentes conexiones y tensiones Cos 0.81 Para la frecuencia de 60 Hz. Aqu tenemos que solo admite un tipo de conexin, en estrella. Pero nos indica que puede llevar dos tensiones440480 V Las intensidades absorbidas, tambin son dos la primera corresponde a la primera tensin; y la segunda, como es de esperar, corresponde a la segunda tensin. Las dos tensiones tienen en comn el factor de potencia y la potencia til del motor. El resto de datos de la placa, corresponden a normativas y nomenclatura propia del fabricante. Creo que con esto, ya nos podemos defender cuando nos topemos con un motor, lo nico que echaremos en falta, es saber que tipo de motor es en realidad, porque la placa no lo indica, es decir, estamos obligados a consultar sus catlogos.
Tablas elctricas. Aqu vamos a ver las tablas elctricas referentes a la proteccin mecnica del motor y la tabla sobre los diferentes aislamientos que puede tener un motor. Los fabricantes de motores estn obligados a incorporar esta informacin en las placas identificativas de sus motores. Tabla de proteccin. Como ya habiamos indicado en otra pgina, la nomenclatura empieza por IP seguido de dos nmeros identificativos que individualmente significan una cosa distinta. As que para esta nomenclatura disponemos de dos tablas: Primera cifra 0 : No tiene proteccin especial contra contactos. No dispone de proteccin especial contra cuerpos slidos extraos. 1 : Proteccin contra contactos de grandes superficies. Proteccin contra la penetracin de slidos extraos superiores a 12mm. 2 : Proteccin contra contactos de las manos, dedos. Proteccin contra la penetracin de slidos extraos superiores a 12mm. 3 : Proteccin contra contactos de herramientas, etc superiores a 2.5mm. Proteccin contra la penetracin de slidos extraos superiores a 2.5mm. 4 : Proteccin contra contactos de herramientas, etc superiores a 1mm. Proteccin contra la penetracin de slidos extraos superiores a 1mm. 5 : Proteccin total contra contactos. Proteccin contra depsitos de polvo. 6 : Proteccin total contra contactos. Proteccin total contra partculas de polvo. Segunda cifra 0 : Ninguna proteccin contra el agua. 1 : Proteccin contra la cada vertical de gotas de agua. 2 : Proteccin total contra la cada vertical de gotas de agua, cualquier ngulo. 3 : Proteccin contra el rociado de agua hasta un ngulo de 60 desde la vertical.
4 : Proteccin contra cadas de agua desde todas las direcciones. 5 : Proteccin contra chorros de agua desde todas las direcciones. 6 : Proteccin contra inundaciones ocasionales. 7 : Proteccin contra inmersiones ocasionales. 8 : Proteccin contra inmersiones, segn acuerdo entre cliente y fabricante. Tabla de aislamiento. Con la tabla de aislamiento, nos referimos a la temperatura mxima permitida para el devanado, independientemente de que otras partes del motor sufran una mayor temperatura. Y : 90C. A : 105C. E : 120C. B : 130C. F : 155C. H : 180C. C : ms de 180C. Tipos de arranques de motor. Hay varios tipos de arranques de motor, cada uno con sus peculiaridades y su motivo, en esta ocasin vamos a ver los ms empleados en la industria. Arranque estrella y tringulo. Las conexiones de un motor son muy sencillas de realizar, para ello el fabricante dispone en la carcasa del motor de una caja de conexiones con 6 bornes, en donde nosotros haremos las conexiones pertinentes, dependiendo de si deseamos una conexin tipo estrella o una conexin tipo tringulo. Vemoslo con unos grficos: Pero como se hacen stas conexiones en la caja de bornas? Fcil, mirar stos dos grficos:
Ahora bien, puede ser que nos interese hacer, mediante contactores, un cambio de conexin estrella-tringulo, en ese caso solo tenemos que conectar la salida de los contactores a la caja de bornes. El circuito y las conexiones, las podis estudiar en la siguiente pgina: estrella-tringulo. Este tipo de arranque se utiliza para limitar la intensidad absorbida en el momento de arranque del motor. Si disponemos de un motor de 220 V y lo conectamos, en primer lugar, en estrella, tendremos una tensin de 127 V, con la cual, obtendriamos una intensidad 2 veces la nominal. En cambio, si lo hacemos directamente, tendramos una intensidad de 5 veces la nominal. Al conectar primero en estrella y despus en tringulo, mediante un temporizador, reducimos el sufrimiento del bobinado al rebajar la intensidad de absorcin. En la actualidad existen unos equipos llamados arrancadores estrella-tringulo que realizan este
cometido de forma mucho ms exacta, pues, lo ideal es que se realice el cambio de estrella a tringulo cuando el motor halla alcanzado el 80% de su velocidad nominal. Arranque con resistencias estatricas. Este tipo de arranque se utiliza para reducir la intensidad de arranque. El funcionamiento es similar al anterior expuesto. Es decir, en una primera instancia, entran en funcionamiento las resistencias y en una segunda instancia, el motor es alimentado directamente. Para este proceso se utiliza dos contactores y un temporizador. Las particularidades ms interesantes son que las resistencias tienen un nmero limitado de arranques cada X tiempo, que debe ser sealado por el propio fabricante. La ventaja que tiene este tipo de arranque, es que no hay una cada de tensin, algo que si sucede con el arranque estrella-tringulo. Se utiliza en motores que deben accionar mquinas con un par bajo en su arranque. En la siguiente pgina tenis los dos circuitos, el de potencia y el de maniobra: arranque con resistencias estatricas. Arranque en Kusa. En este tipo de arranque se coloca una sola resistencia en una de las fases, es indiferente la fase que se elija. El valor de la resistencia debe de suministrarlo el propio fabricante del motor. Como todos los tipos de arranques que estamos viendo, tiene la finalidad de reducir la intensidad de arranque. Se utiliza en motores de pequea y mediana potencia que necesitan un reducido par de arranque. En la siguiente pgina tenis los dos circuitos, el de potencia y el de maniobra: arranque en Kusa. Arranque con autotransformador. Este tipo de arranque mejora al arranque con resistencias estatricas, al tener un mejor par y no existir prdidas por la disipacin de calor en las resistencias. Sin embargo, presenta un inconveniente, el precio, pues resulta ms econmico el arranque por resistencias estatricas. Se emplea el arranque por autotransformador en motores de gran potencia, y como siempre, con la intencin de reducir la intensidad absorbida en el momento de arranque. En la siguiente pgina tenis los dos circuitos, el de potencia y el de maniobra: arranque con autotransformador. Tipos de rotores Existen varios tipos de estos elementos, pero aqu solamente vamos a tratar los que son ms usados en la industria; es decir, los rotores para motores asncronos de corriente alterna. Rotor de jaula de ardilla simple.
En el dibujo se puede observar unos crculos negros, stos representan las ranuras del rotor donde va introducido el bobinado. Existen varios tipos de ranuras, de ah que existan varios tipos de rotores. El rotor representado es de jaula de ardilla simple. Este tipo de rotor es el usado para motores pequeos, en cuyo arranque la intensidad nominal supera 6 8 veces a la intensidad nominal del motor. Soporta mal los picos de cargas. Esta siendo sustituido por los rotores de jaula de ardilla doble en motores de potencia media. Su par de arranque no supera el 140 % del normal. Rotor de jaula de ardilla doble.
En este otro dibujo, observis que la ranura es doble, por este motivo tiene el nombre de jaula de ardilla doble. Las dos ranuras estn separadas fsicamente, aunque en el dibujo no se observe. Este tipo de rotor tiene una intensidad de arranque de 3 5 veces la intensidad nominal, y su par de arranque puede ser de 230 % la normal. stas caractersticas hacen que este tipo de rotor sea muy interesante frente al rotor de jaula de ardilla simple. Es el ms empleado en la actualidad, soporta bien las sobrecargas sin necesidad de disminuir la velocidad, lo cual le otorga mejor estabilidad. Rotor con ranura profunda.
aquellas actividades donde el control de las funcionalidades del motor se hace esencial. Constitucin del motor. Los motores de corriente continua estn formados principalmente por: 1. Estartor. El estartor lleva el bobinado inductor. Soporta la culata, que no es otra cosa que un aro acero laminado, donde estn situados los ncleos de los polos principales, aqu es donde se sita el bobinado encargado de producir el campo magntico de excitacin. 2. Rotor. Esta construido con chapas superpuestas y magnticas. Dichas chapas, tienen unas ranuras en donde se alojan los bobinados. 3. Colector. Es donde se conectan los diferentes bobinados del inducido. 4. Escobillas. Las escobillas son las que recogen la electricidad. Es la principal causa de avera en esta clase de motores, solo hay que cambiarlas con el mantenimiento habitual. 5. Truco. Este es un truco de electricista viejo, cuando el motor deja de funcionar, las entradas de tensin son las correctas, entonces nos queda este truco: quitamos la tensin, desmontamos la tapa del ventilador del motor, la tapa esta unida con tornillos a la carcasa del motor y movemos el ventilador dndole unos giros, el sentido del giro es indiferente, volvemos a tapar el ventilador y conectamos el motor, Ah! Sorpresa, funciona. Sucede que las escobillas llevan unos muelles para la friccin con los aros rozantes y puede ser que penetre suciedad en los muelles o que se queden atascados. Por supuesto, en cuanto dispongamos de tiempo se cambiarn las escobillas y los muelles. Motor de excitacin en serie.
El tipo de rotor que se ve en el dibujo es una variante del rotor de jaula de ardilla simple, pero se le denomina rotor de ranura profunda. Sus caractersticas vienen a ser iguales a la del rotor de jaula simple. Es usado para motores de baja potencia que necesitan realizan continuos arranques y paradas. Rotor de anillos rozantes. Se denominan rotores de anillos rozantes porque cada extremo del bobinado est conectado con un anillo situado en el eje del rotor. Las fases del bobinado salen al exterior por medio de unas escobillas que rozan en los anillos. Conectando unas resistencias externas a las escobillas se consigue aumentar la resistencia rotrica, de esta forma, se logra variar el par de arranque, que puede ser, dependiendo de dichas resistencias externas, del 150 % y el 250 % del par normal. La intensidad nominal no supera las 2 veces la intensidad nominal del motor. Motor elctrico C.C. Los motores de corriente continua tienen varias particularidades que los hacen muy diferentes a los de corriente alterna. Una de las particularidades principales es que pueden funcionar a la inversa, es decir, no solamente pueden ser usados para transformar la energa elctrica en energa mecnica, sino que tambin pueden funcionar como generadores de energa elctrica. Esto sucede porque tienen la misma constitucin fsica, de este modo, tenemos que un motor elctrico de corriente continua puede funcionar como un generador y como un motor. Los motores de corriente continua tienen un par de arranque alto, en comparacin con los de corriente alterna, tambin se puede controlar con mucha facilidad la velocidad. Por estos motivos, son ideales para funciones que requieran un control de velocidad. Son usados para tranvas, trenes, coches elctricos, ascensores, cadenas productivas, y todas
La conexin del devanado de excitacin se realiza en serie con el devanado del inducido, como se puede observar en el dibujo. El devanado de excitacin llevar pocas espiras y sern de una gran seccin. La
corriente de excitacin es igual a la corriente del inducido. Los motores de excitacin en serie se usan para situaciones en los que se necesita un gran par de arranque como es el caso de tranvas, trenes, etc. La velocidad es regulada con un reostato regulable en paralelo con el devanado de excitacin. La velocidad disminuye cuando aumenta la intensidad. Motor de excitacin en derivacin o shunt.
Como podemos observar, el devanado de excitacin est conectado en paralelo al devanado del inducido. Se utiliza en mquinas de gran carga, ya sea en la industria del plstico, metal, etc. Las intensidades son constantes y la regulacin de velocidad se consigue con un reostato regulable en serie con el devanado de excitacin. Motor de excitacin compuesta o compound.
El devanado es dividido en dos partes, una est conectada en serie con el inducido y la otra en paralelo, como se puede ver con el dibujo. Se utilizan en los casos de elevacin como pueden ser montacargas y ascensores. Teniendo el devanado de excitacin en serie conseguimos evitar el embalamiento del motor al ser disminuido el flujo, el comportamiento sera similar a una conexin en shunt cuando est en vacio. Con carga, el devanado en serie hace que el flujo aumente, de este modo la velocidad disminuye, no de la misma manera que si hubiesemos conectado solamente en serie. Motor de excitacin independiente.
Como podemos observar en el dibujo, los dos devanados son alimentados con fuentes diferentes. Tiene las mismas ventajas que un motor conectado en shunt, pero con ms posibilidades de regular su velocidad. Conexin de bornes. En la caja de bornes del motor disponemos de unas bornas numeradas alfabticamente, que corresponden con los diferentes conexionados que podemos hacer en el motor. Para el inducido sern la A-B. Para el devanado de excitacin en shunt o derivacin sern C-D. Para el devanado de excitacin en serie sern E-F. Para el devanado de excitacin independiente sern J-K. Para el devanado de compensacin y de conmutacin sern G-H. Motor trifsico. Dentro de los motores de corriente alterna, nos encontramos la clasificacin de los motores trifsicos, asncronos y sincronos. No hay que olvidar que los motores bifsicos y monofsicos, tambin son de corriente alterna. Los motores trifsicos tienen ciertas caractersticas comunes: En relacin con su tensin, stos motores cuando su utilidad es industrial suelen ser de 230 V y 400 V, para mquinas de pequea y mediana potencia, siendo considerados de baja tensin. No sobrepasan los 600 KW a 1500 r.p.m. Los motores de mayor tensin, de 500, 3000, 5000, 10000 y 15000 V son dedicados para grandes potencias y los consideramos como motores de alta tensin. Los motores que admiten las conexiones estrella y tringulo, son alimentados por dos tensiones diferentes, 230 V y 400 V, siendo especificado en su placa de caractersticas. Respecto a su frecuencia tenemos que decir que en
europa se utilizan los 50 Hz, mientras que en amrica se utilizan los 60 Hz. Aunque la frecuencia de red tenga fructuaciones, siempre que no superen el 1%, el motor rendir perfectamente. Mayores fructuaciones afectar directamente sobre el rendimiento de su potencia. De hecho, para variar la velocidad de esta clase de motores se manipula la frecuencia. Con respecto a la velocidad los motores trifsico son construidos para velocidades determinadas que corresponden directamente con las polaridades del bobinado y la frecuencia de la red. Respecto a la intensidad, el motor trifsico absorbe de la red la intensidad que necesita, dependiendo siempre de la fase en que se encuentre. Por sta razn existen diferentes modos de arranques, para ahorrar energa y preservar el motor. En sobrecarga pueden asumir un incremento de la intensidad de hasta 1.5 la intensidad nominal sin sufrir ningn dao durante dos minutos. Tambin se tienen que tener en cuenta las prdidas que tienen los motores trifsicos, sus causas son varias. El rendimiento de los motores de calculan en sus valores nominales, que son los indicados en las placas de caractersticas. Presentan prdidas de entrehierro, por rozamiento, por temperatura y en el circuito magntico. Los rotores de jaula de ardilla (con rotor en cortocircuito) son los ms usados por su precio y su arranque. En cambio, los motores de rotor bobinado o tambin llamados de anillos rozantes necesitan ser arrancados con resistencias rotricas, lo que incrementa su precio y su complejidad. Los motores de rotor cortocircuitado no llevan escobillas, pero si las llevan los que son de colector y de rotor bobinado. Motor trifsico asncrono. Dentro de la clasificacin de los motores trifsicos asncronos, podemos hacer otra subclasificacin, los motores asncronos de rotor en cortocircuito (rotor de jaula de ardilla y sus derivados) y los motores asncronos con rotor bobinado (anillos rozantes). Los motores asncronos generan un campo magntico giratorio y se les llaman asncronos porque la parte giratoria, el rotor, y el campo magntico provocado por la parte fija, el estartor, tienen velocidad desigual. Ha esta desigualdad de velocidad se denomina deslizamiento. El rotor est unido sobre un eje giratorio. Dicho eje, est atravesado por barras de cobre o aluminio unidas en sus extremos. El estator encapsula al rotor y genera el campo
magntico. Como hemos mencionado, es la parte fija. Provoca con su campo magntico fuerzas electromotrices en el rotor que a su vez provocan corrientes elctricas. Estas dos circunstancias, la fuerza electromotriz y las corrientes elctricas, provocan una fuerza magnetomotriz, lo cual hace que el rotor gire. La velocidad del rotor siempre ser menor que la velocidad de giro del campo magntico. As tenemos que la velocidad de un motor asncrono ser igual a la velocidad del campo magntico menos el deslizamiento del motor. La fuerza magnetomotriz que aparece en el rotor deriva en un par de fuerzas, a las que denominados par del motor, siendo las causantes del giro del rotor. El par motor depende directamente de las corrientes del rotor, y tenemos que saber que en el momento del arranque son muy elevadas, disminuyendo a medida que se aumenta la velocidad. De esta forma distinguimos dos tipos de par: el par de arranque y el par normal. Esto sucede porque al ir aumentando la velocidad del rotor se cortan menos lneas de fuerzas en el estartor y, claro est, tambin las fuerzas electromotrices del rotor disminuyen, de este modo obtenemos que las corrientes del rotor disminuyen junto con el par de motor. Lo importante de toda esta explicacin, es que con los motores asncronos podemos manejar cargas difciles porque tenemos un par de arranque elevado (hasta tres veces el par normal). Motor trifsico sncrono. Funcionan de forma muy similar a un alternador. Dentro de la familia de los motores sncronos debemos distinguir: 1. Los motores sncronos. 2. Los motores asncronos sincronizados. 3. Los motores de imn permanente. Los motores sncronos son llamados as, porque la velocidad del rotor y la velocidad del campo magntico del estartor son iguales. Los motores sncronos se usan en mquinas grandes que tienen una carga variable y necesitan una velocidad constante. Arranque de un motor trifsico sncrono. Existen cuatro tipos de arranques diferentes para este tipo de motor: 1. Como un motor asncrono. 2. Como un motor asncrono, pero sincronizado. 3. Utilizando un motor secundario o auxiliar para el arranque. 4. Como un motor asncrono, usando un tipo de arrollamiento diferente: llevar unos anillos
rozantes que conectarn la rueda polar del motor con el arrancador. Frenado de un motor trifsico sncrono. Por regla general, la velocidad deseada de este tipo de motor se realiza por medio de un reostato. El motor sncrono cuando alcance el par crtico se detendr, no siendo esta la forma ms ortodoxa de hacerlo. El par crtico se alcanza cuando la carga asignada al motor supera al par del motor. Como comento, no es la forma apropiada para detener el motor, se estropea si abusamos de ello, porque se recalienta. La mejor forma de hacerlo, es ir variando la carga hasta que la intensidad absorvida de la red sea la menor posible, entonces desconectaremos el motor. Otra forma de hacerlo, y la ms habitual, es regulando el reostato, con ello variamos la intensidad y podemos desconectar el motor sin ningn riesgo. Motor monofsico. Este tipo de motor es muy utilizado en electrodomsticos porque pueden funcionar con redes monofsicas algo que ocurre con nuestras viviendas. En los motores monofsicos no resulta sencillo iniciar el campo giratorio, por lo cual, se tiene que usar algn elemento auxiliar. Dependiendo del mtodo empleado en el arranque, podemos distinguir dos grandes grupos de motores monofsicos: Motor monofsico de induccin. Su funcionamiento es el mismo que el de los motores asncronos de induccin. Dentro de este primer grupo disponemos de los siguientes motores: 1. De polos auxiliares o tambin llamados de fase partida. 2. Con condensador. 3. Con espira en cortocircuito o tambin llamados de polos partidos. Motor monofsico de colector. Son similares a los motores de corriente continua respecto a su funcionamiento. Existen dos clases de estos motores: 1. Universales. 2. De repulsin. Motor monofsico de fase partida. Este tipo de motor tiene dos devanados bien diferenciados, un devanado principal y otro devanado auxiliar. El devanado auxiliar es el que provoca el arranque del motor, gracias a que desfasa un flujo magntico respecto al flujo del devanado principal, de esta manera, logra tener dos fases en el momento del arranque.
Al tener el devanado auxiliar la corriente desfasada respecto a la corriente principal, se genera un campo magntico que facilita el giro del rotor. Cuando la velocidad del giro del rotor acelera el par de motor aumenta. Cuando dicha velocidad est prxima al sincronismo, se logran alcanzar un par de motor tan elevado como en un motor trifsico, o casi. Cuando la velocidad alcanza un 75 % de sincronismo, el devanado auxiliar se desconecta gracias a un interruptor centrfugo que llevan incorporados estos motores de serie, lo cual hace que el motor solo funcione con el devanado principal. Este tipo de motor dispone de un rotor de jaula de ardilla como los utilizados en los motores trifsicos. El par de motor de stos motores oscila entre 1500 y 3000 r.p.m., dependiendo si el motor es de 2 4 polos, teniendo unas tensiones de 125 y 220 V. La velocidad es prcticamente constante. Para invertir el giro del motor se intercambian los cables de uno solo de los devanados (principal o auxiliar), algo que se puede realizar facilmente en la caja de conexiones o bornes que viene de serie con el motor. Motores monofsicos 2. Motor monofsico de condensador. Son tecnicamente mejores que los motores de fase partida. Tambin disponen de dos devanados, uno auxiliar y otro principal. Sobre el devanado auxiliar se coloca un condensador en serie, que tiene como funcin el de aumentar el par de arranque, entre 2 y 4 veces el par normal. Como se sabe, el condensador desfasa la fase afectada en 90, lo cual quiere decir, que el campo magntico generado por el devanado auxiliar se adelanta 90 respecto al campo magntico generado por el devanado principal. Gracias a esto, el factor de potencia en el momento del arranque, est proximo al 100%, pues la reactancia capacitiva del condensador (XC) anula la reactancia inductiva del bobinado (xL). Por lo dems, se consideran igual que los motores de fase partida, en cuanto a cambio de giro, etc. Lo nico importante que debemos saber, es que con un condensador en serie se mejora el arranque. Motor monofsico con espira en cortocircuito. Dentro del grupo que habiamos realizado en otra pgina, el motor monofsico con espira en cortocircuito es el ltimo que vamos a tratar. Son tambin llamados motores monofsicos de polos partidos. Este tipo de motor no lleva devanado auxiliar, en su lugar se coloca una espira (vamos a llamarle minibobina) alrededor de una de las masas polares, al menos, en un tercio de la masa. Qu entendemos por masa polar? La masa polar es el conjunto de espiras de un polo. Imaginar por un momento una pelota pequea a la cual le sobresalen
dos cables, pues bien, la minibobina est enrollada en la pelota sin tocar los cables, la masa polar sera el cuerpo de la pelota, y la pelota con los cables vendra a ser el polo. Con lo expuesto anteriormente, se consigue que al alimentar el motor en las espiras que se encuentran en cortocircuito se genere un flujo diferente respecto a las dems espiras que no estn en cortocircuito. La diferencia no llega a alcanzar los 90, pero es suficiente para lograr arrancar el motor. La velocidad depender del nmero de polos que tenga el motor. El par de arranque es muy inferior respecto a un motor de fase partida, alrededor del 60%. Si queremos cambiar el sentido del giro, debemos desmontar el motor e invertir el eje. Se fabrican para bajas potencias, de 1 a 20 Cv. Se utiliza poco este tipo de motor. Motor universal. El motor universal es un tipo de motor que puede ser alimentado con corriente alterna o con corriente continua, es indistinto. Sus caractersticas principales no varan significativamente, sean alimentados de una forma u otra. Por regla general, se utilizan con corriente alterna. Tambin los encontraris con el sobrenombre de motor monofsico en serie. Este tipo de motor se puede encontrar tanto para una mquina de afeitar como para una locomotora, esto da una idea del margen de potencia en que pueden llegar a ser construidos. Las partes principales de este motor son: 1. Estartor. 2. Rotor con colector. Los bobinados del estartor y del rotor estn conectados en serie a travs de unas escobillas. El par de arranque se sita en 2 3 veces el par normal. La velocidad cambia segn la carga. Cuando aumenta el par motor disminuye la velocidad. Se suelen construir para velocidades de 3000 a 8000 r.p.m., aunque los podemos encontrar para 12000 r.p.m. Para poder variar la velocidad necesitamos variar la tensin de alimentacin, normalmente se hace con un reostato o resistencia variable. El cambio de giro es controlable, solo tenemos que intercambiar una fase en el estartor o en el rotor, nunca en los dos, lo cual es facilmente realizable en la caja de conexiones o bornes que viene incorporado con el motor. Cuando el motor es alimentado, se produce que las corrientes circulan en el mismo sentido, tanto el estartor como en el rotor, pero en el cambio de ciclo cambia el sentido en los dos, provocando el arranque del motor.
Motor trifsico como monofsico. En los motores de jaula de ardilla simple, se puede cablear un circuito denominado Steinmetz. En dicho circuito se alimenta el motor con dos fases, y entre una de las fases y la fase que queda libre, se coloca un condensador. De esta manera, se logra desfasar en 90 la fase compartida, de otra forma no se producira el par de arranque necesario para hacer funcionar el motor. El funcionamiento es idntico a un arranque en estrella, puesto que las dos fases estaran en serie actuando como un devanado principal, y la tercera fase, estara adelantada 90. Esta tcnica, solamente es til usarla para motores de jaula de ardilla simple de baja potencia, que tengamos abandonados y queramos usarlos por alguna causa momentnea. Hay que tener en cuenta, que el motor pierde un 25% de su potencia, vamos que solo es til para casos muy especiales. El par de arranque se ve reducido entre el 40 y el 50% del par nominal. La capacidad del condensador sera de 70f para 230 V y 50 Hz, esta medida tenemos que multiplicarla por cada Kw de potencia del motor. Es decir, si el motor es de 10 Kw de potencia, sera 70 * 10 = 700 f. Para una tensin de red de 400 V y 50 Hz; sern 20 f por cada Kw de potencia. Para quien quiera calcular el valor del condensador, aqu dejo la frmula necesaria:
Donde: Vl : es la tensin de lnea. P : es la potencia del motor en Cv. f : es la frecuencia de la red. El sentido de giro se puede cambiar, intercambiando una de las fases con la fase que tiene el condensador. Motor paso a paso. Este tipo de motor de motor es empleado cuando se hace imprescindible controlar exactamente las revoluciones o las partes de vueltas. Son utilizados, principalmente, en mquinas pequeas de oficina, como pueden ser impresoras, fotocopiadoras, faxes, etc. Tambin se pueden encontrar en instrumentos mdicos y cientficos. Hay tres tipos de stos motores, a saber:
1. De excitacin unipolar. 2. De excitacin bipolar. 3. Hbridos. La posicin en que se encuentran instalados resulta vital para su correcto funcionamiento, pues la gracia que tienen estos motores es precisamente el absoluto control del movimiento. Las partes que integran este tipo de motor son: 1. Un estartor, que tiene integrado una serie de bobinas alimentadas por impulsos de c.c. 2. El rotor, tiene uno o ms imanes permanentes. Variador de velocidad. Cuando estamos hablando de variador, lo primero que tenemos que distinguir es la tecnologa a la estamos aplicando el trmino. Esto es as, porque disponemos de variadores mecnicos, hidrulicos y electrnicos ( o elctricos). Cada tecnologa dispone de un trmino para definir la variacin de velocidad. Como esta es una WEB de electricidad, nos limitaremos a tratar los variadores de velocidad para motores elctricos, ya sean de corriente continua o alterna. Los variadores de velocidad se utilizan principalmente para controlar la velocidad del motor elctrico, sobretodo su frenado, y para ahorrar energa, lo que repercute positivamente en una mayor duracin del motor. No quiero pasar por alto un detalle bastante importante, el frenado del motor se puede conseguir sin la ayuda de un variador si utilizamos algn sistema circuito elctrico adicional al mismo. No se suelen usar, porque es ms fcil y mejor usar los variadores, pero aqu os dejo algunas muestras de como frenar un motor elctrico: Frenado por electroimn Frenado por contracorriente Asimismo, tenemos que aadir, que dependiendo de qu tipo de motor se trate, usaremos un sistema u otro. Nos referimos al uso de un circuito de frenado o al uso de un variador. Existen dos clases de variadores elctricos principales: 1. Variadores de velocidad para motores de corriente continua. 2. Variadores de frecuencia, para motores de corriente alterna. Tambin hay otras dos formas de controlar la
velocidad de los motores, pero que no van a ser tratadas en esta web porque apenas son usadas:variadores Eddy y variadores por deslizamiento. Variador de velocidad para motores CC. Estos tipos de motor llevan incorporado un dispositivo electrnico de arranque para regular y controlar el motor. As que no es preciso comprar un variador adicional porque ya lo lleva incorporado de serie. La velocidad que tiene est relacionada proporcionalmente con la tensin del inducido, lo cual nos indica cmo se puede manipular la velocidad, variando la tensin de entrada o su intensidad. Como la tensin y la velocidad estn relacionadas, la potencia tambin lo est, con lo cual queremos decir que la potencia es directamente proporcional a la tensin y a la velocidad. Como ya hemos apuntado, existen dos formas de manipular la velocidad en un motor de corriente continua: 1. Por la tensin. 2. Por la intensidad. Si lo realizamos a travs de la tensin, estaremos variando la tensin de entrada al devanado inducido. Esto se puede realizar de diversas formas: 1. Por control reosttico. 2. Usando un sistema denominado Ward-Leonard. 3. Utilizando un elevador reductor. 4. Con un variador electrnico. Es el ms empleado por su facilidad de uso y de programacin.
Por el contrario, si decidimos manipular la velocidad de un motor por su intensidad, tendremos que variar el flujo inductor. Esto se realiza de dos maneras: 1. Con un reostato para regular el flujo en el campo. 2. Con un control electrnico. Variador de frecuencia. Los variadores de frecuencia se utilizan en motores trifsicos asncronos con rotor en cortocircuito. Dicha variacin de frecuencia se realiza mediante un aparato electrnico que tiene dos fases de funcionamiento: 1. Rectificacin. 2. Conversin.
En la primera fase, el aparato electrnico rectifica la tensin alterna convirtindola en tensin continua. En la segunda fase, se vuelve a convertir la tensin continua en tensin alterna, pero con la posibilidad de poder modificar tanto la tensin como la frecuencia. Esta etapa la realiza un componente electrnico denominado ondulador. Para poder controlar la velocidad de este tipo de motor, necesitamos mantener la relacin existente entre la tensin y la frecuencia de forma constante, de sta forma se consigue un par constante y su regulacin. Otras formas de frenado para este tipo de motor son: 1. Por contracorriente. 2. Por electroimn. 3. Por corriente continua. Pero, como ya se ha mencionado en alguna parte de sta web, se prefiere utilizar el variador de frecuencia para frenar un motor. Hay que tener en cuenta, que los variadores de frecuencia, son dispositivos electrnicos fciles de programar, baratos de mantener y, adems, disponen de elementos de proteccin y seguridad para el motor. Velocidad en motores asncronos de rotor bobinado. Este tipo de motor, para su fase de arranque necesita de un conjunto de resistencia conectadas en el bobinado rotrico, por este motivo, se les llama resistencias rotricas. Pues bien, la velocidad del motor se gradua a travs de stas resistencias. Cambiando su valor hmico, modificamos la velocidad del motor.
Vous aimerez peut-être aussi
- Indice de PolarizacionDocument67 pagesIndice de PolarizacionRonald Victor Galarza HermitañoPas encore d'évaluation
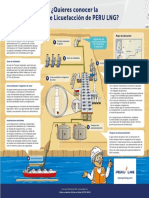
- Planta de Licuefaccion Peru-Lng-1Document1 pagePlanta de Licuefaccion Peru-Lng-1julio2cesar2calder-1Pas encore d'évaluation
- Norma Peruana Instalaciones Electricas-2006Document285 pagesNorma Peruana Instalaciones Electricas-2006EdwinEscobedoCoaguila87% (23)
- RM-137-2009 Mem-DmDocument2 pagesRM-137-2009 Mem-DmHarlyn Requejo RodasPas encore d'évaluation
- Osinergmin No.206 2013 Os CD TarifasDocument42 pagesOsinergmin No.206 2013 Os CD Tarifasppuchiha100% (1)
- 1era. Modificación BM NTCSE #083-2003-OS-CD PDFDocument22 pages1era. Modificación BM NTCSE #083-2003-OS-CD PDFwalterjchPas encore d'évaluation
- Informe Final 1Document20 pagesInforme Final 1Yael BalvinPas encore d'évaluation
- Proteccion Ambiental de Actividades Electric AsDocument17 pagesProteccion Ambiental de Actividades Electric AsAnonymous DQqy1dHXBPas encore d'évaluation
- Motor EléctricoDocument12 pagesMotor EléctricowalterjchPas encore d'évaluation
- Planificación Por Bloques 1ro. Bachillerato (FISICA)Document11 pagesPlanificación Por Bloques 1ro. Bachillerato (FISICA)Danilo Yépez Rivera100% (2)
- Manuales Electricos Compresores CoperlandwwwforofriocomDocument10 pagesManuales Electricos Compresores CoperlandwwwforofriocomrobertPas encore d'évaluation
- Presentacion Turbinas de GasDocument111 pagesPresentacion Turbinas de GasAlejandro Gutierrez Romero100% (1)
- Sesión 13 - Juan Orlando CossioDocument74 pagesSesión 13 - Juan Orlando Cossiofernando CarrilloPas encore d'évaluation
- Descripcion Espanol Quantum Healing TM y Alineacion Energetica CuanticaDocument8 pagesDescripcion Espanol Quantum Healing TM y Alineacion Energetica CuanticaMarbell NayNicté100% (1)
- Guía 1 CienciasDocument4 pagesGuía 1 CienciasDANIELA LÓPEZ VILLALOBOSPas encore d'évaluation
- Mateo PJDocument197 pagesMateo PJEduardo GuerrerosPas encore d'évaluation
- Tarea 12Document7 pagesTarea 12Karina Michel Rodriguez RodriguezPas encore d'évaluation
- Medidas Fluorescentes Philips T5Document2 pagesMedidas Fluorescentes Philips T5Bar1492Pas encore d'évaluation
- Datos de La Factura de ElectricidadDocument4 pagesDatos de La Factura de ElectricidadMelissa JatamilloPas encore d'évaluation
- Termodinamica - Cengel 7th - Copia - 1183Document1 pageTermodinamica - Cengel 7th - Copia - 1183Carl Conter Onder50% (6)
- Unidad 2 Instalaciones Electromagnéticas y de AcondicionamientoDocument5 pagesUnidad 2 Instalaciones Electromagnéticas y de AcondicionamientoFaride HernándezPas encore d'évaluation
- Estabilizadores y UPSDocument21 pagesEstabilizadores y UPSJOrdan Gala TaipePas encore d'évaluation
- Cálculo energético de paciente 21 añosDocument3 pagesCálculo energético de paciente 21 añosJeremy ArmijosPas encore d'évaluation
- Acumuladores ElectroquimicosDocument3 pagesAcumuladores ElectroquimicosDany AbadPas encore d'évaluation
- Curso EUREM InformacionDocument2 pagesCurso EUREM InformacionPablo Puertas HernandoPas encore d'évaluation
- Aviso de Cobranza Por Consumo de Energía Eléctrica GD Convertido 1Document4 pagesAviso de Cobranza Por Consumo de Energía Eléctrica GD Convertido 1Alejandra SejasPas encore d'évaluation
- ISEK - Nyce Colombia 21E5-0787-02 - Tableros y Armarios de MedidoresDocument8 pagesISEK - Nyce Colombia 21E5-0787-02 - Tableros y Armarios de MedidoresJosé Leonardo Guerrero CortésPas encore d'évaluation
- Curva de Capabilidad, G. SincronoDocument5 pagesCurva de Capabilidad, G. SincronoGerardo Roman Roman100% (1)
- OrigenEnergiaSeresVivosNaturalezaDocument1 pageOrigenEnergiaSeresVivosNaturalezaVictoria SalgadoPas encore d'évaluation
- Conceptos Basicos de ElectricidadDocument88 pagesConceptos Basicos de ElectricidadMagali GonzalesPas encore d'évaluation
- Generadores eléctricos - Revista ConstruirDocument12 pagesGeneradores eléctricos - Revista ConstruiroespanaPas encore d'évaluation
- Electricidad Sistema Nacional Interconectado Del EcuadorDocument6 pagesElectricidad Sistema Nacional Interconectado Del EcuadorThEzequielPas encore d'évaluation
- Formatos CorregidosDocument6 pagesFormatos CorregidosJulio Larico RamosPas encore d'évaluation
- Potencia en Motores A.CDocument12 pagesPotencia en Motores A.CEdisonWillisPas encore d'évaluation
- Taller-Acustica 11°Document26 pagesTaller-Acustica 11°yapo eraiPas encore d'évaluation
- Análisis Ciclo Vida Tubos PVCDocument11 pagesAnálisis Ciclo Vida Tubos PVCjorgePas encore d'évaluation
- PDDDDocument24 pagesPDDDSantiago Quintero ArangoPas encore d'évaluation
- Reporte Practica 8Document3 pagesReporte Practica 8Luis Angel UgartePas encore d'évaluation
- Curso Calderas V 4.0-12Document104 pagesCurso Calderas V 4.0-12abiihh95Pas encore d'évaluation