Vous aimerez peut-être aussi
- Analise Sistema TransportesDocument238 pagesAnalise Sistema TransportesSérgio RigelPas encore d'évaluation
- SoldagemDocument1 pageSoldagemSérgio RigelPas encore d'évaluation
- Princípios de Engenharia Naval - Sistemas FlutuantesDocument9 pagesPrincípios de Engenharia Naval - Sistemas FlutuantesSérgio RigelPas encore d'évaluation
- Exercicios Modelagem - Hidrostatica e Estabilidade 2017Document154 pagesExercicios Modelagem - Hidrostatica e Estabilidade 2017Marcos RodrigoPas encore d'évaluation
- Manutenção preventiva de embarcações para empresa de navegaçãoDocument20 pagesManutenção preventiva de embarcações para empresa de navegaçãotoshugo80% (5)
- Prevenção e Controle de Riscos em Máquinas e Equipamentos IIIDocument28 pagesPrevenção e Controle de Riscos em Máquinas e Equipamentos IIISérgio RigelPas encore d'évaluation
- Resolução atividades complementares físicaDocument27 pagesResolução atividades complementares físicaSérgio RigelPas encore d'évaluation
- Dissertação - Fernando Antônio de AmorimDocument222 pagesDissertação - Fernando Antônio de AmorimSérgio RigelPas encore d'évaluation
- Rotina EPI LavanderiaDocument2 pagesRotina EPI LavanderiaSérgio RigelPas encore d'évaluation
- Sistema de gestão da segurança do trabalho na Votorantim MetaisDocument57 pagesSistema de gestão da segurança do trabalho na Votorantim MetaisFernandes SalesPas encore d'évaluation
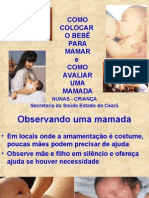
- Como colocar bebê para mamarDocument34 pagesComo colocar bebê para mamarSérgio RigelPas encore d'évaluation
- NBR 12693 - Sistemas de Protecao Por Extintores de IncendioDocument15 pagesNBR 12693 - Sistemas de Protecao Por Extintores de IncendioRomulo Fachina100% (2)
- Ordem de Serviço - Programa de Prevenção de Combate À Incêndio e PânicoDocument2 pagesOrdem de Serviço - Programa de Prevenção de Combate À Incêndio e PânicoSérgio RigelPas encore d'évaluation
- Determinação dos parâmetros de vibração de uma viga biapoiada com desbalanceamento rotativoDocument16 pagesDeterminação dos parâmetros de vibração de uma viga biapoiada com desbalanceamento rotativoSérgio RigelPas encore d'évaluation
- Artigo Sobena FinalDocument12 pagesArtigo Sobena FinalSérgio RigelPas encore d'évaluation
- Termodinâmica Aplicada: Exercícios de Vapor e GásDocument2 pagesTermodinâmica Aplicada: Exercícios de Vapor e GásEdgard AraujoPas encore d'évaluation
- ESOQ Livro 02Document83 pagesESOQ Livro 02MaiconPas encore d'évaluation
- Lista de Exercícios Ciclo DieselDocument2 pagesLista de Exercícios Ciclo DieselengmecpaulohenriquePas encore d'évaluation
- Instrucoes Montagem e Manutençao IAME X30 SHIFTERDocument6 pagesInstrucoes Montagem e Manutençao IAME X30 SHIFTERrdc02271Pas encore d'évaluation
- Caterpillar 3116 - Carlos InformaçoesDocument3 pagesCaterpillar 3116 - Carlos InformaçoesCarlos Barbosa67% (3)
- Catálogo CB RP15302Document72 pagesCatálogo CB RP15302Leopoldo WillePas encore d'évaluation
- Bomba Rochfer1Document26 pagesBomba Rochfer1ricm152Pas encore d'évaluation
- Manual SP25HDocument33 pagesManual SP25HEwerton BianchiPas encore d'évaluation
- Avaliação de Termodinâmica Aplicada IDocument4 pagesAvaliação de Termodinâmica Aplicada ILincoln RibeiroPas encore d'évaluation
- Manual de Serviço Nissan td42Document7 pagesManual de Serviço Nissan td42ScribdTranslationsPas encore d'évaluation
- Eq 7881 Rampa Pneumatica para Alinhamento PDFDocument19 pagesEq 7881 Rampa Pneumatica para Alinhamento PDFt8823pcPas encore d'évaluation
- Compressão e Frio IndustrialDocument35 pagesCompressão e Frio IndustrialNuno FormigaPas encore d'évaluation
- Análise energética de compressores alternativosDocument20 pagesAnálise energética de compressores alternativosDurao SebastiaoPas encore d'évaluation
- Motor KIA 3.0Document4 pagesMotor KIA 3.0Carlos Barbosa100% (3)
- Bifrm 0022 PoDocument12 pagesBifrm 0022 PoTablet CasaPas encore d'évaluation
- T96332 Manual de Manutenção ImportanteDocument39 pagesT96332 Manual de Manutenção ImportanteJosé Roberto JúniorPas encore d'évaluation
- Yamaha Ybr 125 e (18DM Brasil) (2013 01) Catálogo de PeçasDocument72 pagesYamaha Ybr 125 e (18DM Brasil) (2013 01) Catálogo de PeçasPaulo PedottPas encore d'évaluation
- A1 - Lab - Hid - Pneu - MEC0901N-Grupo CDocument22 pagesA1 - Lab - Hid - Pneu - MEC0901N-Grupo CPaulo VitorPas encore d'évaluation
- Manual DNXDocument12 pagesManual DNXerivan bernardoPas encore d'évaluation
- Tabela de Medida Motor Man D 08Document9 pagesTabela de Medida Motor Man D 08João Nunnes67% (6)
- Simulados de Motores AeronáuticosDocument21 pagesSimulados de Motores AeronáuticosVictor AugustoPas encore d'évaluation
- Peças do bloco do motor e tampa do cárter AGRALE 4230Document130 pagesPeças do bloco do motor e tampa do cárter AGRALE 4230ALEXANDRE F VOLTA100% (2)
- Catalogo de Peças Vista Explodido Motor Mitsubishi - Rocadeira L26MDocument14 pagesCatalogo de Peças Vista Explodido Motor Mitsubishi - Rocadeira L26MFabiano_P100% (2)
- Manjate, Filipe Jose LABDocument21 pagesManjate, Filipe Jose LABCharass1 MassangaiePas encore d'évaluation
- 05 - Motor EA888 3 GeraçãoDocument62 pages05 - Motor EA888 3 GeraçãoPatrick Dos Santos Rodrigues Miranda100% (1)
- Termodinâmica Aula Trabalho 1Document22 pagesTermodinâmica Aula Trabalho 1Thiago MamonaPas encore d'évaluation
- Componentes sonda perfuraçãoDocument99 pagesComponentes sonda perfuraçãoLUIS NELIO DE JESUS JUNIORPas encore d'évaluation
- Componentes do motor e configurações multicilíndricasDocument19 pagesComponentes do motor e configurações multicilíndricasthallesnetPas encore d'évaluation
- Sistemas de sondaDocument42 pagesSistemas de sondaGregorio MoragaPas encore d'évaluation
- Dimensionamento de cilindro hidráulico para cimbre autolançávelDocument98 pagesDimensionamento de cilindro hidráulico para cimbre autolançávelAlexsandro Cavalcanti de SouzaPas encore d'évaluation