Vous aimerez peut-être aussi
- 4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor TestsDocument4 pages4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor Testsmandadi_sailesh50% (2)
- Sreekavithaengineerig College: Scott Connection of TransformersDocument4 pagesSreekavithaengineerig College: Scott Connection of Transformersmandadi_saileshPas encore d'évaluation
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701150% (4)
- Brake Test On 3 Phase Slip Ring Induction MotorDocument5 pagesBrake Test On 3 Phase Slip Ring Induction MotorRajeev Sai0% (1)
- Exp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.Document10 pagesExp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.AbhishEk Singh67% (3)
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249Pas encore d'évaluation
- EEP305 Electric Drives Laboratory PDFDocument14 pagesEEP305 Electric Drives Laboratory PDFAmit Singh100% (1)
- Synchronous Generators - 2 Marks Questions and AnswersDocument3 pagesSynchronous Generators - 2 Marks Questions and AnswersJoseph Harindranath67% (3)
- Electrical Machines1 PDFDocument178 pagesElectrical Machines1 PDFnivashini a0% (1)
- 10eel58 Transformers and Induction Machines LaboratoryDocument32 pages10eel58 Transformers and Induction Machines Laboratorysvinod s100% (2)
- Drives and Control Lab ManualDocument36 pagesDrives and Control Lab ManualKabilanPas encore d'évaluation
- Questions 1Document11 pagesQuestions 1anvithaPas encore d'évaluation
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocument4 pages2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- 6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEDocument3 pages6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEaissmsPas encore d'évaluation
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANPas encore d'évaluation
- Capacitor Start/Run Induction Motor: ExperimentDocument9 pagesCapacitor Start/Run Induction Motor: ExperimentMarcos Roberto ReinertPas encore d'évaluation
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocument3 pagesSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Exp11.Three Phase Full Wave Controlled ConvertersDocument4 pagesExp11.Three Phase Full Wave Controlled ConvertersJawad Rasheed SheikhPas encore d'évaluation
- 1.o.c & S.C T Test On Single Phase TransformerDocument6 pages1.o.c & S.C T Test On Single Phase Transformermandadi_saileshPas encore d'évaluation
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Speed Control of DC Shunt MotorDocument7 pagesSpeed Control of DC Shunt MotorAakash0% (1)
- Slip Test On Salient Pole MachineDocument3 pagesSlip Test On Salient Pole Machinedeepak reddyPas encore d'évaluation
- Review Questions For Electrical Machines and DrivesDocument14 pagesReview Questions For Electrical Machines and DrivesClifford MkongPas encore d'évaluation
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- 2002 Lecture - 5-7Document21 pages2002 Lecture - 5-7acc gemPas encore d'évaluation
- Design & Fabrication of 1-Ph Induction Motor Starter MANUALDocument5 pagesDesign & Fabrication of 1-Ph Induction Motor Starter MANUALSreenidhi SrungaramPas encore d'évaluation
- Injection of EMF in The Rotor CircuitDocument3 pagesInjection of EMF in The Rotor CircuitAbhishekGuptaPas encore d'évaluation
- Basic SVPWMDocument6 pagesBasic SVPWMVAMSIKRISHNAEEEPas encore d'évaluation
- Full-Wave Bridge RectifierDocument26 pagesFull-Wave Bridge RectifierSmallhorse1984Pas encore d'évaluation
- Experiment.3. Load Characteristics of D.C Shunt GeneratorDocument2 pagesExperiment.3. Load Characteristics of D.C Shunt Generatorمحمد الحدي100% (1)
- Lecture1 Singly Excited SystemDocument79 pagesLecture1 Singly Excited SystemMuhammad Umar Ijaz86% (7)
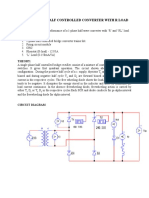
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARPas encore d'évaluation
- V and Inverted V Curves of Synchronous MotorDocument5 pagesV and Inverted V Curves of Synchronous MotorPradyumna Pooskuru100% (1)
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmePas encore d'évaluation
- BrakingDocument19 pagesBrakingMohammad Umar RehmanPas encore d'évaluation
- UNIT-V-Synchronous MachinesDocument51 pagesUNIT-V-Synchronous Machinessujith100% (1)
- Unit 3Document5 pagesUnit 3Narasimman DonPas encore d'évaluation
- Double Revolving Field TheoryDocument2 pagesDouble Revolving Field TheoryNaresh Gollapalli100% (1)
- Machines Lab II QuestionsDocument4 pagesMachines Lab II QuestionsAbhiram DonPas encore d'évaluation
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiPas encore d'évaluation
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuPas encore d'évaluation
- EquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction MotorDocument13 pagesEquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction Motoraili_avinashPas encore d'évaluation
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Lab #2 - Phase SequenceDocument6 pagesLab #2 - Phase SequenceJorge GuerreroPas encore d'évaluation
- 2.back To Back Test On Two Similar TransformersDocument5 pages2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiPas encore d'évaluation
- Experiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusDocument6 pagesExperiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusNikhil BindalPas encore d'évaluation
- Unit 3 - DC - MotorDocument39 pagesUnit 3 - DC - MotordhoniPas encore d'évaluation
- Experiment# 10: Measure The Power and Power Factor by Three Ammeter MethodDocument10 pagesExperiment# 10: Measure The Power and Power Factor by Three Ammeter MethodFarwa MunirPas encore d'évaluation
- DC MachinesDocument52 pagesDC MachinesArun Kumar100% (1)
- Power Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuDocument50 pagesPower Converters Lab Manual - M.Tech (PE&ED) - Prepared by Dr.T.DevarajuhodeeesvcetPas encore d'évaluation
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduPas encore d'évaluation
- Four Quadrant Chopper OperationDocument5 pagesFour Quadrant Chopper OperationSAIKAT100% (1)
- 2.sumpner's Test On A Pair of Single Phase TransformersDocument5 pages2.sumpner's Test On A Pair of Single Phase Transformerschandrakanth100% (2)
- 9.parallel Operation of Two Single Phase TransformersDocument4 pages9.parallel Operation of Two Single Phase Transformersmandadi_sailesh50% (2)
- Experiment No: 8 A) Familiarization With Construction and Working of A Transformer B) Verification of Turns Ratio of TransformerDocument3 pagesExperiment No: 8 A) Familiarization With Construction and Working of A Transformer B) Verification of Turns Ratio of TransformerSaad AliKhan0% (1)
- Uthd LabDocument5 pagesUthd Labanirban0% (1)
- Under Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodDocument6 pagesUnder Voltage Unbalance Using Circle: Analysis of Induction Motor The Diagram MethodHershal RockksPas encore d'évaluation
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDocument5 pages7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- Lab 8 - Sync Motor (V-Curves Characteristic) PDFDocument3 pagesLab 8 - Sync Motor (V-Curves Characteristic) PDFzawirPas encore d'évaluation
- 2.back To Back Test On Two Similar TransformersDocument5 pages2.back To Back Test On Two Similar Transformersmandadi_sailesh50% (2)
- Sumpner's Test On Two Similar TransformersDocument1 pageSumpner's Test On Two Similar Transformersmandadi_saileshPas encore d'évaluation
- 9.parallel Operation of Two Single Phase TransformersDocument4 pages9.parallel Operation of Two Single Phase Transformersmandadi_sailesh50% (2)
- Cover Page3Document1 pageCover Page3mandadi_saileshPas encore d'évaluation
- Regulation of A Three Phase Alternator: (Emf & MMF Method)Document1 pageRegulation of A Three Phase Alternator: (Emf & MMF Method)mandadi_saileshPas encore d'évaluation
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDocument5 pages7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- 5.regultion of A Three Phase Alternator (MMF Method)Document7 pages5.regultion of A Three Phase Alternator (MMF Method)mandadi_saileshPas encore d'évaluation
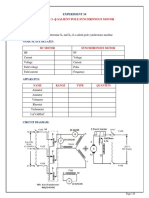
- 8.determination of XD and XQ of A Salient Pole Synchronous MachineDocument4 pages8.determination of XD and XQ of A Salient Pole Synchronous Machinemandadi_sailesh60% (5)
- Load Test on 3-Φ Induction MotorDocument1 pageLoad Test on 3-Φ Induction Motormandadi_saileshPas encore d'évaluation
- 1.o.c & S.C T Test On Single Phase TransformerDocument6 pages1.o.c & S.C T Test On Single Phase Transformermandadi_saileshPas encore d'évaluation
- Time Response of RL, RC & RLC Network TrainerDocument1 pageTime Response of RL, RC & RLC Network Trainermandadi_saileshPas encore d'évaluation
- Parallel Operation of Two Single Phase TransformersDocument1 pageParallel Operation of Two Single Phase Transformersmandadi_saileshPas encore d'évaluation
- Regulation of A Three Phase Alternator: (ZPF & Asa Methods)Document1 pageRegulation of A Three Phase Alternator: (ZPF & Asa Methods)mandadi_saileshPas encore d'évaluation
- Circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor TestsDocument1 pageCircle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor Testsmandadi_saileshPas encore d'évaluation
- No-Load & Blocked Rotor Test On Single Phase Induction MotorDocument1 pageNo-Load & Blocked Rotor Test On Single Phase Induction Motormandadi_saileshPas encore d'évaluation
- Brake Test On DC Compound MotorDocument1 pageBrake Test On DC Compound Motormandadi_saileshPas encore d'évaluation
- Determination of X & X Ofa Salient Pole Synchronous MachineDocument1 pageDetermination of X & X Ofa Salient Pole Synchronous Machinemandadi_saileshPas encore d'évaluation
- Sumpner's Test On Two Similar TransformersDocument1 pageSumpner's Test On Two Similar Transformersmandadi_saileshPas encore d'évaluation
- V-Curve & Inverted V-Curve for 3-Φ Synchronous MachineDocument1 pageV-Curve & Inverted V-Curve for 3-Φ Synchronous Machinemandadi_saileshPas encore d'évaluation
- Library: Astrology and WisdomDocument13 pagesLibrary: Astrology and Wisdomalimuhammedkhan2115Pas encore d'évaluation
- Veg Dum Biryani - Hyderabadi Veg Biryani Recipe - Hyderabadi Biryani - Hebbar's KitchenDocument2 pagesVeg Dum Biryani - Hyderabadi Veg Biryani Recipe - Hyderabadi Biryani - Hebbar's KitchenmusicalcarpetPas encore d'évaluation
- Legend Of Symbols: Chú Thích Các Ký HiệuDocument9 pagesLegend Of Symbols: Chú Thích Các Ký HiệuKiet TruongPas encore d'évaluation
- Anchor Chart-Describing Words-Descriptive Details of Setting and Character PDFDocument2 pagesAnchor Chart-Describing Words-Descriptive Details of Setting and Character PDFdellindiaPas encore d'évaluation
- Biochem Acids and Bases Lab ReportDocument4 pagesBiochem Acids and Bases Lab ReportShaina MabborangPas encore d'évaluation
- ForewordDocument96 pagesForewordkkcmPas encore d'évaluation
- Ah 1000Document1 pageAh 1000Zafir SihabuddinPas encore d'évaluation
- Benefits of OTN in Transport SDNDocument9 pagesBenefits of OTN in Transport SDNGhallab AlsadehPas encore d'évaluation
- SVR Neuro Quote 2 PROvidoDocument3 pagesSVR Neuro Quote 2 PROvidoChejarla Naveen KumarPas encore d'évaluation
- TXN Alarms 18022014Document12 pagesTXN Alarms 18022014Sid GrgPas encore d'évaluation
- BMS of Dubai International AirportDocument4 pagesBMS of Dubai International AirportJomari Carl Rafal MansuetoPas encore d'évaluation
- Annie Ovenden Exibition 2017Document19 pagesAnnie Ovenden Exibition 2017Vitaliy ChuenkoPas encore d'évaluation
- 1704 Broschuere Metal-Coating en EinzelseitenDocument8 pages1704 Broschuere Metal-Coating en EinzelseiteninterponPas encore d'évaluation
- Quality Traits in Cultivated Mushrooms and Consumer AcceptabilityDocument40 pagesQuality Traits in Cultivated Mushrooms and Consumer AcceptabilityShivendra SinghPas encore d'évaluation
- Nissan 720 L4-2.0-Z20 1983-86 Manual PDFDocument641 pagesNissan 720 L4-2.0-Z20 1983-86 Manual PDFEduardo Ariel JuarezPas encore d'évaluation
- Cho Gsas - Harvard 0084L 11462Document503 pagesCho Gsas - Harvard 0084L 11462Claudemiro costaPas encore d'évaluation
- Motor Starting: Why Do The Calculation?Document13 pagesMotor Starting: Why Do The Calculation?carlos_eqnPas encore d'évaluation
- 33 Mpact - of - The - Great - Earthquake-2015 - On - Hospitality PDFDocument30 pages33 Mpact - of - The - Great - Earthquake-2015 - On - Hospitality PDFJoannabelPas encore d'évaluation
- LINEAR INDUCTION MOTOR 6981660.ppsxDocument56 pagesLINEAR INDUCTION MOTOR 6981660.ppsxFalley FasterPas encore d'évaluation
- WPCE Wireline Lubricator With Threaded Unions PDFDocument1 pageWPCE Wireline Lubricator With Threaded Unions PDFDidik safdaliPas encore d'évaluation
- Technical Design of The Bukwimba Open Pit Final 12042017Document31 pagesTechnical Design of The Bukwimba Open Pit Final 12042017Rozalia PengoPas encore d'évaluation
- South Valley University Faculty of Science Geology Department Dr. Mohamed Youssef AliDocument29 pagesSouth Valley University Faculty of Science Geology Department Dr. Mohamed Youssef AliHari Dante Cry100% (1)
- Bomber JacketDocument3 pagesBomber JacketLaura Carrascosa FusterPas encore d'évaluation
- Wiring of The Distribution Board With RCD (Residual Current Devices) - Single Phase Home SupplyDocument14 pagesWiring of The Distribution Board With RCD (Residual Current Devices) - Single Phase Home SupplyKadhir BosePas encore d'évaluation
- Faithgirlz Handbook, Updated and ExpandedDocument15 pagesFaithgirlz Handbook, Updated and ExpandedFaithgirlz75% (4)
- No Client Too Far: Flexible Antenna Options TDMA GPS Sync ClientDocument2 pagesNo Client Too Far: Flexible Antenna Options TDMA GPS Sync ClientFelix MartinezPas encore d'évaluation
- Greek ArchitectureDocument16 pagesGreek ArchitectureXlyth RodriguezPas encore d'évaluation
- Camouflage Lesson PlanDocument4 pagesCamouflage Lesson Planapi-344569443Pas encore d'évaluation
- E Numbers Are Number Codes ForDocument3 pagesE Numbers Are Number Codes ForaradhyaPas encore d'évaluation
- DUPIXENT Doctor Discussion GuideDocument4 pagesDUPIXENT Doctor Discussion GuideTAP THANH CHAUPas encore d'évaluation