Vous aimerez peut-être aussi
- MQSI For TelemetryDocument35 pagesMQSI For TelemetrydcesentherPas encore d'évaluation
- Iot - Augmented With: Stm32 Mcus & Lora ™Document24 pagesIot - Augmented With: Stm32 Mcus & Lora ™dcesentherPas encore d'évaluation
- STM8S Value Line 8-Bit Microcontrollers PDFDocument2 pagesSTM8S Value Line 8-Bit Microcontrollers PDFdcesentherPas encore d'évaluation
- Memory Products - Package Outline and Mechanical Data: Symb MM Inches Typ Min Max Typ Min MaxDocument1 pageMemory Products - Package Outline and Mechanical Data: Symb MM Inches Typ Min Max Typ Min MaxdcesentherPas encore d'évaluation
- HTS221 Humidity and Temp Sensor-DigitalDocument31 pagesHTS221 Humidity and Temp Sensor-DigitaldcesentherPas encore d'évaluation
- Cooking With Food Storage Ingredients PDFDocument61 pagesCooking With Food Storage Ingredients PDFdcesenther100% (3)
- Woodsmith Magazine - Plans Now - Build Your Own Kitchen CabinetsDocument13 pagesWoodsmith Magazine - Plans Now - Build Your Own Kitchen Cabinetsdcesenther75% (4)
- Power Management For IoTDocument32 pagesPower Management For IoTdcesentherPas encore d'évaluation
- Electric Field Coulomb's Law HandoutDocument1 pageElectric Field Coulomb's Law HandoutdcesentherPas encore d'évaluation
- 12 Electric Fields ContinuedDocument22 pages12 Electric Fields ContinueddcesentherPas encore d'évaluation
- 9 Mach Cones & BeatsDocument34 pages9 Mach Cones & BeatsdcesentherPas encore d'évaluation
- BR STM 320512Document12 pagesBR STM 320512dcesentherPas encore d'évaluation
- STM32 F0 Series Entry-Level Cortex - M0 Mcu: STM32 DNA at Budget PriceDocument2 pagesSTM32 F0 Series Entry-Level Cortex - M0 Mcu: STM32 DNA at Budget PricedcesentherPas encore d'évaluation
- UM1525 STM32F0 Discovery Kit User ManualDocument31 pagesUM1525 STM32F0 Discovery Kit User ManualdcesentherPas encore d'évaluation
- STM32 Companion Chip Summary - ESD&iPadDocument3 pagesSTM32 Companion Chip Summary - ESD&iPaddcesentherPas encore d'évaluation
- STM32 - Overview and Motor Control - 2015Document29 pagesSTM32 - Overview and Motor Control - 2015dcesentherPas encore d'évaluation
- 492 - High Security SupervisorsDocument1 page492 - High Security SupervisorsdcesentherPas encore d'évaluation
- 549-High Microprocessor SupervisorsDocument1 page549-High Microprocessor SupervisorsdcesentherPas encore d'évaluation
- Snubberless Logic Level and Standard 8 A TriacsDocument18 pagesSnubberless Logic Level and Standard 8 A TriacsdcesentherPas encore d'évaluation
- Using The Hardware Real-Time Clock-RTC DM00025071Document45 pagesUsing The Hardware Real-Time Clock-RTC DM00025071dcesenther100% (1)
- Automotive Inertial ModuleDocument10 pagesAutomotive Inertial ModuledcesentherPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- cschip-CSC7224 C2920859Document5 pagescschip-CSC7224 C2920859Sridhar kvv100% (1)
- Ijert Ijert: Lighting Control System Using Power Line Communication NetworkingDocument7 pagesIjert Ijert: Lighting Control System Using Power Line Communication NetworkingSỹ RonPas encore d'évaluation
- Ardurino Intelligent Irrigation SolutionDocument13 pagesArdurino Intelligent Irrigation SolutionNoor MmPas encore d'évaluation
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocument7 pagesControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelPas encore d'évaluation
- CMT2189A Datasheet-EN-V0.8-2020915Document67 pagesCMT2189A Datasheet-EN-V0.8-2020915Rudraksh GandharvaPas encore d'évaluation
- Effective EMI Filter Design Method of Singlephase Inverter Based On Noise Source ImpedanceDocument6 pagesEffective EMI Filter Design Method of Singlephase Inverter Based On Noise Source ImpedanceToánPas encore d'évaluation
- SC3 PDFDocument210 pagesSC3 PDFArif HendrawanPas encore d'évaluation
- Description Features: Ltc4100 Smart Battery Charger ControllerDocument30 pagesDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasPas encore d'évaluation
- Power Semiconductor Devices ThyristorsDocument140 pagesPower Semiconductor Devices ThyristorsNomanPas encore d'évaluation
- Tristar Modbus Specification Morningstar Corporation V04 6 September 2012Document30 pagesTristar Modbus Specification Morningstar Corporation V04 6 September 2012a.anugrahPas encore d'évaluation
- BBOXX Product BrochureDocument52 pagesBBOXX Product Brochuremanojk_mPas encore d'évaluation
- Lab1 Pulse Modulation FACETDocument5 pagesLab1 Pulse Modulation FACETNabil Hilman Jaafar100% (1)
- 8049Document239 pages8049adnantanPas encore d'évaluation
- Signal and NoiseDocument8 pagesSignal and Noisecapm_cert7897Pas encore d'évaluation
- IGBT MitsubishiDocument18 pagesIGBT Mitsubishimadhuvariar78% (9)
- User Manual of DYP-A01-V2.0: Waterproof Ultrasonic Distance Measuring ControllerDocument15 pagesUser Manual of DYP-A01-V2.0: Waterproof Ultrasonic Distance Measuring ControllerSantiago lealPas encore d'évaluation
- An010 en PDFDocument15 pagesAn010 en PDFAnonymous Z1RHn9EPas encore d'évaluation
- Mtech Power Electronics 2013Document46 pagesMtech Power Electronics 2013message4guruPas encore d'évaluation
- Power Elctronics Drives (LCVPA)Document18 pagesPower Elctronics Drives (LCVPA)Roshan ShanmughanPas encore d'évaluation
- Hannstar Product Specification: Model: Hsd101Pww1Document29 pagesHannstar Product Specification: Model: Hsd101Pww1Milan HouskaPas encore d'évaluation
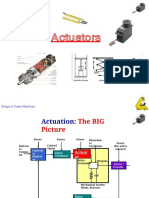
- ActuatorsDocument51 pagesActuatorsApdo MustafaPas encore d'évaluation
- Elektor USA - January, February 2015 PDFDocument132 pagesElektor USA - January, February 2015 PDFDalibor DanevskiPas encore d'évaluation
- World Encoders CatalogDocument78 pagesWorld Encoders CatalogQuantumAutomation100% (1)
- IGBT Vs MOSFET - Which Device To Select PDFDocument40 pagesIGBT Vs MOSFET - Which Device To Select PDFFulki Kautsar SPas encore d'évaluation
- Lead Acid Battery Desulfation Pulse GeneratorDocument11 pagesLead Acid Battery Desulfation Pulse GeneratoreldiavoloPas encore d'évaluation
- AP384XG Data SheetDocument13 pagesAP384XG Data Sheetjoseluise68Pas encore d'évaluation
- 3054 3056electronicDocument110 pages3054 3056electronicMohmed Abo Elftoh100% (5)
- D D D D D D D D: TL5001, TL5001A Pulse-Width-Modulation Control CircuitsDocument32 pagesD D D D D D D D: TL5001, TL5001A Pulse-Width-Modulation Control CircuitsLuisPas encore d'évaluation
- Dual-Channel Synchronous DC/DC Step-Down Controller With 5V/3.3V LdosDocument23 pagesDual-Channel Synchronous DC/DC Step-Down Controller With 5V/3.3V LdoskiryanoffPas encore d'évaluation