Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- US SeriesDocument13 pagesUS SeriesglopezdizPas encore d'évaluation
- TE13 & TE17 3-SpeedDocument166 pagesTE13 & TE17 3-SpeedAnonymous dYYLURM100% (2)
- Ropa Tiger 6 Englisch p600010gbDocument48 pagesRopa Tiger 6 Englisch p600010gblauxingreyPas encore d'évaluation
- B160 (China II) WeichaiDocument2 pagesB160 (China II) WeichaiAnggaPas encore d'évaluation
- SDLG L936H Wheel Loader - BrochureDocument3 pagesSDLG L936H Wheel Loader - BrochureJonathan Kale100% (1)
- 02 GBDocument9 pages02 GBjahzoonePas encore d'évaluation
- Nissan Mazda Re4r01a Transmission Repair Manual Atsg Automatic Transmission Service GroupDocument96 pagesNissan Mazda Re4r01a Transmission Repair Manual Atsg Automatic Transmission Service GroupSebastian Ruiz Peralta100% (1)
- Sidel DrawingDocument169 pagesSidel Drawingamzad0681% (26)
- 1997 Tech Report JouleDocument14 pages1997 Tech Report JoulePrasad MadhavanPas encore d'évaluation
- CEPE02100B1 - CAG-updated Jan 23-14 PDFDocument72 pagesCEPE02100B1 - CAG-updated Jan 23-14 PDFKar Foo ChanPas encore d'évaluation
- BMW E39 Brochure 2003 EuroDocument10 pagesBMW E39 Brochure 2003 EuromnbvqwertPas encore d'évaluation
- 2016 PG Chevrolet Colorado 092915Document14 pages2016 PG Chevrolet Colorado 092915Tetsunari KodaPas encore d'évaluation
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocument5 pagesDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemPas encore d'évaluation
- Quick Change Gearbox: Instructions For Installation and Operation Pictorial Parts ListDocument10 pagesQuick Change Gearbox: Instructions For Installation and Operation Pictorial Parts ListhrjeldesPas encore d'évaluation
- Technical Data Sheets Recommendations: WWW - ABER.ptDocument15 pagesTechnical Data Sheets Recommendations: WWW - ABER.ptРома БлошенкоPas encore d'évaluation
- Design and Development of Box Shifting Mechanism Using Gearless Power Transmission System1Document5 pagesDesign and Development of Box Shifting Mechanism Using Gearless Power Transmission System1International Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- tiếng anh chuyên ngànhDocument10 pagestiếng anh chuyên ngànhMạnh QuânPas encore d'évaluation
- Edoc - Pub Bobcat 773 Service Repair ManualDocument837 pagesEdoc - Pub Bobcat 773 Service Repair ManualЖеня Стець100% (2)
- Avenger 220 SPC 01 Feb 13Document44 pagesAvenger 220 SPC 01 Feb 13Sourabh TiwariPas encore d'évaluation
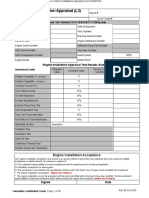
- CAT C9.3-C18 T4i Under 750hp L3 Rev06Document38 pagesCAT C9.3-C18 T4i Under 750hp L3 Rev06Ebied Yousif AlyPas encore d'évaluation
- Articulado PDFDocument90 pagesArticulado PDFMiguel Fuentes100% (1)
- Torque TranducerDocument24 pagesTorque Tranducertera100% (1)
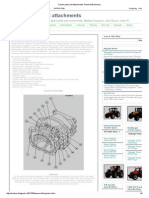
- Tractor Parts and Attachments: Powershift GearboxDocument6 pagesTractor Parts and Attachments: Powershift Gearboxaritmetics100% (1)
- Bajaj Rouser 180 Ver. 2017Document73 pagesBajaj Rouser 180 Ver. 2017Xing Chi ZhangPas encore d'évaluation
- Formula 1 Racer Gears Up With Carbon Fiber PDFDocument3 pagesFormula 1 Racer Gears Up With Carbon Fiber PDFAnkitaPas encore d'évaluation
- Background of Manual TransmissionDocument3 pagesBackground of Manual TransmissionAlgie PlondayaPas encore d'évaluation
- Owner'S/Operator'S Manual: WarningDocument118 pagesOwner'S/Operator'S Manual: Warning任宇杰Pas encore d'évaluation
- Bma4723 Vehicle Dynamics Chap 22Document35 pagesBma4723 Vehicle Dynamics Chap 22Fu HongPas encore d'évaluation
- DrumDocument10 pagesDrumSaeedAkbarzadehPas encore d'évaluation