Vous aimerez peut-être aussi
- dsPIC Microcontrolador AvanzadoDocument132 pagesdsPIC Microcontrolador AvanzadoAngel Flores RojasPas encore d'évaluation
- Todo Sobre Microcontroladores Club Saber ElectrónicaDocument85 pagesTodo Sobre Microcontroladores Club Saber ElectrónicaAriel ChumaceroPas encore d'évaluation
- Arquitectura basada en contexto para el soporte de servicios de VoD de IPTD'EverandArquitectura basada en contexto para el soporte de servicios de VoD de IPTPas encore d'évaluation
- ATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFDocument4 pagesATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFPaco AlemanyPas encore d'évaluation
- Manual Del Home Boe-Bot en CastellanoDocument259 pagesManual Del Home Boe-Bot en Castellanonaun_rincon100% (1)
- Microcontroladores Historia - Arquitectura AplicacionesDocument89 pagesMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniPas encore d'évaluation
- Guia Pics CompletaDocument142 pagesGuia Pics Completaapi-27535945100% (4)
- CONTROL MOTOR PASO A PASODocument12 pagesCONTROL MOTOR PASO A PASOFé Gabriela100% (1)
- Programacion Atmega128Document29 pagesProgramacion Atmega128Master George LMPas encore d'évaluation
- Programación básica DSPIC33FJ en C con MPLABXDocument5 pagesProgramación básica DSPIC33FJ en C con MPLABXJhon Ore100% (1)
- Manual HFK 010uDocument10 pagesManual HFK 010ujonathanPas encore d'évaluation
- Implementando DspicDocument122 pagesImplementando DspicRichard Moore100% (1)
- Separata Autc - Movicon x11Document71 pagesSeparata Autc - Movicon x11Juan CardenasPas encore d'évaluation
- Memristor: Una nueva era de aplicaciones más allá de la ley de Moore para la computaciónD'EverandMemristor: Una nueva era de aplicaciones más allá de la ley de Moore para la computaciónPas encore d'évaluation
- PicBasicPro en CastellanoDocument58 pagesPicBasicPro en CastellanoCarlos ZugnoniPas encore d'évaluation
- Manual PIC 18F4550-1Document244 pagesManual PIC 18F4550-1Sandro Julián Panana EspinoPas encore d'évaluation
- MANUAL DE PRÁCTICAS DE SISTEMAS DIGITALES II-aDocument79 pagesMANUAL DE PRÁCTICAS DE SISTEMAS DIGITALES II-aElizabeth Manzano ZavalaPas encore d'évaluation
- Circuitos Secuenciales SincronosDocument5 pagesCircuitos Secuenciales SincronosDaniela SevillaPas encore d'évaluation
- Programación Basica de Microcontroladores PIC en CDocument6 pagesProgramación Basica de Microcontroladores PIC en CMijael Edward Ttacca HuallaPas encore d'évaluation
- Informe Seguidor de Linea4Document29 pagesInforme Seguidor de Linea4Fernando NancoPas encore d'évaluation
- Manual PICCITO 16F88Document9 pagesManual PICCITO 16F88Jose Chambilla100% (1)
- Manejo de LCD y GLCDDocument18 pagesManejo de LCD y GLCDLuisHernandezPas encore d'évaluation
- Practica 9 ESP32 Con Conectividad Con THINGSPEAKDocument10 pagesPractica 9 ESP32 Con Conectividad Con THINGSPEAKBRIANT VALLES VADILLOPas encore d'évaluation
- Contador ascendente y LED parDocument3 pagesContador ascendente y LED parAsesorias PipePas encore d'évaluation
- ARM I (LPC) - ARM Cortex-M0+Document114 pagesARM I (LPC) - ARM Cortex-M0+Miguel Garcia100% (1)
- P04r Bootloader HID USB PDFDocument11 pagesP04r Bootloader HID USB PDFangelaPas encore d'évaluation
- PicBasic PRO CompilerDocument25 pagesPicBasic PRO CompilerkemetvictPas encore d'évaluation
- Interfaz para Puerto Paralelo LPTDocument8 pagesInterfaz para Puerto Paralelo LPTeduard_perdomo_1Pas encore d'évaluation
- Reloj Aereo o Pantalla PovDocument7 pagesReloj Aereo o Pantalla PovJONATHAN TERAN RUIZPas encore d'évaluation
- Inversión de Giro de Un MotorDocument3 pagesInversión de Giro de Un Motorηχητικός σκιά100% (1)
- Tutorial Soft ESP32Document15 pagesTutorial Soft ESP32cynthiPas encore d'évaluation
- PreP05 Comunicacion USB PC VB y PIC18F4550 MikroCDocument2 pagesPreP05 Comunicacion USB PC VB y PIC18F4550 MikroCxoroger100% (1)
- Libro MIKROC Milan VerleDocument402 pagesLibro MIKROC Milan Verlepierdonne100% (3)
- Implementacion de BootloaderDocument5 pagesImplementacion de BootloaderManuel HTPas encore d'évaluation
- Informe Sistemas Microprocesados Con AVR Atmega16Document25 pagesInforme Sistemas Microprocesados Con AVR Atmega16AgneliusPas encore d'évaluation
- P05 Programacion en MikroBasicDocument9 pagesP05 Programacion en MikroBasicRicardo NarvaezPas encore d'évaluation
- Proyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877ADocument5 pagesProyecto Final Semaforos Inteligentes Con El Microcontrolador PIC 16F877AJohnAndersonEspaña0% (1)
- Curso Básico de Microcontroladores PICDocument50 pagesCurso Básico de Microcontroladores PICEdison Correa0% (1)
- Programando PICs CCS 01 PDFDocument7 pagesProgramando PICs CCS 01 PDFFrancisco Javier Galvan RojasPas encore d'évaluation
- S03.s01-Guia de Laboratorio 01 PDFDocument3 pagesS03.s01-Guia de Laboratorio 01 PDFGiancarloFabianPas encore d'évaluation
- Cloud ComputingDocument36 pagesCloud ComputingSergio FloresPas encore d'évaluation
- Informe 1 DACDocument9 pagesInforme 1 DACJose ArmandoPas encore d'évaluation
- Curso de Programación de PIC en PICBasic Pro - Página 4Document93 pagesCurso de Programación de PIC en PICBasic Pro - Página 4Rene Gonzales VasquezPas encore d'évaluation
- Tutorial ATmegaDocument17 pagesTutorial ATmegajubjub92Pas encore d'évaluation
- PCW, Proteus y Pickit - Pasos para Creacion de Programa y Grabacion en PicDocument7 pagesPCW, Proteus y Pickit - Pasos para Creacion de Programa y Grabacion en Picjsrosero3250Pas encore d'évaluation
- Diseño de Dos WarbotsDocument103 pagesDiseño de Dos WarbotsAXELPas encore d'évaluation
- Microcontroladores AVRDocument3 pagesMicrocontroladores AVRMarcos EstrellaPas encore d'évaluation
- P01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaDocument15 pagesP01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaaLciLPas encore d'évaluation
- Práctica 9 Microprocesadores II PWMDocument6 pagesPráctica 9 Microprocesadores II PWMBoris ZuñigaPas encore d'évaluation
- IV congreso internacional de ingenierías: La ingeniería como base del desarrolloD'EverandIV congreso internacional de ingenierías: La ingeniería como base del desarrolloPas encore d'évaluation
- Li-Fi: Redes consistentes y de alta velocidad basadas en luzD'EverandLi-Fi: Redes consistentes y de alta velocidad basadas en luzPas encore d'évaluation
- Manual UNI-DS6 CompletoDocument17 pagesManual UNI-DS6 CompletoPablo PhilcoPas encore d'évaluation
- Informe de Micros Contador Descendente Del 9 Al 0Document10 pagesInforme de Micros Contador Descendente Del 9 Al 0Alex AndradePas encore d'évaluation
- Guía de Diseño y DAQDocument21 pagesGuía de Diseño y DAQYIMY JUSSEPPY ZAMBRANO ZAMBRANOPas encore d'évaluation
- Programación ARDUINODocument17 pagesProgramación ARDUINOFlakita VianethPas encore d'évaluation
- Manual Usuario Entrenador Universal Pic18Document12 pagesManual Usuario Entrenador Universal Pic18Carlos CastilloPas encore d'évaluation
- Hsi Taller 4Document15 pagesHsi Taller 4EIEEPas encore d'évaluation
- Eider SensorDocument7 pagesEider Sensoreduardo pastor de jesusPas encore d'évaluation
- ACTIVIDADn1nCONVERSORnADCnPIC 94610f3f4a8fffeDocument8 pagesACTIVIDADn1nCONVERSORnADCnPIC 94610f3f4a8fffePEDROPas encore d'évaluation
- BLADE BP Manual V2.en - EsDocument20 pagesBLADE BP Manual V2.en - EsDiego RomeroPas encore d'évaluation
- Alarma Contra Ladrones Con Un SCRDocument3 pagesAlarma Contra Ladrones Con Un SCREdiPas encore d'évaluation
- El DiodoDocument4 pagesEl DiodoKaterine Lotero LondoñoPas encore d'évaluation
- Circuito Amplificador Con TDA7377 + PREamp + VUmetro + PCBDocument10 pagesCircuito Amplificador Con TDA7377 + PREamp + VUmetro + PCBEnya Andrea Ribba Hernandez100% (1)
- Cuestionarios ComunicacionesDocument40 pagesCuestionarios ComunicacionesKarlita SanchezPas encore d'évaluation
- APU Banco de PruebasDocument2 pagesAPU Banco de PruebasJesús AlfredoPas encore d'évaluation
- Conector N PDFDocument2 pagesConector N PDFInternational RadioPas encore d'évaluation
- BalumDocument4 pagesBalumChristian PizanánPas encore d'évaluation
- Capítulo 1Document30 pagesCapítulo 1Moisés Raymundo Rojas SantiagoPas encore d'évaluation
- ComSerial PIC-PC USARTDocument8 pagesComSerial PIC-PC USARTDavid Mercado BPas encore d'évaluation
- PAE RogerRaventos JuanCamara Practica3Document21 pagesPAE RogerRaventos JuanCamara Practica3Anonymous ccGNagfmGPas encore d'évaluation
- Tema 9 Familias Logicas 2020Document92 pagesTema 9 Familias Logicas 2020Eduardo VelezPas encore d'évaluation
- Las Mejores Herramientas de Desarrollo PDocument15 pagesLas Mejores Herramientas de Desarrollo Pecua toursPas encore d'évaluation
- Comunicacion Serial Con Atmega32Document6 pagesComunicacion Serial Con Atmega32Daniel GutierrezPas encore d'évaluation
- 1er. Laboratorio 5to Compu 2018Document13 pages1er. Laboratorio 5to Compu 2018ckdkgvfdkgPas encore d'évaluation
- Circuitos electrónicos protoboard y su funcionamientoDocument3 pagesCircuitos electrónicos protoboard y su funcionamientoAndré LlivicuraPas encore d'évaluation
- Resumen OsciladoresDocument8 pagesResumen OsciladoresGorras New EraPas encore d'évaluation
- RF-7800B-DU024 BGAN - Spanish - tcm26-14528Document2 pagesRF-7800B-DU024 BGAN - Spanish - tcm26-14528Juan Luis Garcia SantanderPas encore d'évaluation
- Tema 3. Transistores de Union Bipolar BJTDocument29 pagesTema 3. Transistores de Union Bipolar BJTChristian deluquezPas encore d'évaluation
- AYF OPI 1 Introduccion Informatica Equipos Arquitectura ADocument13 pagesAYF OPI 1 Introduccion Informatica Equipos Arquitectura Aprueba123Pas encore d'évaluation
- Amplificadores A VálvulasDocument6 pagesAmplificadores A VálvulasMiguelAndresFajardoHernandezPas encore d'évaluation
- Fundamentos de Electroìnica AnaloìgicaDocument122 pagesFundamentos de Electroìnica Analoìgicacontacto.rhreclutamientoaPas encore d'évaluation
- Modulo Splice IIDocument23 pagesModulo Splice IIrmarmPas encore d'évaluation
- Cuestionario TicsDocument4 pagesCuestionario TicsvenforstalPas encore d'évaluation
- G1.Larrea - Criollo.eddy - Sistemas de Comunicacion de DatosDocument19 pagesG1.Larrea - Criollo.eddy - Sistemas de Comunicacion de DatosLeonardoPas encore d'évaluation
- Electrónica de PotenciaDocument20 pagesElectrónica de PotenciaGeovass RockPas encore d'évaluation
- Diseños y Transceptores. - Walkie Talkie Simple 27Mhz AM RegenerativaDocument4 pagesDiseños y Transceptores. - Walkie Talkie Simple 27Mhz AM RegenerativaVictor Manuel Vilasuso MairenaPas encore d'évaluation
- Paper AntenasDocument5 pagesPaper AntenasJoel DitPas encore d'évaluation
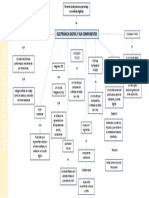
- Mapa Conceptual Electrónica Digital y Sus ComponentesDocument1 pageMapa Conceptual Electrónica Digital y Sus ComponentesBeatrizPas encore d'évaluation