Vous aimerez peut-être aussi
- ABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDFDocument238 pagesABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDForefat1Pas encore d'évaluation
- PC Assembly PlantDocument19 pagesPC Assembly Plantmuyenzo100% (1)
- Design of Linear Array Transducer Using Ultrasound Simulation Program Field-IIDocument7 pagesDesign of Linear Array Transducer Using Ultrasound Simulation Program Field-IIinventyPas encore d'évaluation
- Basic Principles of Local GovernmentDocument72 pagesBasic Principles of Local GovernmentAnne Camille SongPas encore d'évaluation
- LOD Spec 2016 Part I 2016-10-19 PDFDocument207 pagesLOD Spec 2016 Part I 2016-10-19 PDFzakariazulkifli92Pas encore d'évaluation
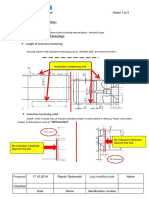
- Induction Hardening - Interpretation of Drawing & Testing PDFDocument4 pagesInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHPas encore d'évaluation
- SAR Image Formation Toolbox For MATLABDocument13 pagesSAR Image Formation Toolbox For MATLABLissete VergaraPas encore d'évaluation
- Stories of Prophets - 2Document19 pagesStories of Prophets - 2Hadis MusaPas encore d'évaluation
- IWEX: Direct Ultrasonic Imaging of Subsurface DefectsDocument5 pagesIWEX: Direct Ultrasonic Imaging of Subsurface DefectsIndigo WavePas encore d'évaluation
- Nakshatra Exaltation DebilitationDocument3 pagesNakshatra Exaltation DebilitationBhanu Pinnamaneni100% (1)
- CMP Crossceoraltion - 1Document15 pagesCMP Crossceoraltion - 1waqarPas encore d'évaluation
- IR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVDocument5 pagesIR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVinventionjournalsPas encore d'évaluation
- Yao 1990Document13 pagesYao 1990Anna PawłowskaPas encore d'évaluation
- Engineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmDocument11 pagesEngineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmEngineering JournalPas encore d'évaluation
- 1992 04 Application Od Uniform Linear Array Bearing Estimation Techniques To Uniform Circular Arrays PDFDocument4 pages1992 04 Application Od Uniform Linear Array Bearing Estimation Techniques To Uniform Circular Arrays PDFDania AlashariPas encore d'évaluation
- Application of High Resolution Direction Finding Algorithms in Mobile CommunicationsDocument6 pagesApplication of High Resolution Direction Finding Algorithms in Mobile CommunicationsLamiae SqualiPas encore d'évaluation
- INS/GPS/SAR Integrated Navigation With Image GeocodingDocument7 pagesINS/GPS/SAR Integrated Navigation With Image GeocodingJuan Manuel MauroPas encore d'évaluation
- SAR image range resolution using MUSIC algorithmDocument5 pagesSAR image range resolution using MUSIC algorithmletiendung_dtvt7119Pas encore d'évaluation
- Affes: EstimationDocument4 pagesAffes: Estimationscribd1235207Pas encore d'évaluation
- Optimum Beamformers for UCAs in Correlated EnvironmentsDocument4 pagesOptimum Beamformers for UCAs in Correlated EnvironmentsGanga KklPas encore d'évaluation
- Radar Emitter Recognition Using Intrapulse Data: Adam Kawalec', Robert OwczarektDocument4 pagesRadar Emitter Recognition Using Intrapulse Data: Adam Kawalec', Robert OwczarektHossein NazariPas encore d'évaluation
- Esprit AlgorithmDocument5 pagesEsprit Algorithmrameshmc1Pas encore d'évaluation
- Nicholson Ross Extraction MethodDocument6 pagesNicholson Ross Extraction MethodTom SebastianPas encore d'évaluation
- Near Field Phased Array DOA and Range Estimation of UHF RFID TagsDocument5 pagesNear Field Phased Array DOA and Range Estimation of UHF RFID TagsTharindu Samith AbeywickramaPas encore d'évaluation
- SAR Image Simulation With Application To Target ReDocument24 pagesSAR Image Simulation With Application To Target ReDenis GrigorenkoPas encore d'évaluation
- Sar SummaryDocument14 pagesSar Summarynaivedya_mishraPas encore d'évaluation
- Experimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARDocument5 pagesExperimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARkudriashovvladimirPas encore d'évaluation
- Adaptive Antenna Selection and TX/RX Beamforming For Large-Scale Mimo Systems in 60Ghz ChannelsDocument30 pagesAdaptive Antenna Selection and TX/RX Beamforming For Large-Scale Mimo Systems in 60Ghz Channelsamgad2010Pas encore d'évaluation
- Iterative Compensation of Microphone Array and Sound Source Movements Based On Minimization of Arrival Time DifferencesDocument5 pagesIterative Compensation of Microphone Array and Sound Source Movements Based On Minimization of Arrival Time Differencesscribd1235207Pas encore d'évaluation
- Range Distance Requirements For Large Antenna Measurements For Linear Aperture With Uniform Field DistributionDocument8 pagesRange Distance Requirements For Large Antenna Measurements For Linear Aperture With Uniform Field DistributionPoornima ChinthalaPas encore d'évaluation
- Adaptive Antenna Systems: Widrow, E. GoodeDocument17 pagesAdaptive Antenna Systems: Widrow, E. GoodeKhal ZeratulPas encore d'évaluation
- SPECTRALDocument6 pagesSPECTRALlogu_thalirPas encore d'évaluation
- GCCDocument14 pagesGCCAlif Bayu WindrawanPas encore d'évaluation
- Final Modified 1-2Document102 pagesFinal Modified 1-2Mentsnot MossiePas encore d'évaluation
- A, (M) B, (M) : of ForDocument6 pagesA, (M) B, (M) : of ForGaurav KumarPas encore d'évaluation
- Efficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory DeviationsDocument5 pagesEfficient Stripmap SAR Raw Data Generation Taking Into Account Sensor Trajectory Deviationsmani567Pas encore d'évaluation
- Principles of Synthetic Aperture RadarDocument12 pagesPrinciples of Synthetic Aperture RadarciaobubuPas encore d'évaluation
- SONAR SIGNAL PROCESSING BASED ON THE HARMONIC WAVELET TRANSFORMDocument5 pagesSONAR SIGNAL PROCESSING BASED ON THE HARMONIC WAVELET TRANSFORMZahid Hameed QaziPas encore d'évaluation
- muller2020 (1)Document4 pagesmuller2020 (1)AHMADPas encore d'évaluation
- Implementation of An Adaptive Antenna Array Using The TMS320C541Document11 pagesImplementation of An Adaptive Antenna Array Using The TMS320C541Harshvardhan ChoudharyPas encore d'évaluation
- Subspace MethodsDocument47 pagesSubspace MethodsSukanya VemulapalliPas encore d'évaluation
- Estimation Broadband: of Angles of Arrivals ofDocument4 pagesEstimation Broadband: of Angles of Arrivals ofashaw002Pas encore d'évaluation
- SQR Algo Dir Ls 07Document6 pagesSQR Algo Dir Ls 07rocinguyPas encore d'évaluation
- Bearing Defect Identification Using Acoustic Emission SignalsDocument7 pagesBearing Defect Identification Using Acoustic Emission Signalsmhsgh2003Pas encore d'évaluation
- 1d S Bency Abraham HighDocument6 pages1d S Bency Abraham HighJuan Dela CruzPas encore d'évaluation
- Noise Reduction Method For Terrain Phase Estmation - Version 1.0Document6 pagesNoise Reduction Method For Terrain Phase Estmation - Version 1.0Sp LeePas encore d'évaluation
- Modelling and Performance Analysis of Doa Estimation in Adaptive Signal ProcessingDocument4 pagesModelling and Performance Analysis of Doa Estimation in Adaptive Signal ProcessingVinod Kumar GirrohPas encore d'évaluation
- Extraction of Radar Signal Using Auto-Correlation Functions: Umoh, Gabriel Etim, Akpan, Aniefiok OtuDocument5 pagesExtraction of Radar Signal Using Auto-Correlation Functions: Umoh, Gabriel Etim, Akpan, Aniefiok OtuAnonymous WkbmWCa8MPas encore d'évaluation
- UBICC - Samira - 94 - 608 - 608Document8 pagesUBICC - Samira - 94 - 608 - 608Ubiquitous Computing and Communication JournalPas encore d'évaluation
- Maximum Likelihood Estimation of Array Element Location and MVDR Beamforming Simulation and Experimental ResultsDocument5 pagesMaximum Likelihood Estimation of Array Element Location and MVDR Beamforming Simulation and Experimental ResultsMayssa RjaibiaPas encore d'évaluation
- 5005 SCDocument6 pages5005 SCneerajPas encore d'évaluation
- Frequency-Radial Duality Based Photoacoustic ReconstructionDocument3 pagesFrequency-Radial Duality Based Photoacoustic ReconstructionS.M. Akramus SalehinPas encore d'évaluation
- SPAWC 2013 Liao Etal HandoverOptimizationDocument5 pagesSPAWC 2013 Liao Etal HandoverOptimizationmimbrillitoPas encore d'évaluation
- Range FMCW: Performance Analysis in Linear RadarDocument4 pagesRange FMCW: Performance Analysis in Linear RadarSrinivas CherukuPas encore d'évaluation
- A Novel Correlation Sum Method For Cognitive Radio Spectrum SensingDocument4 pagesA Novel Correlation Sum Method For Cognitive Radio Spectrum SensingAnurag BansalPas encore d'évaluation
- D D U P: Analytical RadDocument8 pagesD D U P: Analytical RadRnav rnavPas encore d'évaluation
- Periodic Sequences With Optimal Properties For Channel Estimation and Fast Start-Up EqualizationDocument6 pagesPeriodic Sequences With Optimal Properties For Channel Estimation and Fast Start-Up Equalizationbavar88Pas encore d'évaluation
- Modeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaDocument7 pagesModeling Radar On Global Positioning System: Department of Electronics, RTU, IndiaIJRAERPas encore d'évaluation
- Broadband Source Angle Estimation Using: A Sparse Uniform Linear Acoustic ArrayDocument6 pagesBroadband Source Angle Estimation Using: A Sparse Uniform Linear Acoustic Arrayscribd1235207Pas encore d'évaluation
- Hologram Matrix and Its Application to a Novel RadarDocument2 pagesHologram Matrix and Its Application to a Novel RadarRitesh SinghPas encore d'évaluation
- Cross Correlation and Autocorrelation On MatlabDocument14 pagesCross Correlation and Autocorrelation On Matlabmuddassir07100% (7)
- Reducing Front-End Bandwidth May Improve Digital GNSS Receiver PerformanceDocument6 pagesReducing Front-End Bandwidth May Improve Digital GNSS Receiver Performanceyaro82Pas encore d'évaluation
- RadarDocument16 pagesRadarACLINPas encore d'évaluation
- Aeromagnetic Survey DesignDocument4 pagesAeromagnetic Survey DesignAnggit Pramudita WicaksonoPas encore d'évaluation
- Color Texture Classication by Integrative Co-Occurrence MatricesDocument12 pagesColor Texture Classication by Integrative Co-Occurrence MatricesmiusayPas encore d'évaluation
- MATLAB Pattern Recognition GuideDocument58 pagesMATLAB Pattern Recognition GuidemiusayPas encore d'évaluation
- GLCMDocument14 pagesGLCMindorayabtPas encore d'évaluation
- Symmetry 02 01081Document18 pagesSymmetry 02 01081miusayPas encore d'évaluation
- A Comparative Study of Texture Measures (1996-Cited1797)Document9 pagesA Comparative Study of Texture Measures (1996-Cited1797)miusayPas encore d'évaluation
- 64-Comparison and Analysis of Remote Sensing Data Fusion TechniquesDocument5 pages64-Comparison and Analysis of Remote Sensing Data Fusion TechniquesmiusayPas encore d'évaluation
- 1999 IEEE DefinitionDocument4 pages1999 IEEE DefinitionmiusayPas encore d'évaluation
- 3-Introduction of Sensor Spectral Response Into Image Fusion Methods (2005-Cited170)Document10 pages3-Introduction of Sensor Spectral Response Into Image Fusion Methods (2005-Cited170)miusayPas encore d'évaluation
- 1999 IEEE DefinitionDocument4 pages1999 IEEE DefinitionmiusayPas encore d'évaluation
- Evaluation of Texture Features For Content-Based Image RetrievalDocument9 pagesEvaluation of Texture Features For Content-Based Image RetrievalliketoendPas encore d'évaluation
- 1-A New Look at IHS-Like Image Fusion Method (2001-Cited340)Document10 pages1-A New Look at IHS-Like Image Fusion Method (2001-Cited340)miusayPas encore d'évaluation
- 66-A Fusion Methodology Based On Dempster-Shafer Evidence TheoryDocument4 pages66-A Fusion Methodology Based On Dempster-Shafer Evidence TheorymiusayPas encore d'évaluation
- 4-Image Fusion of Landsat ETM+ and SPOT Satellite Image Using IHS, Brovey and PCA (2007-Cited12)Document3 pages4-Image Fusion of Landsat ETM+ and SPOT Satellite Image Using IHS, Brovey and PCA (2007-Cited12)miusayPas encore d'évaluation
- PDFDocument8 pagesPDFmiusayPas encore d'évaluation
- Axially Corrugated HornDocument5 pagesAxially Corrugated HornmiusayPas encore d'évaluation
- Save 0002Document4 pagesSave 0002miusayPas encore d'évaluation
- 01526648Document3 pages01526648miusayPas encore d'évaluation
- Extraction of Buildings in Urban Areas From Very High Resolution Satellite ImagesDocument5 pagesExtraction of Buildings in Urban Areas From Very High Resolution Satellite ImagesmiusayPas encore d'évaluation
- Adaptive Filtering For Medical Image Based On 3-Order Tensor FieldDocument4 pagesAdaptive Filtering For Medical Image Based On 3-Order Tensor FieldmiusayPas encore d'évaluation
- Fuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsDocument3 pagesFuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsmiusayPas encore d'évaluation
- Undecipherable document in an unknown languageDocument2 pagesUndecipherable document in an unknown languagemiusayPas encore d'évaluation
- 0afb8eb841c81333f65a34e4ebff55feDocument4 pages0afb8eb841c81333f65a34e4ebff55femiusayPas encore d'évaluation
- A New Method For Image SegmentationDocument9 pagesA New Method For Image SegmentationmiusayPas encore d'évaluation
- Fuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsDocument3 pagesFuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsmiusayPas encore d'évaluation
- Fuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsDocument3 pagesFuzzy Logic Based Adaptive Noise Filter For Real Time Image Processing ApplicationsmiusayPas encore d'évaluation
- e38443a1b957c33306c13ec9e2ba95c1Document2 pagese38443a1b957c33306c13ec9e2ba95c1miusayPas encore d'évaluation
- d17ea3a5e8448f4c42567decfd24e670Document4 pagesd17ea3a5e8448f4c42567decfd24e670miusayPas encore d'évaluation
- Level set HSI segmentation using spectral edge and signature infoDocument7 pagesLevel set HSI segmentation using spectral edge and signature infomiusayPas encore d'évaluation
- Object Detection in High-Resolution Remote 2013Document5 pagesObject Detection in High-Resolution Remote 2013miusayPas encore d'évaluation
- MUCLecture 2021 10311889Document11 pagesMUCLecture 2021 10311889Ramon Angelo MendezPas encore d'évaluation
- Specifications Sheet ReddyDocument4 pagesSpecifications Sheet ReddyHenry CruzPas encore d'évaluation
- Three Bucket Method & Food ServiceDocument4 pagesThree Bucket Method & Food Servicerose zandrea demasisPas encore d'évaluation
- 1 John 2:15-27 - Bible Commentary For PreachingDocument6 pages1 John 2:15-27 - Bible Commentary For PreachingJacob D. GerberPas encore d'évaluation
- A Feature Selection Based On The Farmland Fertility Algorithm For Improved Intrusion Detection SystemsDocument27 pagesA Feature Selection Based On The Farmland Fertility Algorithm For Improved Intrusion Detection SystemsRashed ShakirPas encore d'évaluation
- Is Revalida ExamDocument11 pagesIs Revalida ExamRodriguez, Jhe-ann M.Pas encore d'évaluation
- Common Herbs and Foods Used As Galactogogues PDFDocument4 pagesCommon Herbs and Foods Used As Galactogogues PDFHadi El-MaskuryPas encore d'évaluation
- Whatever Happens, Happens For Something Good by MR SmileyDocument133 pagesWhatever Happens, Happens For Something Good by MR SmileyPrateek100% (3)
- GMsetDocument8 pagesGMsetdilo001Pas encore d'évaluation
- Kerala Electricity Regulatory Commission Schedule of TariffDocument36 pagesKerala Electricity Regulatory Commission Schedule of TariffvjtheeePas encore d'évaluation
- Uji Deteksi Biofilm Dari Isolat Klinik Kateter Urin Bakteri Entercoccus Dibandingkan Dengan Tube MethodDocument27 pagesUji Deteksi Biofilm Dari Isolat Klinik Kateter Urin Bakteri Entercoccus Dibandingkan Dengan Tube MethodIyannyanPas encore d'évaluation
- Qand ADocument5 pagesQand AJoshua PascasioPas encore d'évaluation
- BiologyDocument21 pagesBiologyHrituraj banikPas encore d'évaluation
- TP5 W9 S9 R0Document2 pagesTP5 W9 S9 R0DickiEffendy0% (1)
- Gerovital anti-aging skin care product guideDocument10 pagesGerovital anti-aging skin care product guideכרמן גאורגיהPas encore d'évaluation
- Anxiolytics Sedatives Hypnotics Pharm 3Document38 pagesAnxiolytics Sedatives Hypnotics Pharm 3Peter Harris100% (1)
- Company Profile 2Document7 pagesCompany Profile 2R Saravana KumarPas encore d'évaluation
- 35.2 - ING - El Puente NewsletterDocument13 pages35.2 - ING - El Puente NewsletterIrmali FrancoPas encore d'évaluation
- Kendriya vidyalaya reading comprehension and grammar questionsDocument7 pagesKendriya vidyalaya reading comprehension and grammar questionsRaam sivaPas encore d'évaluation
- Screenshot 2023-01-03 at 9.25.34 AM PDFDocument109 pagesScreenshot 2023-01-03 at 9.25.34 AM PDFAzri ZakwanPas encore d'évaluation
- Lect 17 Amp Freq RespDocument22 pagesLect 17 Amp Freq RespBent777Pas encore d'évaluation
- Chapter 7 (Additional Notes) Thermodynamics Review (Power Plant Technology by M Wakil)Document29 pagesChapter 7 (Additional Notes) Thermodynamics Review (Power Plant Technology by M Wakil)Aries SattiPas encore d'évaluation
- Animal Names in English and IndonesianDocument7 pagesAnimal Names in English and IndonesianAndi KurniawanPas encore d'évaluation