Vous aimerez peut-être aussi
- Digital Signal Processing: Instant AccessD'EverandDigital Signal Processing: Instant AccessÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)
- SOLDSPX06Document16 pagesSOLDSPX06Shafayet UddinPas encore d'évaluation
- Some Case Studies on Signal, Audio and Image Processing Using MatlabD'EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabPas encore d'évaluation
- Digital Signal ProcessingDocument7 pagesDigital Signal ProcessingJagadeesh KumarPas encore d'évaluation
- Software Radio: Sampling Rate Selection, Design and SynchronizationD'EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationPas encore d'évaluation
- Digital Signal Processing Exam QuestionsDocument8 pagesDigital Signal Processing Exam QuestionsecehodaietPas encore d'évaluation
- Analytical Modeling of Wireless Communication SystemsD'EverandAnalytical Modeling of Wireless Communication SystemsPas encore d'évaluation
- Set No: 1: Code No: V3218/R07Document6 pagesSet No: 1: Code No: V3218/R07Viswa ChaitanyaPas encore d'évaluation
- DSP QuestionsDocument8 pagesDSP Questionsjjshree79Pas encore d'évaluation
- Concepts of Fsdsdfsignal & Image ProcessingDocument6 pagesConcepts of Fsdsdfsignal & Image ProcessingPrahlad ReddyPas encore d'évaluation
- DFT, IIR and FIR filter design concepts for DSP courseDocument4 pagesDFT, IIR and FIR filter design concepts for DSP coursemonisa kannanPas encore d'évaluation
- DSP Integrated Circuits 4Document3 pagesDSP Integrated Circuits 4brindkowsiPas encore d'évaluation
- Sixth Semester B Tech (Enginee Ing) Degree Examination December 2 10Document2 pagesSixth Semester B Tech (Enginee Ing) Degree Examination December 2 10Abhishek EkPas encore d'évaluation
- Digital Signal Processing Question BankDocument4 pagesDigital Signal Processing Question BanksharlisreePas encore d'évaluation
- III Year - Electronics and Communication Engineering Ec 6502 - Principles of Digital Signal ProcessingDocument8 pagesIII Year - Electronics and Communication Engineering Ec 6502 - Principles of Digital Signal ProcessingYokesvaran KPas encore d'évaluation
- Question Bank: Subject Code: Subject NameDocument5 pagesQuestion Bank: Subject Code: Subject NamemsurendiranPas encore d'évaluation
- 6th sem.-EC 1358-DSPDocument8 pages6th sem.-EC 1358-DSPGautham LogarajPas encore d'évaluation
- Ece-Vii-dsp Algorithms & Architecture [10ec751]-Solution[1]Document79 pagesEce-Vii-dsp Algorithms & Architecture [10ec751]-Solution[1]sanjay prasadPas encore d'évaluation
- Digital Signal ProcessingDocument7 pagesDigital Signal ProcessingAhsan MalikPas encore d'évaluation
- Midterm Solution - COSC 3213 - Computer Networks 1Document13 pagesMidterm Solution - COSC 3213 - Computer Networks 1faesalhasanPas encore d'évaluation
- DSP PDFDocument0 pageDSP PDFvelkarthi92Pas encore d'évaluation
- DSP1Document6 pagesDSP1Santosh BanPas encore d'évaluation
- Digital Signal Processing QUESTION BANKDocument5 pagesDigital Signal Processing QUESTION BANKSaran SekaranPas encore d'évaluation
- Digital Signal Processing Exam QuestionsDocument8 pagesDigital Signal Processing Exam QuestionsBharath LudiPas encore d'évaluation
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFDocument13 pagesEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaPas encore d'évaluation
- B.Tech (EC, VI SEM) : Ii) All Questions Carry Equal MarksDocument2 pagesB.Tech (EC, VI SEM) : Ii) All Questions Carry Equal MarksRajPas encore d'évaluation
- DSP Important Questions Unit-WiseDocument6 pagesDSP Important Questions Unit-WiseRasool Reddy100% (4)
- Anna University Digital Signal Processing Question BankDocument6 pagesAnna University Digital Signal Processing Question Banks.ranjithPas encore d'évaluation
- DCC2006 SoundCardProgramming F6CTEDocument6 pagesDCC2006 SoundCardProgramming F6CTEProyec YectosPas encore d'évaluation
- Project Paper PDFDocument8 pagesProject Paper PDFGargi SharmaPas encore d'évaluation
- r05320201 Digital Signal ProcessingDocument8 pagesr05320201 Digital Signal ProcessingSri LalithaPas encore d'évaluation
- DSP Paper Questions on Sampling, DFT, FIR Filters & DSP ProcessorsDocument3 pagesDSP Paper Questions on Sampling, DFT, FIR Filters & DSP ProcessorsDhariniJeevanandamPas encore d'évaluation
- Digital Signal ProcessingDocument2 pagesDigital Signal ProcessingSreedeviRajithaPas encore d'évaluation
- 07a51101 Digital Signal ProcessingDocument8 pages07a51101 Digital Signal ProcessingSRINIVASA RAO GANTAPas encore d'évaluation
- Set No: 1: Code: V3218/R07 Digital Signal Processing Time: 3 Hours Max. Marks: 80Document4 pagesSet No: 1: Code: V3218/R07 Digital Signal Processing Time: 3 Hours Max. Marks: 80Manam Sundeep YadavPas encore d'évaluation
- Assignment 4Document3 pagesAssignment 4Dinesh Jangid0% (1)
- DSP QBDocument7 pagesDSP QBRoopa Nayak100% (1)
- Euree 701Document2 pagesEuree 701swaroop0309Pas encore d'évaluation
- DSP QBDocument4 pagesDSP QBakhila pemmarajuPas encore d'évaluation
- Reg. No: B.Tech. Degree Examination, June 2011: (For The Candidates Admitted From The Academic Year 2007-2008 Onwards)Document3 pagesReg. No: B.Tech. Degree Examination, June 2011: (For The Candidates Admitted From The Academic Year 2007-2008 Onwards)abhinavch26Pas encore d'évaluation
- DSP Lab QP 12 Final ExamDocument11 pagesDSP Lab QP 12 Final ExamAdarsh AmruthPas encore d'évaluation
- r05320201 Digital Signal ProcessingDocument8 pagesr05320201 Digital Signal ProcessingSRINIVASA RAO GANTAPas encore d'évaluation
- DSP Question Paper Code 53123Document3 pagesDSP Question Paper Code 53123DhariniJeevanandamPas encore d'évaluation
- BE 2008 Electronics&Telecommunication PDFDocument71 pagesBE 2008 Electronics&Telecommunication PDFcontrasterPas encore d'évaluation
- Semester: IV Year: II: Digital Signal ProcessingDocument5 pagesSemester: IV Year: II: Digital Signal ProcessingShipra ChoudharyPas encore d'évaluation
- Cockrum Fall 2008 Final PaperDocument15 pagesCockrum Fall 2008 Final Papernayeem4444Pas encore d'évaluation
- Question Paper Code:: Reg. No.Document2 pagesQuestion Paper Code:: Reg. No.Naveen KumarPas encore d'évaluation
- BM2305 DSPDocument2 pagesBM2305 DSPmanojniranjPas encore d'évaluation
- An FPGA-Based Digital Modulation Signal Generator With Fading Channel EmulationDocument5 pagesAn FPGA-Based Digital Modulation Signal Generator With Fading Channel Emulationsenao71263Pas encore d'évaluation
- Digital Signal Processing Question BankDocument6 pagesDigital Signal Processing Question BankTim LeePas encore d'évaluation
- FPGA Implementation of High Speed FIR Filters Using Add and Shift MethodDocument6 pagesFPGA Implementation of High Speed FIR Filters Using Add and Shift Methodpramani90Pas encore d'évaluation
- EECT6306 Miidterm Project Harshit VamshiDocument13 pagesEECT6306 Miidterm Project Harshit Vamshiafrica threePas encore d'évaluation
- VIGNAN ECE QUESTION BANKDocument15 pagesVIGNAN ECE QUESTION BANKAdnan Zahid67% (3)
- 9D38103 Advanced Digital Signal Processing4Document1 page9D38103 Advanced Digital Signal Processing4Mahaboob SubahanPas encore d'évaluation
- DSP Integrated Circuits 3Document3 pagesDSP Integrated Circuits 3brindkowsiPas encore d'évaluation
- nr320402 Digital Signal ProcessingDocument2 pagesnr320402 Digital Signal ProcessingSRINIVASA RAO GANTAPas encore d'évaluation
- DSP Model QuestionDocument4 pagesDSP Model QuestionSomnath KhamaruPas encore d'évaluation
- RK4 MethodDocument6 pagesRK4 MethodfurqanhamidPas encore d'évaluation
- PART A (10 X 2 20 Marks)Document5 pagesPART A (10 X 2 20 Marks)dhakaruPas encore d'évaluation
- Sokoine University of Agriculture: Office of The Deputy Vice Chancellor (Academic)Document1 pageSokoine University of Agriculture: Office of The Deputy Vice Chancellor (Academic)Emmanuel Aron JoshuaPas encore d'évaluation
- Utumishi - Governtment Directory 2012 FinalDocument318 pagesUtumishi - Governtment Directory 2012 FinalEmmanuel Aron Joshua80% (30)
- Emmanuel Joshua Beng11CoDocument6 pagesEmmanuel Joshua Beng11CoEmmanuel Aron JoshuaPas encore d'évaluation
- ComputerGraphics PDFDocument54 pagesComputerGraphics PDFEmmanuel Aron JoshuaPas encore d'évaluation
- C 6Document72 pagesC 6Emmanuel Aron JoshuaPas encore d'évaluation
- The Dar Es Salaam Institute of TechnologyDocument2 pagesThe Dar Es Salaam Institute of TechnologyEmmanuel Aron JoshuaPas encore d'évaluation
- Dit Academic Calendar 2013-2014Document6 pagesDit Academic Calendar 2013-2014Emmanuel Aron JoshuaPas encore d'évaluation
- Computer Graphics PDFDocument39 pagesComputer Graphics PDFEmmanuel Aron JoshuaPas encore d'évaluation
- Emmanuel JoshuaDocument2 pagesEmmanuel JoshuaEmmanuel Aron JoshuaPas encore d'évaluation
- The Dar Es Salaam Institute of TechnologyDocument2 pagesThe Dar Es Salaam Institute of TechnologyEmmanuel Aron JoshuaPas encore d'évaluation
- Vodacom Primier League 2013Document1 pageVodacom Primier League 2013Emmanuel Aron JoshuaPas encore d'évaluation
- The Circuit On The Left Side of PIC Is Its Basic CircuitDocument3 pagesThe Circuit On The Left Side of PIC Is Its Basic CircuitEmmanuel Aron JoshuaPas encore d'évaluation
- INFO 415 Quiz1 – Systems AnalysisDocument9 pagesINFO 415 Quiz1 – Systems AnalysisAshley Portega100% (2)
- Appears in KDD 2007. © ACM, 2007.Document9 pagesAppears in KDD 2007. © ACM, 2007.api-25987892Pas encore d'évaluation
- Multimedia Application and Production Review Questions and AnswersDocument6 pagesMultimedia Application and Production Review Questions and AnswersEmmanuel Aron JoshuaPas encore d'évaluation
- INFO 415 Quiz1 – Systems AnalysisDocument9 pagesINFO 415 Quiz1 – Systems AnalysisAshley Portega100% (2)
- Chapter 5 Refraction Through A Lens - Concise Physics Part II - Selina Solutions For Class 10 Physics ICSE - TopperLearningDocument71 pagesChapter 5 Refraction Through A Lens - Concise Physics Part II - Selina Solutions For Class 10 Physics ICSE - TopperLearningHarsh AhirwarPas encore d'évaluation
- 5367227Document2 pages5367227aliha100% (1)
- Unit Vi: Classification and PredictionDocument29 pagesUnit Vi: Classification and PredictionpalaniappanPas encore d'évaluation
- Stresses in Deep Beams Analyzed Using Finite Difference MethodDocument122 pagesStresses in Deep Beams Analyzed Using Finite Difference Methodakash kumarPas encore d'évaluation
- Practice Paper 1 Biology: WWW - Oxfordsecodary.co - UkDocument11 pagesPractice Paper 1 Biology: WWW - Oxfordsecodary.co - UkOHPas encore d'évaluation
- LRFD Design ExampleDocument698 pagesLRFD Design ExampleCesar RomeroPas encore d'évaluation
- A e Regulator GuideDocument1 pageA e Regulator Guidenasser4858Pas encore d'évaluation
- Brushless DC Motor Control Using PLCDocument6 pagesBrushless DC Motor Control Using PLCvuluyen6688Pas encore d'évaluation
- Periodic TableDocument1 pagePeriodic TableChemist MookaPas encore d'évaluation
- Charger Energic Plus (Catalog)Document24 pagesCharger Energic Plus (Catalog)sugar44Pas encore d'évaluation
- Mech Vi Non Traditional Machining (10me665) NotesDocument45 pagesMech Vi Non Traditional Machining (10me665) Notesnikhil0% (1)
- LP Galvo Scanner LaserphotoDocument16 pagesLP Galvo Scanner LaserphotoCostin DinamaxPas encore d'évaluation
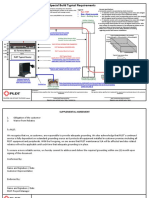
- Special Build Typical Requirements (Rev1) PDFDocument2 pagesSpecial Build Typical Requirements (Rev1) PDFToper CdjPas encore d'évaluation
- Mathematics T (954/1) Functions QuizDocument1 pageMathematics T (954/1) Functions QuizmasyatiPas encore d'évaluation
- Hysys For Aspen Plus Users PDFDocument11 pagesHysys For Aspen Plus Users PDFKarim KholeifPas encore d'évaluation
- Measure Runoff and Soil Loss at Erosion Plots in TanzaniaDocument19 pagesMeasure Runoff and Soil Loss at Erosion Plots in TanzaniaMohd Sofiyan Bin SulaimanPas encore d'évaluation
- 10.8 Special Polar GraphsDocument16 pages10.8 Special Polar GraphsIlias NihaPas encore d'évaluation
- WWW Mathworks inDocument7 pagesWWW Mathworks inRagini SharmaPas encore d'évaluation
- Monico Gen. 2 Gateway Datasheet PDFDocument2 pagesMonico Gen. 2 Gateway Datasheet PDFRicardo OyarzunPas encore d'évaluation
- A2 Biopharm MetalDocument28 pagesA2 Biopharm MetalThanh Nghị BùiPas encore d'évaluation
- openPDC DM-Tools Usage Examples GuideDocument5 pagesopenPDC DM-Tools Usage Examples GuidealantmurrayPas encore d'évaluation
- Lee Et Al-1998-AIChE JournalDocument10 pagesLee Et Al-1998-AIChE JournalNoUrElhOdaPas encore d'évaluation
- TG SkripsiDocument138 pagesTG SkripsiYudanto SetyoPas encore d'évaluation
- Definition, Scope and Nature of EconomicsDocument29 pagesDefinition, Scope and Nature of EconomicsShyam Sunder BudhwarPas encore d'évaluation
- Introduction to Nautilus 8 Mold Qualification and Design of Experiments SoftwareDocument66 pagesIntroduction to Nautilus 8 Mold Qualification and Design of Experiments SoftwareJohn SuperdetallePas encore d'évaluation
- Drive Fundamentals and DC Motor CharacteristicsDocument6 pagesDrive Fundamentals and DC Motor CharacteristicsKawooya CharlesPas encore d'évaluation
- Pavan Kumar 1Document8 pagesPavan Kumar 1Anji ChPas encore d'évaluation
- Sabp G 007Document8 pagesSabp G 007Li PengPas encore d'évaluation
- Calcs HETPDocument50 pagesCalcs HETPChemEngGirl89Pas encore d'évaluation
- ECI Symposium Proceedings Optimizes Fouling Mitigation DesignDocument6 pagesECI Symposium Proceedings Optimizes Fouling Mitigation DesignJoseAndresCarreñoPas encore d'évaluation
- The Fabric of Civilization: How Textiles Made the WorldD'EverandThe Fabric of Civilization: How Textiles Made the WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (57)
- Sully: The Untold Story Behind the Miracle on the HudsonD'EverandSully: The Untold Story Behind the Miracle on the HudsonÉvaluation : 4 sur 5 étoiles4/5 (103)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureD'EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureÉvaluation : 5 sur 5 étoiles5/5 (124)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestD'EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestÉvaluation : 4 sur 5 étoiles4/5 (28)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesD'EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesPas encore d'évaluation
- Pale Blue Dot: A Vision of the Human Future in SpaceD'EverandPale Blue Dot: A Vision of the Human Future in SpaceÉvaluation : 4.5 sur 5 étoiles4.5/5 (586)
- Highest Duty: My Search for What Really MattersD'EverandHighest Duty: My Search for What Really MattersPas encore d'évaluation
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaD'EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaPas encore d'évaluation
- The Weather Machine: A Journey Inside the ForecastD'EverandThe Weather Machine: A Journey Inside the ForecastÉvaluation : 3.5 sur 5 étoiles3.5/5 (31)
- Transformed: Moving to the Product Operating ModelD'EverandTransformed: Moving to the Product Operating ModelÉvaluation : 4 sur 5 étoiles4/5 (1)
- A Place of My Own: The Architecture of DaydreamsD'EverandA Place of My Own: The Architecture of DaydreamsÉvaluation : 4 sur 5 étoiles4/5 (241)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980D'Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Évaluation : 4 sur 5 étoiles4/5 (21)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsD'EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsPas encore d'évaluation
- Packing for Mars: The Curious Science of Life in the VoidD'EverandPacking for Mars: The Curious Science of Life in the VoidÉvaluation : 4 sur 5 étoiles4/5 (1395)
- The Future of Geography: How the Competition in Space Will Change Our WorldD'EverandThe Future of Geography: How the Competition in Space Will Change Our WorldÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationD'EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationÉvaluation : 4.5 sur 5 étoiles4.5/5 (46)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseD'EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseÉvaluation : 4.5 sur 5 étoiles4.5/5 (50)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseD'EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseÉvaluation : 3.5 sur 5 étoiles3.5/5 (12)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterD'EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterÉvaluation : 5 sur 5 étoiles5/5 (3)
- A Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsD'EverandA Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsPas encore d'évaluation
- Mental Math for Pilots: A Study GuideD'EverandMental Math for Pilots: A Study GuideÉvaluation : 0.5 sur 5 étoiles0.5/5 (1)
- The End of Craving: Recovering the Lost Wisdom of Eating WellD'EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellÉvaluation : 4.5 sur 5 étoiles4.5/5 (80)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindD'EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindPas encore d'évaluation
- Artificial Intelligence: A Guide for Thinking HumansD'EverandArtificial Intelligence: A Guide for Thinking HumansÉvaluation : 4.5 sur 5 étoiles4.5/5 (30)
- Reality+: Virtual Worlds and the Problems of PhilosophyD'EverandReality+: Virtual Worlds and the Problems of PhilosophyÉvaluation : 4 sur 5 étoiles4/5 (24)


















![Ece-Vii-dsp Algorithms & Architecture [10ec751]-Solution[1]](https://imgv2-2-f.scribdassets.com/img/document/723876327/149x198/8f235d6545/1713342076?v=1)