Vous aimerez peut-être aussi
- Active-HDL Tutorial for Creating Basic SchematicsDocument17 pagesActive-HDL Tutorial for Creating Basic SchematicsSushil KumarPas encore d'évaluation
- Active-HDL Tutorial 0 - Introduction To Active-HDLDocument29 pagesActive-HDL Tutorial 0 - Introduction To Active-HDLSarthak Dilip LadPas encore d'évaluation
- Techdocs AltiumDocument95 pagesTechdocs AltiumTong AlanPas encore d'évaluation
- Quartus Tutorial 2 Simulation PDFDocument25 pagesQuartus Tutorial 2 Simulation PDFBill GonzálezPas encore d'évaluation
- Tutorial: Working With The Xilinx Tools 14.4: Part I: Setting Up A New ProjectDocument18 pagesTutorial: Working With The Xilinx Tools 14.4: Part I: Setting Up A New ProjectSmart ClassePas encore d'évaluation
- Drawing Sketches For Solid Models: Learning ObjectivesDocument42 pagesDrawing Sketches For Solid Models: Learning ObjectivesAgus PrijantoPas encore d'évaluation
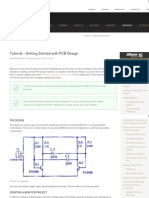
- Tutorial - Getting Started With PCB Design: Modified by Phil Loughhead On 28-Apr-2016Document123 pagesTutorial - Getting Started With PCB Design: Modified by Phil Loughhead On 28-Apr-2016anilPas encore d'évaluation
- ADOH Tutorial GettingStartedwithPCBDesign 110114 1356 41300Document55 pagesADOH Tutorial GettingStartedwithPCBDesign 110114 1356 41300Gheliuc FlorinPas encore d'évaluation
- Orcad Capture and PspiceDocument25 pagesOrcad Capture and PspiceabhinandPas encore d'évaluation
- Drawing Electronic SchematicsDocument8 pagesDrawing Electronic Schematicswinter sonataPas encore d'évaluation
- PSCAD Training 4Document47 pagesPSCAD Training 4usefi100% (1)
- ECE428 Xilinx ISE Tutorial: Haibo Wang Southern Illinois University CarbondaleDocument10 pagesECE428 Xilinx ISE Tutorial: Haibo Wang Southern Illinois University Carbondaleblackwhite_1005798100% (1)
- PCB ManualDocument56 pagesPCB ManualJigar PatelPas encore d'évaluation
- Circuit Board DesignDocument56 pagesCircuit Board DesignducaadinaPas encore d'évaluation
- Introduction to OrCAD Capture and PSpice simulationDocument28 pagesIntroduction to OrCAD Capture and PSpice simulationFedel AliPas encore d'évaluation
- PCBDocument18 pagesPCBHenrik PedersenPas encore d'évaluation
- Revit Mep StepsDocument14 pagesRevit Mep Stepsrudi prasetyoPas encore d'évaluation
- 01 - Lab - 1- Mô phỏng ADSDocument19 pages01 - Lab - 1- Mô phỏng ADSNguyễn Ngọc TháiPas encore d'évaluation
- Getting Started With Altera Quartus IIDocument18 pagesGetting Started With Altera Quartus IIAndres Ccolque SandiPas encore d'évaluation
- QuartusII TutorialDocument9 pagesQuartusII TutorialPNGNoob , Commander Of NoobsPas encore d'évaluation
- Creating A MasterDocument100 pagesCreating A MasterFarhan AshrafPas encore d'évaluation
- Starting a New Project in PSoC CreatorDocument5 pagesStarting a New Project in PSoC CreatorDidit Setyo PamujiPas encore d'évaluation
- LAB 6 - INTRODUCTION TO PCB (1) (2) EcadDocument15 pagesLAB 6 - INTRODUCTION TO PCB (1) (2) EcadMuhd FaizPas encore d'évaluation
- Kolej Kemahiran Tinggi MARA Pasir Mas, Kelantan.: Job SheetDocument9 pagesKolej Kemahiran Tinggi MARA Pasir Mas, Kelantan.: Job SheetSue AzizPas encore d'évaluation
- Tutorial - 1 - Introduction To Active HDL - Creating and Simulating Simple SchematicsDocument30 pagesTutorial - 1 - Introduction To Active HDL - Creating and Simulating Simple SchematicsFranco AguilarPas encore d'évaluation
- Getting Started With PCB Design PDFDocument34 pagesGetting Started With PCB Design PDFxuanvan1303Pas encore d'évaluation
- Quartus Tutorial EECE 2317Document12 pagesQuartus Tutorial EECE 2317Amir ZuhniPas encore d'évaluation
- Developing PCBs in PADS LayoutDocument12 pagesDeveloping PCBs in PADS LayoutthanhhavdtPas encore d'évaluation
- KiCad Mini Tutorial Covers Schematic Entry and PCB DesignDocument13 pagesKiCad Mini Tutorial Covers Schematic Entry and PCB DesignLuís GarciaPas encore d'évaluation
- Virtuoso Layout Design OverviewDocument20 pagesVirtuoso Layout Design OverviewMasud SarkerPas encore d'évaluation
- Piping-PDMS HandBook - DIAINCH ReportDocument13 pagesPiping-PDMS HandBook - DIAINCH ReportTulsi Garapati100% (1)
- Xilinx ISE 10.1 TutorialsDocument20 pagesXilinx ISE 10.1 Tutorialssareluis30Pas encore d'évaluation
- AutoCAD Land Desktop TutorialDocument29 pagesAutoCAD Land Desktop Tutorialrudylesmana0% (1)
- Verilog Entry and Simulation TutorialDocument45 pagesVerilog Entry and Simulation TutorialKhadar BashaPas encore d'évaluation
- LPKF E44 PCB Mill Getting Started Guide: Student Workshop KTH Simon Carlsson, Emil BergvallDocument21 pagesLPKF E44 PCB Mill Getting Started Guide: Student Workshop KTH Simon Carlsson, Emil BergvallTales AugustoPas encore d'évaluation
- Tutorial 4: Accessing Databases Using The Dataenvironment ControllDocument11 pagesTutorial 4: Accessing Databases Using The Dataenvironment ControllPANKAJ100% (1)
- Keysight ADS Example Book CH 01 - Getting Started With ADS 5992-1309Document7 pagesKeysight ADS Example Book CH 01 - Getting Started With ADS 5992-1309jumper_bonesPas encore d'évaluation
- Mplab IDE TutorialDocument12 pagesMplab IDE Tutorialahsoopk100% (1)
- User Guide - Using Mentor Graphics Design KitDocument43 pagesUser Guide - Using Mentor Graphics Design Kitvishvakirana100% (1)
- Using Picaxe Create Within Designspark PCBDocument7 pagesUsing Picaxe Create Within Designspark PCBFrancisco Coayo MatosPas encore d'évaluation
- Starting A New Schematic ProjectDocument8 pagesStarting A New Schematic ProjectPavan SaiPas encore d'évaluation
- Cadence Tut1Document17 pagesCadence Tut1Raffi SkPas encore d'évaluation
- Getting Started Guide For Creating A Struts Application - Exadel Studio 2.5Document11 pagesGetting Started Guide For Creating A Struts Application - Exadel Studio 2.5api-25930603Pas encore d'évaluation
- Xilinx ISE Step-by-Step TutorialDocument12 pagesXilinx ISE Step-by-Step TutorialAjay SharmaPas encore d'évaluation
- Kolej Kemahiran Tinggi MARA Pasir Mas, Kelantan.: Job SheetDocument9 pagesKolej Kemahiran Tinggi MARA Pasir Mas, Kelantan.: Job SheetSue AzizPas encore d'évaluation
- OrCAD9.2Suite Starttofinish 62Document62 pagesOrCAD9.2Suite Starttofinish 621980shoaib3961Pas encore d'évaluation
- Diptrace TutorialDocument138 pagesDiptrace TutorialJose GutiPas encore d'évaluation
- Active-HDL Quick Start GuideDocument14 pagesActive-HDL Quick Start Guideom007Pas encore d'évaluation
- Forms Maestro DetalleDocument100 pagesForms Maestro DetallemickPas encore d'évaluation
- OrCad TutorialDocument62 pagesOrCad Tutorialng_viet_cuong_groupPas encore d'évaluation
- PCB Layout TaskkkDocument11 pagesPCB Layout TaskkkDulshan DulshannPas encore d'évaluation
- PCB Layout DesignDocument5 pagesPCB Layout DesignhvrkPas encore d'évaluation
- C# For Beginners: An Introduction to C# Programming with Tutorials and Hands-On ExamplesD'EverandC# For Beginners: An Introduction to C# Programming with Tutorials and Hands-On ExamplesPas encore d'évaluation
- Six Months Industrial TrainingDocument16 pagesSix Months Industrial TrainingPrince AlenPas encore d'évaluation
- Training Report on Embedded Systems and AVR MicrocontrollersDocument39 pagesTraining Report on Embedded Systems and AVR MicrocontrollersPawan KumawatPas encore d'évaluation
- Interfacing LEDs on P0.10 to P0.13 and P0.18 to P0.21Document2 pagesInterfacing LEDs on P0.10 to P0.13 and P0.18 to P0.21Prince AlenPas encore d'évaluation
- Project ReportDocument19 pagesProject ReportPrince AlenPas encore d'évaluation
- Embedded SystemsDocument69 pagesEmbedded SystemsPrince AlenPas encore d'évaluation
- Radar PrinciplesDocument47 pagesRadar PrinciplesPrince AlenPas encore d'évaluation
- Speed Checker For HighwaysDocument22 pagesSpeed Checker For Highwaysbariq92raza100% (1)
- Speed Checker For Highways: THURSDAY, JULY 15, 2010Document5 pagesSpeed Checker For Highways: THURSDAY, JULY 15, 2010Prince AlenPas encore d'évaluation
- Upgrading a Quad 303 amp with a NET Audio PSU board in under 40 stepsDocument1 pageUpgrading a Quad 303 amp with a NET Audio PSU board in under 40 stepsragleta1406Pas encore d'évaluation
- Session 1Document21 pagesSession 1kavitaPas encore d'évaluation
- (IIT Guwahati) VLSI Design Verification and TestDocument4 pages(IIT Guwahati) VLSI Design Verification and Testjitu_4Pas encore d'évaluation
- Description Features: PT6961 LED Driver ICDocument18 pagesDescription Features: PT6961 LED Driver ICDhivya NPas encore d'évaluation
- Low Power VLSI Circuits & Systems Design TechniquesDocument1 pageLow Power VLSI Circuits & Systems Design TechniquesMALLAVARAPU NARASAREDDYPas encore d'évaluation
- Microprocessor Basics and Related TermsDocument27 pagesMicroprocessor Basics and Related TermsJai Sai RamPas encore d'évaluation
- Cs2100 7 Other Building BlocksDocument83 pagesCs2100 7 Other Building BlocksamandaPas encore d'évaluation
- BLTouch - Auto Bed Leveling Sensor for 3D PrintersDocument5 pagesBLTouch - Auto Bed Leveling Sensor for 3D PrintersMarcosFenollarPas encore d'évaluation
- Microcomputer Components: 8-Bit CMOS Single-Chip MicrocontrollerDocument62 pagesMicrocomputer Components: 8-Bit CMOS Single-Chip MicrocontrollerJose CPas encore d'évaluation
- Inside the System: Unit on Memory and ProcessingDocument1 pageInside the System: Unit on Memory and ProcessingRonaldo Francisco Cueva AzañeroPas encore d'évaluation
- SPICE Simulation: Chang Gung UniversityDocument34 pagesSPICE Simulation: Chang Gung UniversityJagadeesh AkuratiPas encore d'évaluation
- W13L18 - Real Time System Design - 1Document29 pagesW13L18 - Real Time System Design - 1Faqeed Haider AliPas encore d'évaluation
- ARM Assembly Language and AMBADocument36 pagesARM Assembly Language and AMBASujitJoshieePas encore d'évaluation
- Verilog Code For AluDocument7 pagesVerilog Code For Alumeaow88100% (3)
- Computer Represent Data:: Binary Number Bits and Bytes Text CodesDocument2 pagesComputer Represent Data:: Binary Number Bits and Bytes Text CodesFull StudyPas encore d'évaluation
- IC Tester Part 2Document6 pagesIC Tester Part 21Pas encore d'évaluation
- Microcontroller - Wikipedia..Document7 pagesMicrocontroller - Wikipedia..452bobPas encore d'évaluation
- Service Manual: SharpDocument21 pagesService Manual: SharpMarco MinottiPas encore d'évaluation
- Embedded Processor: Unit IIDocument50 pagesEmbedded Processor: Unit IIgudduPas encore d'évaluation
- MuxDocument4 pagesMuxShailesh WagholePas encore d'évaluation
- Verilog Bhaskar .JDocument230 pagesVerilog Bhaskar .JSuraj GhalePas encore d'évaluation
- Car Amplifier Roadstar Am-320Document9 pagesCar Amplifier Roadstar Am-320Félix Takey KobataPas encore d'évaluation
- Shift RegistersDocument31 pagesShift RegistersSAJIN KARMACHARYAPas encore d'évaluation
- SMD Malzeme Katalogları PDFDocument123 pagesSMD Malzeme Katalogları PDFGöker BüyükgönençPas encore d'évaluation
- Helm PCB - 8088 ComputerDocument9 pagesHelm PCB - 8088 ComputerGabriela FrederickPas encore d'évaluation
- An Overview of 3D Integrated Circuits: Vachan Kumar Azad NaeemiDocument3 pagesAn Overview of 3D Integrated Circuits: Vachan Kumar Azad NaeemiMeghanand KumarPas encore d'évaluation
- Interview QuesDocument12 pagesInterview Quesvlsi_asicPas encore d'évaluation
- 8051Document36 pages8051Jay MjPas encore d'évaluation
- TTL Three-State Logic Probe CircuitDocument1 pageTTL Three-State Logic Probe Circuitalefabi2006Pas encore d'évaluation
- ATmega328P DatasheetDocument567 pagesATmega328P Datasheetbmwguy20Pas encore d'évaluation