Académique Documents
Professionnel Documents
Culture Documents
Cap 2
Transféré par
Nuno Fmlg NunesTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cap 2
Transféré par
Nuno Fmlg NunesDroits d'auteur :
Formats disponibles
Captulo 2
Solu cao numerica de equa c oes e
sistemas nao lineares
2.1 Breve referencia hist orica
A origem dos metodos numericos para a resolu c ao de equa c oes n ao lineares e bastante antiga.
Os matem aticos gregos tinham j a notado a import ancia do conhecimento da rela c ao entre a
corda de uma circunferencia e o arco que ela dene. Hiparcos de Niceia, no seculo II a.C., foi
provavelmente o primeiro a introduzir a fun c ao corda
cor (2) = 2Rsin ,
onde R e o raio da circunferencia e o angulo subentendido.
No entanto, o primeiro matem atico a tabelar esta fun c ao foi Ptolomeu (100-178), no seu
Almagest, onde tambem calculou f ormulas para cor(
1
+
2
) e cor(
1
2
). O que e interessante
notar e que Ptolomeu para calcular cor(1
o
) usou um procedimento iterativo onde obtinha
sucessivas aproxima c oes, partindo de v arios valores iniciais.
O problema de melhorar o metodo de Ptolomeu preocupou muitos matem aticos, em parti-
cular os do mundo arabe, ate ao tempo de al-Kashi (sec. XV). Este matem atico (e astr onomo)
deduziu um elegante metodo iterativo que envolvia equa c oes algebricas e que, em particular,
permitia calcular o valor de sin 1
o
partindo de sin 3
o
. Este problema, conhecido por trissec c ao
do angulo, constiui um dos problemas mais famosos da hist oria da Matem atica e, em particular
das equa c oes algebricas.
O conceito de equa c ao algebrica tinha sido introduzido no sec. IX pelo matem atico arabe
Mohammed ibn Musa al-Khowarismi (780-850) na obra Ilm al-Jabr wai Muquabalah. Nesta
obra eram explicadas, essencialmente, duas opera c oes: al-jabr e a opera c ao que consiste em
fazer passar de um membro da equa c ao para o outro um termo subtractivo por forma a o
tornar aditivo; al-muquabalah e a opera c ao que consiste em suprimir os termos identicos em
ambos os membros da equa c ao. O nome de al-Kowarismi deu origem ` a palavra portuguesa
algarismo e deve-se ao facto de ter sido a obra deste matem atico que deu a conhecer ao
ocidente a numera c ao hindu- arabe. Outro matem atico-l osofo de destaque no contexto das
equa c oes alebricas foi o famoso Omar Khayyam (1048-1131), da Persia, autor da celebre obra
Odes ao Vinho.
A nota c ao era, no entanto, bastante deciente. Importantes contributos no sentido da
simplica c ao da nota c ao foram dados por Leonardo de Pisa (Fibonacci) (1170?-1250?) no
13
Solu c ao numerica de equa c oes e sistemas n ao lineares 14
seculo XIII, Luca de Pacioli (1445?-1517) no seculo XV, Christoph Rudolf (matem atico alem ao
que introduziu os smbolos + e ) e Robert Recorde (1510?-1558) (matem atico ingles que
introduziu o smbolo =) no seculo XVI e, sobretudo, por Fran cois Vi`ete (1540-1603), ou ` a
latina como ele preferia, Vieta, nos nais do seculo XVI.
Ap os os trabalhos de John Napier (1550-1617) e de Henry Briggs (1556-1630) sobre lo-
garitmos, Vieta desenvolveu, em 1595, um esquema iterativo para calcular um zero de um
polin omio de grau 45, problema que tinha sido proposto a todos os matem aticos do mundo
por Adrianus Romanus (o verdadeiro nome deste matem atico era Adriaan von Roomen mas
tambem preferiu o nome latino; manias da Renascen ca...). Vieta n ao s o calculou de uma forma
brilhante um zero como tambem apresentou os 23 zeros positivos do referido polin omio!
1
E
curioso reparar que, em 1670, o metodo de Vieta foi descrito como um trabalho impr oprio
para um crist ao e mais adequado a alguem que queira comprometer-se a remover os Alpes
italianos para a Inglaterra.
Durante este perodo muitos matem aticos se dedicaram ` a tarefa de deduzir metodos ite-
rativos. Por exemplo, nos meados do sec. XVII, Johannes Kepler (1571-1630) produziu um
esquema iterativo para resolver a famosa equa c ao
= + e sin ,
onde e fun c ao de a que chamou regula rositionum. Na segunda metade desse seculo, a
Matem atica na Europa ocidental sofreu uma enorme evolu c ao.
E de salientar, nesta epoca,
as novas teorias e nota c oes apresentadas por Rene Descartes (1596-1650) em La Geometrie
bem como os trabalhos do seu grande rival intelectual Pierre Fermat (1601-1665).
Precedido por este conjunto de resultados, o grande matem atico inges Isaac Newton
(1643-1727) publicou, em 1669 no seu celebre trabalho Principia Mathematica (Livro 1,
Prop.31,Scholium), uma vers ao melhorada do procedimento exposto por Vieta e melhorado
por Oughtred para calcular a solu c ao de x
3
2x 5 = 0. Este esquema, que ele tambem
usaria para resolver o problema de Kepler, pode ser representado por
x
k+1
= x
k
f(x
k
)
f
(x
k
)
, k = 0, 1, . . . ,
e constitui um poderoso e simples metodo para calcular razes de equa c oes n ao lineares. Este
metodo e muitas vezes designado por metodo de Newton-Raphson pois ele foi sistematica-
mente estudado por Joseph Raphson (?-1715?) num trabalho que publicou em 1690. Devido
aos seus excelentes trabalhos, neste e noutros campos, Newton e considerado como um dos
grandes precursores da an alise numerica.
2.2 Introdu cao
A solu c ao de equa c oes e sistemas de equa c oes e um captulo em que a an alise numerica
encontra uma solu c ao bastante precisa. Neste captulo vamos expor alguns metodos que nos
permitem obter uma aproxima c ao da solu c ao real de uma equa c ao real da forma
f(x) = 0, (2.1)
1
Vieta, que possuia um profundo conhecimento matem atico, serviu-se para o seu estudo de v arias simpli-
ca c oes de nota c ao que introduziu, nomeadamente, a de usar letras n ao s o para denotar constantes como para
denotar vari aveis; as primeiras letras do alfabeto seriam reservadas para as constantes e as ultimas para as
vari aveis.
Solu c ao numerica de equa c oes e sistemas n ao lineares 15
onde f pode ser algebrica ou transcendente.
Os valores de x
tais que f(x
) = 0 s ao designados por zeros de f, ou razes de f(x) = 0.
S o para algumas escolhas particulares de f e que s ao conhecidos processos que permitem
calcular os referidos valores com um n umero nito de opera c oes.
Exemplo 2.1 As razes da equa cao do segundo grau
ax
2
+ bx + c = 0
sao facilmente obtidas pela chamada f ormula resolvente
x =
b
b
2
4ac
2a
, a ,= 0.
Exemplo 2.2 As razes da equa cao
x
3
+ px
2
+ qx + r = 0
podem ser obtidas pelo processo que se segue, devido a Scipione del Ferro (1465-1515) e Niccolo
Tartaglia (1499-1557). Fazendo a mudan ca de variavel x = z
p
3
obtem-se assim a equa cao
z
3
+ az + b = 0,
onde
a =
1
3
(3q p
2
) e b =
1
27
(2p
3
9pq + 27r).
As razes desta nova equa cao sao dadas por
z
1
= A + B; z
2
=
A + B
2
+
AB
2
3; z
3
=
A + B
2
AB
2
3,
onde
A =
3
_
b
2
+
b
2
4
+
a
3
27
,
B =
3
_
b
2
b
2
4
+
a
3
27
.
Assim as razes da equa cao dada sao
x
1
= z
1
p
3
; x
2
= z
2
p
3
; x
3
= z
3
p
3
.
E tambem possvel determinar analiticamente as razes de uma equa c ao polinomial de
quarta ordem. Tal f ormula e devida a Ludovico Ferrari (1522-1569). A f ormula para calcular
as razes de uma equa c ao polinomial de quinta ordem foi procurada durante seculos; em
1826, o matem atico noruegues Niels Henrik Abel (1802-1829) provou que essa f ormula n ao
existe. Assim, para calcular as razes de uma equa c ao polinomial de grau igual ou superior a
cinco temos que recorrer a metodos numericos. Alem disso, de um modo geral, n ao existem
f ormulas para a determina c ao das razes de uma equa c ao n ao linear n ao polinomial.
E o caso
de considerarmos, por exemplo,
e
x
+ tan x + log x = 0.
Solu c ao numerica de equa c oes e sistemas n ao lineares 16
A solu c ao analtica de sistemas de equa c oes n ao lineares tambem n ao e possvel de obter na
maioria dos caso. Como exemplo, considere-se
_
x
2
y + 2xy
2
xy = 3
xy
2
2x
2
y + 4xy = 1
.
Problemas numericos desta natureza ocorrem com muita frequencia na resolu c ao de equa-
c oes diferenciais, integra c ao, determina c ao de extremos, etc. Na impossibilidade de obter a
sua solu c ao exacta, vamos considerar os chamados metodos iterativos por forma a obter uma
solu c ao aproximada para o problema.
2.3 Metodos iterativos
Consideremos o problema (2.1). A losoa dos metodos iterativos consiste em, partindo de
uma aproxima c ao inicial x
0
para uma solu c ao x
do problema, gerar uma sucess ao de valores
x
k+1
= g(x
k
), k = 0, 1, 2, . . . , (2.2)
que seja convergente para essa solu c ao.
Deni cao 2.3 O metodo iterativo (2.2) diz-se convergente para x
se
lim
k
e
k
= 0,
onde e
k
:= x
k
= x
x
k
e o erro (absoluto) da itera c ao k.
Dados v arios processos iterativos convergentes para para a solu c ao x
de (2.1) coloca-se a
quest ao de saber qual dos processos e mais eciente. A eciencia de um processo iterativo pode
ser medida de v arias maneiras: esfor co computacional, tempo gasto, etc. Nesta sec c ao iremos
denir um conceito que servir a para medir a velocidade de convergencia de um determinado
processo iterativo.
Deni cao 2.4 Uma sucess ao de itera c oes x
k
diz-se que converge com ordem de convergen-
cia p 1 para um ponto x
se existir uma constante M > 0, independente de k, e uma ordem
k
0
IN a partir da qual
[e
k+1
[ M[e
k
[
p
, (2.3)
A constante M e chamada constante erro.
A velocidade de convergencia de um processo iterativo est a usualmente associada ao con-
ceito de ordem de convergencia. Quanto maior for a ordem de convergencia mais r apida e,
em geral, a velocidade de convergencia do processo. A raz ao de convergencia tambem pode
ser um aspecto a considerar mas, normalmente, s o e considerada quando se comparam pro-
cessos iterativos com a mesma ordem de convergencia. Aqui, quanto menor for a raz ao de
convergencia mais r apida e a convergencia do processo.
Observa cao 2.5 Se p = 1 diz-se que o metodo iterativo converge linearmente para x
. Neste
caso a constante erro M ter a que ser inferior a 1 (para o metodo convergir) e a rela c ao (2.3)
pode ser escrita na forma
[e
k+1
[ M
k+1
[e
0
[.
Se p = 2 diz-se que a convergencia e quadratica.
Solu c ao numerica de equa c oes e sistemas n ao lineares 17
Outras quest oes que surgem naturalmente quando se fala de metodos iterativos s ao as
seguintes.
Como determinar a aproxima c ao inicial?
Como denir um metodo iterativo convergente?
Como saber que a solu c ao dada pelo metodo iterativo constitui uma boa aproxima c ao
para a solu c ao exacta, isto e, como parar o processo iterativo?
As duas primeiras quest oes ser ao respondidas nas pr oximas sec c oes. Consideremos, por
agora, apenas o problema da deni c ao de criterios de paragem para processos iterativos
aplicados ao c alculo das razes de (2.1).
Seja (2.2) o processo iterativo gerador de uma sucess ao de aproxima c oes convergente para
a solu c ao x
de (2.1). Os criterios de paragem mais frequentes, quando se pretende aproximar
a raz x
com uma precis ao , s ao:
1. Criterio do erro absoluto: [x
k
x
k1
[ ;
2. Criterio do erro relativo: [x
k
x
k1
[ [x
k
[;
3. Criterio do valor da fun c ao: [f(x
k
)[
1
, onde
1
;
4. Criterio do n umero m aximo de itera c oes: k = kmax.
O primeiro e o segundo criterios s ao assim conhecidos uma vez que os valores por eles
obtidos podem constituir estimativas para [x
k
[ e [r
x
k
[, respectivamente. O ultimo criterio
utiliza-se como factor de seguran ca, para prever o caso em que o processo iterativo possa
divergir.
Observa cao 2.6 Como a sucess ao x
k
e convergente, a sucess ao [x
k
x
k1
[ tambem o
e e o seu limite e zero. Este facto garante-nos a ec acia dos criterios do erro absoluto e
relativo.
Uma quest ao nal, para a qual n ao iremos dar grande enfase, tem a ver com a estabilidade
dos algoritmos. Como e sabido, muitos dos problemas que pretendemos resolver podem ser
sensveis a erros, isto e, mal condicionados. Um caso disso e o conhecido exemplo de Wilkinson.
Exemplo 2.7 Consideremos a seguinte equa cao
(x + 1)(x + 2) (x + 20) = 0.
Se efectuarmos as multiplica c oes vem que
x
20
+ 210x
19
+ + 20! = 0.
Perturbemos agora o sistema alterando o coeciente 210 para 210 +2
23
. Temos assim um novo
problema para resolver na forma
x
20
+ (210 + 2
23
)x
19
+ + 20! = 0.
As razes deste novo problema sao
1, 2, . . . , 8, 14 2.5i, 16.73 2.8i, . . . .
Para estes problemas os metodos iterativos a usar ter ao que ser escolhidos de forma muito
criteriosa por forma a n ao propagarem muito os erros no processo de c alculo.
Solu c ao numerica de equa c oes e sistemas n ao lineares 18
2.4 Determina cao da aproxima cao inicial
Num processo iterativo e necess ario determinar uma estimativa inicial da solu c ao do problema
a resolver. Por v arias raz oes, algumas delas obvias, e de todo o interesse que essa aproxima c ao
esteja o mais pr oximo possvel da solu c ao exacta. Existem v arios processos que permitem
encontrar essas aproxima c oes iniciais.
Exemplo 2.8 As solu c oes de x
2.1
4x + 2 = 0 podem ser aproximadas inicialmente pelas
solu c oes de x
2
4x + 2 = 0.
Exemplo 2.9 Se pretendermos aproximar a maior raiz de x
5
x500 = 0 podemos tomar para
aproxima cao inicial x
5
500 = 3.468.
As tecnicas usadas nos exemplos anteriores s ao muito intuitivas e n ao podem ser genera-
lizadas a uma gama elevada de problemas. O processo mais usual de obter uma aproxima c ao
inicial consiste em determinar um intervalo de pequena amplitude contendo a raiz a calcular.
Para isso iremos considerar dois metodos: o processo da localiza cao graca e o chamado metodo
de Rolle.
2.4.1 Localiza cao graca
Este metodo consiste em tentar obter gracamente um intervalo que contenha a raiz de
(2.1) que pretendemos calcular. Ora, o tra cado gr aco da fun c ao f pode n ao ser evidente e
constituir, em si, um processo de complicada resolu c ao. Este problema pode ser contornado
se reescrevermos a equa c ao (2.1) na forma equivalente
f
1
(x) = f
2
(x), (2.4)
sendo f
1
e f
2
fun c oes cujo tra cado gr aco seja mais simples que o de f. Assim as razes de
(2.1) ser ao as solu c oes de (2.4), isto e, os pontos de intersec c ao de f
1
com f
2
.
O processo de determina c ao gr aca de um intervalo que contem a raiz deve ser sempre
acompanhado de uma conrma c ao analtica, conrma c ao essa que pode ser dada pelo seguinte
teorema que resulta como corol ario imediato do Teorema de Bolzano.
Teorema 2.10 Se f for uma fun c ao contnua em [a, b] e se f(a)f(b) < 0 ent ao existe pelo
menos um c (a, b) tal que f(c) = 0.
Se para alem das hip oteses do teorema anterior se vericar que a derivada de f n ao muda
de sinal no intervalo [a, b], ent ao a raiz e unica nesse intervalo. Temos assim um criterio para
vericar a existencia e unicidade de zero de uma fun c ao contnua f num dado intervalo [a, b]:
se
1. f e contnua em [a, b];
2. f(a)f(b) < 0;
3. f
n ao muda de sinal em [a, b],
ent ao existe uma e uma s o raiz de f(x) = 0 em [a, b].
Exerccio 2.4.1 Localize gracamente as razes de f(x) = 0, sendo f(x) = [x[ e
x
.
Solu c ao numerica de equa c oes e sistemas n ao lineares 19
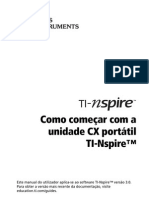
Resolu cao: Como
f(x) = 0 [x[ = e
x
,
tra cando o graco de y = [x[ e y = e
x
(Figura 2.1) vericamos que o seu ponto ( unico) de
intersec cao, x
(a raiz de f(x) = 0), se situa no intervalo (1, 0).
-1 -0.5 0.5 1
0.5
1
1.5
2
2.5
y=|x|
y=e
x
Figura 2.1: Localiza c ao gr aca.
De facto tal acontece uma vez que
1. f C((1, 0));
2. f(1)f(0) = 0.632 (1) = 0.632 < 0;
3. f
(x) = 1 e
x
, para x < 0, e como tal f
(x) < 0 para todo o x (1, 0).
2.4.2 Metodo de Rolle
Quando o metodo gr aco for de difcil aplica c ao poderemos usar o chamado metodo de Rolle.
Este metodo e muito usado quando pretendemos localizar as razes de uma equa c ao algebrica.
(Note-se que quando o grau do polin omio que dene a equa c ao algebrica for muito grande o
tra cado gr aco torna-se complicado.) A justica c ao te orica do metodo e dada pelo Teorema
de Rolle e o seu corol ario seguinte.
Teorema 2.11 Se f for uma fun c ao contnua e diferenci avel em [a, b] e se a e b s ao dois
zeros consecutivos de f
, ent ao existe, no m aximo, um (a, b) tal que f() = 0.
Este teorema, em linguagem (muito) informal, costuma ser enunciado de forma seguinte:
entre dois zeros consecutivos da derivada de uma dada fun c ao, existe, no m aximo, um zero
dessa fun c ao.
Para denir o metodo de Rolle consideremos, previamente, a seguinte deni c ao.
Deni cao 2.12 Chamam-se n umeros de Rolle da equa c ao f(x) = 0, denida em I IR, ao
conjunto formado pelos pontos fronteira de I e pelos zeros da derivada de f.
Atendendo ao teorema anterior temos que, uma vez ordenados de forma crescente, entre
dois n umeros de Rolle consecutivos existe no m aximo uma raiz real da equa c ao. Assim se o
valor da fun c ao tiver o mesmo sinal nos extremos do intervalo denido por dois n umeros de
Rolle consecutivos, a equa c ao n ao tem nenhuma raiz real nesse intervalo; caso contr ario, a
equa c ao tem uma s o raiz real no intervalo.
Solu c ao numerica de equa c oes e sistemas n ao lineares 20
-1 -0.5 0.5 1
-2.5
-2
-1.5
-1
-0.5
Figura 2.2: Corol ario do Teorema de Rolle.
Exerccio 2.4.2 Usando o metodo de Rolle, localize todas as razes reais de
f(x) x
3
2x 5 = 0.
Resolu cao: A fun cao derivada, denida pela expressao 3x
2
2, tem dois zeros
_
2/3 e +
_
2/3.
Os n umeros de Rolle da equa cao dada sao
,
_
2
3
, +
_
2
3
, +.
Como a fun cao dada e contnua em IR e
r
i
_
2/3 +
_
2/3 +
f(r
i
) +
,
temos que a unica raiz real da equa cao dada esta no intervalo (
_
2/3, +).
Note-se que o intervalo obtido no exemplo anterior ainda e bastante grande. Podemos
diminu-lo recorrendo ao seguinte resultado, obtido a partir do Teorema de Taylor e v alido
apenas para equa c oes algebricas.
Teorema 2.13 (Newton) Seja P(x) = 0 uma equa c ao algebrica. Se para x = L (L > 0) o
polin omio P e as suas sucessivas derivadas forem n ao negativas ent ao L constitui um limite
superior das razes positivas de P(x) = 0.
Demonstra cao: Seja P um poli omio de grau n. Fazendo o seu desenvolvimento de em
serie Taylor, em torno de x = L, temos que
P(x) = P(L) + P
(L)(x L) +
P
(L)
2!
(x L)
2
+ +
P
(n)
(L)
n!
(x L)
n
.
Assim e f acil concluir que, nas hip otese do teorema, P(x) > 0 para todo o x > L, o que prova
o pretendido.
Um limite inferior l para as razes negativas de P(x) = 0 poderia ser obtido usando o
resultado anterior, atendendo a que as razes negativas de uma equa c ao algebrica P(x) = 0,
onde P e um polin omio de grau n, s ao as razes positivas, com sinal contr ario, de Q(x)
(1)
n
P(x) = 0.
Solu c ao numerica de equa c oes e sistemas n ao lineares 21
Exerccio 2.4.3 Prove a arma cao anterior.
Exerccio 2.4.4 Determine limites superiores e inferiores para as razes reais de
P(x) x
3
2x 5 = 0.
Resolu cao: Assim, atendendo a que
0 1 2 3
P(x) +
P
(x) +
P
(x) +
P
(x) +
,
L = 3 e limite superior das razes de P(x) = 0. Para determinar um limite inferior das
razes seja
Q(x) (1)
3
P(x) = x
3
2x + 5
Ora, atendendo a que
0 1
Q(x) +
Q
(x) +
Q
(x) +
Q
(x) +
,
temos que l = 1 e limite inferior das razes de P(x) = 0.
2.5 Calculo das razes
Seja f uma fun c ao contnua em [a, b] tal que f(a)f(b) < 0. Ent ao, pelo Teorema 2.10 existe
pelo menos uma raiz x
de f(x) = 0 em (a, b). Se para alem disso se vericar que a derivada
de f n ao muda de sinal no intervalo [a, b], ent ao a raiz e unica nesse intervalo.
Localizada a raiz
2
, vamos construir uma sucess ao de aproxima c oes convergente para essa
raiz. O metodo mais simples de entre os que iremos estudar e o metodo das divis oes sucessivas
conhecido por metodo da bissec cao.
2.5.1 Metodo da bissec cao
No metodo da bissec c ao n ao e necess ario o conceito de aproxima c ao inicial mas sim o de
intervalo inicial I
0
= [a, b]. Comecemos por determinar o ponto medio de I
0
,
x
1
=
b + a
2
.
Assim, caso f(a)f(x
1
) < 0, temos que x
[a, x
1
]; caso contr ario temos que x
[x
1
, b]. Su-
ponhamos, sem perda de generalidade, que x
I
1
= [a, x
1
]. Obtemos assim um intervalo que
2
Localizar uma raiz signica encontrar um intervalo que a contenha essa e apenas essa raiz.
Solu c ao numerica de equa c oes e sistemas n ao lineares 22
contem a raiz x
de amplitude igual a metade da amplitude do intervalo inicial. Determinando
agora o ponto medio de I
1
,
x
2
=
x
1
+ a
2
,
podemos obter, de forma an aloga, um novo intervalo que contenha a raiz x
, de amplitude
igual a metade da amplitude do intervalo I
1
. Seja esse intervalo I
2
= [x
1
, x
2
]. O processo
repetia-se determinando uma sucess ao x
k
que converge, evidentemente, para x
.
O algoritmo do metodo da bissec c ao pode ser dado como se segue.
Algoritmo 2.1 Metodo da bissec cao
Ler a e b;
Se f(a)f(b) 0 ent ao parar;
Repetir
c :=
a+b
2
;
Se f(a)f(c) 0 ent ao b := c caso contr ario a := c
ate que [b a[
1
ou [f(c)[
2
;
Escrever x
c.
Exerccio 2.5.1 Melhore o algoritmo anterior.
Observa cao 2.14 Notemos que, no metodo da bissec c ao, a exigencia de unicidade de raiz
e superua. A unica exigencia e a de que a fun c ao tenha sinal contr ario nos extremos do
intervalo e tal e vericado sempre que exista, nesse intervalo, um n umero mpar de razes.
Verica-se facilmente que, sendo o intervalo inicial I
0
= [a, b], a amplitude do intervalo I
n
(obtido ao m de n itera c oes) e dada por
b a
2
n
,
uma vez que a amplitude do intervalo I
k+1
e sempre igual a metade da amplitude do intervalo
I
k
, para k = 1, 2, . . ..
Exerccio 2.5.2 Considere o metodo da bissec cao. Seja L a amplitude do intervalo [a, b] que
contem uma e uma s o raiz x
de f(x) = 0 e x
1
, x
2
, . . . a sucessao de pontos medios gerados
pelo referido metodo. Mostre que
1. [x
x
k+1
[ [x
k+1
x
k
[ =
L
2
k+1
.
2. O n umero n de itera c oes necessarias para garantir uma aproxima cao da raiz com uma
precisao e dado por n
ln
L
ln 2
.
Resolu cao: 1. Faz-se, sem problemas, por indu cao.
Solu c ao numerica de equa c oes e sistemas n ao lineares 23
2. Ao m de n itera c oes obtemos o valor x
n
. Assim, pela primeira parte, para calcular
qual o n que verica [x
x
n
[ , vamos determinar qual o n tal que
[x
n
x
n1
[ =
L
2
n
.
Temos, sucessivamente,
L
2
n
L
2
n
n
ln
L
ln 2
.
Observa cao 2.15 Note-se que, atendendo ao que foi demonstrado no exerccio anterior, a
demonstra c ao da convergencia do metodo da bisse c ao resulta imediatamente uma vez que
lim
k
[x
x
k
[ lim
k
L
2
k
= 0.
Este metodo possui algumas vantagens bem como algumas desvantagens em rela c ao a
outros metodos que iremos estudar nas sec c oes seguintes. A primeira grande vantagem e que
o metodo da bissec c ao converge sempre (desde que exista raiz no intervalo inicial). A segunda
vantagem e que existe uma possibilidade de, a priori, poder indicar um majorante para o erro
cometido ao m de um certo n umero de itera c oes.
A grande desvantagem do metodo da bissec c ao reside no facto da sua velocidade de con-
vergencia ser muito lenta quando comparada com a dos outros metodos. De facto prova-se
que, atendendo ` a deni c ao de ordem de convergencia dada, o metodo da bissec c ao converge
linearmente e possui uma constante erro M =
1
2
, isto e,
[e
k+1
[
1
2
[e
k
[.
Exemplo 2.16
E bem sabido que os planetas ao girar em torno do Sol (e os satelites articiais
em torno da Terra) descrevem orbitas elpticas. Para determinar em que ponto da elpse se
encontra o m ovel num determinado instante t ha que resolver a chamada equa cao de Kepler
x e sin x = z,
onde e e a excentricidade (conhecida) da elipse (e que e um valor que varia entre zero, caso a
orbita fosse circular, e pr oximo de um, caso a orbita fosse muito alongada) e z e um n umero que
se calcula a partir de t. Aqui f(x) = x e sin x z.
Vamos considerar o caso em que e = 0.5 e z = 0.7. Temos que f(0) = 0.7 < 0 e
f(2) = 1.3 0.5 sin 2 > 1.3 0.5 = 0.8 > 0. Assim, podemos come car o metodo da bissec cao
com o intervalo I
0
= [0, 2]. Pelo facto de f(1) < 0 temos que a solu cao pretendida se encontra no
intervalo I
1
= [1, 2]. Ap os cinco aplica c oes do metodo da bissec cao conclumos que a solu cao se
encontra no intervalo I
5
= [1.125, 1.1875]. Tomando como aproxima cao para a solu cao o ponto
medio 1.15625 = (1.125 + 1.1875)/2 temos a garantia que o valor absoluto do erro e inferior a
0.03125.
Exerccio 2.5.3 Usando o metodo da bissec cao, determine um valor aproximado para o zero de
f(x) = [x[ e
x
, com um erro que nao exceda 0.15.
Solu c ao numerica de equa c oes e sistemas n ao lineares 24
Resolu cao: Atendendo ao exerccio 3.1, temos que a raiz x
de f(x) = 0 existe e e unica no
intervalo (1, 0). Vamos determinar qual o menor valor de n tal que [x
x
n
[ 0.15. Pelo
exerccio anterior, esse valor pode ser determinado por
1
2
n
0.15 n
ln0.15
ln 2
= 2.74.
Logo, n = 3, isto e, temos que efectuar 3 itera c oes. Partindo do intervalo inicial (1, 0)
temos x
1
= 0.5. Como f(x
1
) = 0.16065 vem que
x
[1, 0.5].
Prosseguindo o processo obtemos x
2
= 0.75 e como f(0.75) = 2.7776 vem que
x
[0.75, 0.5].
Conclumos entao que x
x
3
= 0.6256 e uma aproxima cao cujo erro nao excede a
tolerancia dada.
2.5.2 Metodo de Newton
O metodo de Newton, que iremos estudar nesta sec c ao, e um dos metodos mais conhecidos
e usados na determina c ao de aproxima c oes numericas de razes de equa c oes n ao lineares.
Para o denir, iremos come car por efectuar uma abordagem analtica fazendo depois a sua
interpreta c ao geometrica.
Seja f C
2
([a, b]), com [a, b] IR, e x
[a, b] a unica raiz de f(x) = 0 nesse intervalo.
Pela f ormula de Taylor temos que, se x
0
[a, b],
f(x
) = f(x
0
) + f
(x
0
)(x
x
0
) +
f
()
2
(x
x
0
)
2
, Ix
, x
0
.
Como f(x
) = 0 e supondo f
(x
) ,= 0 para todo o x [a, b], vem que
x
= x
0
f(x
0
)
f
(x
0
)
f
()
2f
(x
0
)
(x
x
0
)
2
, Ix
, x
0
. (2.5)
Seja x
1
= x
0
f(x
0
)
f
(x
0
)
. Procedendo de forma an aloga, poderemos denir um metodo iterativo
dado pela f ormula de recorrencia
x
k+1
= x
k
f(x
k
)
f
(x
k
)
, k = 0, 1 . . . , (2.6)
que pretendemos que seja convergente para x
. Este processo iterativo e designado por
metodo de Newton ou metodo de Newton-Raphson ou ainda metodo da tangente. Esta ultima
designa c ao resulta da interpreta c ao geometrica do processo iterativo.
Solu c ao numerica de equa c oes e sistemas n ao lineares 25
Interpreta cao geometrica: Consideremos a recta tangente ` a curva y = f(x) no ponto de
abcissa x
k
. Essa recta e dada por
y = f(x
k
) +
1
f
(x
k
)
(x x
k
).
O ponto de intersec c ao da recta tangente com o eixo das abcissas e dado por
x = x
k
f(x
k
)
f
(x
k
)
.
Temos assim que a itera c ao x
k+1
dada pelo metodo de Newton e a abcissa do ponto de
intersec c ao da recta tangente ` a curva y = f(x) no ponto (x
k
, f(x
k
)) com a recta y = 0.
x
2
x
1
x
0
Figura 2.3: Metodo de Newton.
Vamos agora estabelecer quais as condi c oes que dever ao ser impostas para que a sucess ao
de aproxima c oes geradas pelo metodo de Newton convirja para a raiz x
de f(x) = 0.
Teorema 2.17 Se
1. f C
2
([a, b]),
2. f(a)f(b) < 0,
3. f
(x) ,= 0, x [a, b],
4. f
(x) 0 ou f
(x) 0, x [a, b],
ent ao a sucess ao x
k
, k = 0, 1, . . ., gerada pelo metodo (2.6), com x
0
[a, b] tal que
5. f(x
0
)f
(x
0
) > 0,
converge para a unica raiz x
de f(x) = 0 em [a, b].
Demonstra cao: Vamos supor, sem perda de generalidade, que: f(a) < 0, f
e positiva
em [a, b] e que f
e n ao negativa no mesmo intervalo. Supondo vericadas as hip oteses do
teorema, consideremos x
0
= b. Provemos que a sucess ao x
k
gerada pelo metodo (2.6) tem
as seguintes propriedades.
Solu c ao numerica de equa c oes e sistemas n ao lineares 26
A sucess ao e n ao crescente e limitada.
Com efeito, vamos provar (por indu c ao) que x
k+1
[x
, x
k
], para todo o k IN
0
. Por
(2.5) tem-se que,
x
x
1
=
f
()
2f
(b)
(x
b)
2
0, Ix
, b,
isto e, x
x
1
. Por outro lado, por (2.6), com k = 0, tem-se que x
1
< b.
Suponhamos agora que x
k
[x
, x
k1
] [x
, b]. Temos ent ao que, de modo an alogo ao
efectuado em (2.5),
x
_
x
k
f(x
k
)
f
(x
k
)
_
=
f
(
k
)
2f
(x
k
)
(x
x
k
)
2
,
k
Ix
, x
k
, (2.7)
ou seja
x
x
k+1
=
f
(
k
)
2f
(x
k
)
(x
x
k
)
2
0.
Isto implica que x
x
k+1
. Por outro lado, por (2.6) e atendendo ` as hip oteses do
teorema, temos que x
k+1
x
k
0. Prov amos ent ao o pretendido.
A sucess ao converge para x
.
A convergencia da sucess ao decorre do facto de ela ser n ao crescente e limitada. Seja
= lim
k+
x
k
. Vamos provar que = x
. Tomando limites em (2.6) e tendo em
conta o facto de f C
2
([a, b]), temos que
=
f()
f
()
o que implica f() = 0. Uma vez que x
e a unica raiz de f em [a, b] temos que
= lim
k+
x
k
= x
.
Est a assim demonstrado o teorema.
O teorema seguinte estabelece igualmente uma condi c ao necess aria para a convergencia
do metodo de Newton. A diferen ca em rela c ao ao anterior reside apenas na quinta condi c ao:
enquanto que o teorema anterior nos d a um criterio para a escolha da aproxima c ao inicial, o
seguinte d a-nos uma condi c ao que garante a convergencia do metodo para qualquer aproxi-
ma c ao inicial escolhida no intervalo [a, b].
Teorema 2.18 Se
1. f C
2
([a, b]),
2. f(a)f(b) < 0,
3. f
(x) ,= 0, x [a, b],
4. f
(x) 0 ou f
(x) 0,
5.
f(a)
f
(a)
b a e
f(b)
f
(b)
b a,
ent ao, qualquer que seja x
0
[a, b], a sucess ao x
k
gerada pelo metodo (2.6) converge para
a unica raiz x
de f(x) = 0 em [a, b].
Solu c ao numerica de equa c oes e sistemas n ao lineares 27
Demonstra cao: As hip oteses 1, 2 e 3 garantem a existencia e unicidade de raiz em [a, b].
Provemos que se x
0
= a ou x
0
= b ent ao x
1
(a, b). Com efeito, sendo x
0
= a tem-se
x
1
= a f(a)/f
(a) e da hip otese 5 vem que (b a) < f(a)/f
(a) < b a, donde x
1
< b.
Por outro lado, pelas hip oteses 2 e 3 temos que f(a) tem sinal contr ario a f
(a) e como tal
f(a)/f
(a) < 0. Assim x
1
a < 0 e logo a < x
1
. De modo identico se provaria que se x
0
= b
ent ao x
1
(a, b).
Suponhamos que f(a) < 0. Pela hip otese 4, para x [a, b], f
(x) 0 ou f
(x) 0.
Consideremos f
(x) 0. Ent ao, de (2.5),
x
x
1
=
f
()
2f
(a)
(x
x
0
)
2
0, (a, x
),
e, como tal, x
1
(a, x
). Prova-se tambem que, nas mesmas condi c oes, x
2
(x
1
, x
) e,
sucessivamente, x
k+1
(x
k
, x
), k = 0, 1, . . ..
Prov amos assim que a sucess ao x
k
converge monotonamente para x
.
Os restantes casos podem ser considerados de forma an aloga.
O algoritmo para o metodo de Newton pode ser dado como se segue.
Algoritmo 2.2 Metodo de Newton
Ler x
0
;
k := 0;
Repetir
d :=
f(x
k
)
f
(x
k
)
;
x
k+1
:= x
k
d;
k := k + 1
ate que [d[
1
ou k = kmax;
Escrever x
x
k
.
Exerccio 2.5.4 Melhore o algoritmo anterior.
Este metodo possui vantagens e desvantagens em rela c ao ao metodo da bissec c ao. As
grandes desvantagens do metodo de Newton residem no facto deste poder divergir (caso a
aproxima c ao inicial escolhida n ao seja sucientemente pr oxima da raiz) e de haver necessidade
de calcular a derivada da fun c ao (mais esfor co computacional). Por outro lado o metodo de
Newton converge muito rapidamente o que faz com que seja um dos metodos mais ecazes
para a aproxima c ao de razes de equa c oes n ao lineares.
N ao e difcil provar a convergencia e quadr atica do metodo de Newton. De facto, por
(2.7),
x
x
k+1
=
f
()
2f
(x
k
)
(x
x
k
)
2
, Ix
, x
k
.
Solu c ao numerica de equa c oes e sistemas n ao lineares 28
Tomando m odulos obtemos
[e
k+1
[ M[e
k
[
2
,
com
M =
1
2
max
x[a,b]
[f
(x)[
min
x[a,b]
[f
(x)[
. (2.8)
Assim, supondo vericadas as hip oteses do Teorema 2.17, conclumos que o metodo de Newton
tem ordem de convergencia p = 2.
Exerccio 2.5.5 Mostre que, se x
k
for a sucessao gerada pelo metodo de Newton (2.6) entao
[x
x
k+1
[ M[x
k+1
x
k
[
2
,
com M dado por (2.8).
Outra vantagem do metodo de Newton em rela c ao ao metodo da bissec c ao tem a ver
com o facto do metodo de Newton se poder generalizar muito facilmente (como veremos)
para sistemas de equa c oes n ao lineares. Alem disso, este metodo tambem se pode aplicar ao
c alculo numerico de razes complexas.
Exerccio 2.5.6 Localize gracamente as razes de f(x) = 0, onde
f(x) = x
2
1 ln (x + 1),
e aproxime a maior delas usando o metodo de Newton duas vezes.
Resolu cao: Como f(x) = 0 x
2
1 = ln (x + 1), tra cando o graco de y = x
2
1 e de
y = ln (x + 1) (gura 4) vericamos que f(x) = 0 possui duas razes reais: x
1
(1, 0) e
x
2
(1, 2).
-2 -1 1 2
-3
-2
-1
1
2
3
y=ln(x+1)
y=x
2
Figura 2.4: Localiza c ao gr aca.
Fa camos a conrma cao analtica apenas para x
2
. Assim:
1. f C((1, 2));
2. f(1)) = ln 2 < 0 e f(2) = 3 ln 3 = 1.901388 > 0;
3. f
(x) = 2x (x 1)
1
> 0, para x (1, 2).
Solu c ao numerica de equa c oes e sistemas n ao lineares 29
Logo a raiz x
2
de f(x) = 0 existe e e unica no intervalo [1, 2].
Para aplicarmos o metodo de Newton temos que primeiro provar a sua convergencia. Como
f(x) = x
2
1 ln (x + 1), f
(x) = 2x (x 1)
1
e f
(x) = 2 + (x 1)
2
temos que
f C
2
([1, 2]). Por outro lado, como f
(x) 0, para todo o x [1, 2], o Teorema 2.17
garante que o metodo de Newton aplicado `a equa cao dada gera uma sucessao de valores
convergentes para x
2
desde que x
0
seja escolhido por forma a que f(x
0
)f
(x
0
) > 0, isto e,
por forma a que
f(x
0
) > 0.
Seja entao x
0
= 2. Assim
x
1
= 2
f(2)
f
(2)
= 1.48144;
x
2
= 1.48144
f(1.48144)
f
(1.48144)
= 1.369785.
Uma estimativa para o erro pode ser dada por
[x
2
x
1
[ = 0.1116554.
Metodo da secante. A desvantagem que o metodo de Newton apresenta ao calcular a
derivada de uma fun c ao pode ser contornada pelo metodo da secante. Este metodo consiste
em substituir em (2.6) f
(x
k
) por (f(x
k
) f(x
k1
))/(x
k
x
k1
). Obtemos assim a f ormula
de recorrencia
x
k+1
= x
k
f(x
k
)
f(x
k
) f(x
k1
)
(x
k
x
k1
), k = 0, 1, . . . .
Em termos geometricos este metodo resulta do metodo de Newton pela substitui c ao da recta
tangente ` a curva y = f(x) em (x
k
, f(x
k
)) pela secante que passa pelos pontos (x
k
, f(x
k
)) e
(x
k1
, f(x
k1
)). Essa recta e dada pela express ao
y = f(x
k
) +
f(x
k
) f(x
k1
)
x
k
x
k1
(x x
k
).
Considerando y = 0 temos que o valor de x obtido e igual ao valor de x
k+1
obtido pelo metodo
da secante.
3
Para que a sucess ao gerada pelo metodo da secante convirja para a unica raiz de
f(x) = 0 em [a, b] prova-se que e suciente que se veriquem as hip oteses do Teorema 2.18.
Prova-se ainda que a ordem de convergencia do metodo da secante e
p =
1 +
5
2
1.618.
Por este facto a convergencia deste metodo diz-se superlinear.
Exerccio 2.5.7 Construa o algoritmo para o metodo da secante.
Exerccio 2.5.8 Repita o exerccio 2.5.6 para o metodo da secante.
3
Note-se que o metodo da secante necessita n ao de uma mas de duas aproxima c oes iniciais x
1
e x
0
, muitas
vezes tomadas como sendo os extremos do intervalo que contem a raiz.
Solu c ao numerica de equa c oes e sistemas n ao lineares 30
2.5.3 Metodo do ponto xo
O metodo do ponto xo n ao e propriamente um metodo mas sim uma classe de metodos (o
metodo de Newton, por exemplo, pertence ` a classe de metodos do ponto xo). Este metodo
tem grande import ancia na resolu c ao de todo o tipo de equa c oes, incluindo as equa c oes
diferenciais e integrais. Neste momento vamos apenas considerar o problema da determina c ao
das razes de uma equa c ao n ao linear f(x) = 0.
O metodo do ponto xo consiste em converter o problema de determinar os zeros de uma
fun c ao no problema (equivalente) de calcular os pontos xos de uma outra fun c ao.
Deni cao 2.19 Seja f uma fun c ao denida num intervalo [a, b] IR. Dizemos que x
[a, b] e um ponto xo de f se x
= f(x
).
Assim, o problema de determinar os valores de x para os quais f(x) = 0 (zeros de f) e
transformado no problema equivalente de determinar os valores de x para os quais g(x) = x
(pontos xos de g). Consideremos o seguinte exemplo.
Exemplo 2.20 A excentricidade da orbita de Venus e dada por e = 0.07. Suponhamos que
pretendemos resolver a equa cao de Kepler
f(x) = 0 x 0.007 sin x z = 0,
quando z = 0.7. Como o termo 0.007 sin x e muito menor que 0.7 temos que uma aproxima cao
para a raiz da solu cao pode ser dada por x 0.7. Substituindo este valor em 0.007 sin x obtemos
0.007 sin 0.7 0.004510. Introduzindo este valor na equa cao de Kepler temos uma nova
aproxima cao para a sua raiz dada por x 0.7 + 0.004510 = 0.704510. Este processo poderia
continuar dando assim origem a um processo iterativo da forma x
k+1
= 0.007 sin x
k
0.7,
k = 0, 1, . . ., e x
0
= 0.7.
Depois de transformarmos o problema na forma da determina c ao dos pontos xos de uma
fun c ao g, as sucessivas aproxima c oes s ao calculadas, a partir de uma aproxima c ao inicial x
0
dada, pela f ormula
x
k+1
= g(x
k
), k = 0, 1, 2, . . . . (2.9)
A fun c ao g e chamada fun cao de itera cao do metodo. Notemos que, no caso do metodo de
Newton, a fun c ao de itera c ao e dada por
g(x) = x
f(x)
f
(x)
.
No exemplo anterior escolhemos para fun c ao de itera c ao g(x) = 0.7 + 0.007 sin x.
A quest ao que se coloca e a seguinte: dada uma equa c ao f(x) = 0 com raiz x
[a, b],
como escolher uma fun c ao de itera c ao g por forma a que as sucessivas aproxima c oes dadas
por (2.9) convirjam para x
? Antes de mais notemos que, supondo que g e contnua e que
x
k
x
, se verica
x
= limx
k+1
= limg(x
k
) = g(limx
k
) = g(x
).
Assim, uma condi c ao necess aria para que o processo iterativo (2.9) convirja para zero x
de
f e que x
seja um ponto xo de g.
Solu c ao numerica de equa c oes e sistemas n ao lineares 31
Exemplo 2.21 Notemos que a equa cao de Kepler dada no exemplo anterior se pode escrever
na forma
x = g(x) = arcsin
x 0.7
0.007
.
Neste caso, para a aproxima cao inicial x
0
= 0.7 temos que x
1
= 0 e x
2
= arcsin (100) que e
um valor que nem sequer esta denido.
Como poderemos decidir qual a melhor escolha para a fun c ao de itera c ao? Em geral,
interessa que g(x) varie pouco com x. O caso ideal seria ter g constante; nesse caso, para
x
0
arbitr ario, teramos x
1
= x
. Para responder a esta quest ao, consideremos o seguinte
teorema.
Teorema 2.22 (Ponto Fixo) Se
1. g e uma fun c ao contnua em [a, b] e
2. g(x) [a, b] para todo o x [a, b],
ent ao g tem um ponto xo em [a, b]. Se, alem disso,
3. [g
(x)[ K < 1, para todo o x [a, b],
ent ao o ponto xo e unico e a sucess ao gerada por (2.9) converge para esse ponto, qualquer
que seja a aproxima c ao inicial x
0
[a, b].
Demonstra cao: Vamos mostrar sucessivamente a existencia de ponto xo, a unicidade e,
nalmente, a convergencia do metodo.
Existencia.
Se g(a) = a ou g(b) = b temos que g tem (obviamente) um ponto xo. Caso contr ario,
e atendendo ` a hip otese 2 do teorema, temos que g(a) > a e g(b) < b. Consideremos a
fun c ao auxiliar h(x) = g(x) x denida em [a, b]. Como h e contnua e h(a)h(b) < 0
conclumos que existe um ponto [a, b] tal que h() = 0, ou seja, tal que g() = .
Unicidade
Suponhamos que
1
e
2
s ao dois pontos xos de g. Ent ao
[
1
2
[ = [g(
1
) g(
2
)[ = [g
()[[
1
2
[ K[
1
2
[,
onde pertence ao intervalo denido por
1
e
2
. Assim sendo (1 K)[
1
2
[ 0 o
que implica
1
=
2
, uma vez que 0 K < 1.
Convergencia
Considerando x
0
[a, b] temos que
[x
k+1
x
[ = [g(x
k
) g(x
)[ = [g
(
k
)[[x
k
x
[ K[x
k
x
[,
onde pertence ao intervalo denido por x
k
e x
. Assim sendo
[x
k+1
x
[ K
k+1
[x
0
x
[. (2.10)
Tomando limites e atendendo a que K < 1 temos que
lim
k+
x
k+1
= x
,
o que prova o pretendido.
Solu c ao numerica de equa c oes e sistemas n ao lineares 32
Exemplo 2.23 Resolvamos mais uma vez a equa cao de Kepler mas, desta vez, consideremos:
1. a excentricidade e = 0.5 e z = 0.7;
2. a excentricidade e = 0.5 e z = 2.
Vamos apenas efectuar os calculos para o caso 2, isto e, vamos considerar apenas a equa cao
x 0.5 sin x 2 = 0. Para usar o metodo do ponto xo consideremos a fun cao de itera cao
g(x) = 0.5 sin x + 2, x [2, 3].
Vejamos se, para esta fun cao e para este intervalo, se vericam as condi c oes de convergencia do
metodo.
Como g e uma fun cao contnua, vamos provar que g(x) [2, 3], para todo o x [2, 3], isto e,
que o graco de g esta totalmente contido no quadrado [2, 3] [2, 3]. Para isso temos que provar
que g(2), g(3) [2, 3] e que o valor g em todos os seus extremos locais tambem se encontra
nesse intervalo. Ora, g(2) = 2.4546, g(3) = 2.0706 e a fun cao g e mon otona decrescente (pois
g
(x) = 0, 5 cos x). Assim sendo, g(x) [2, 3], para todo o x a variar nesse intervalo.
Para provar que o metodo converge basta apenas provar que o majorante do m odulo de g
em
[2, 3] e inferior a um. Como se ve facilmente
[g
(x)[ = [0.5 cos x[ 0.5,
e, como tal, K = 0.5 e o metodo x
k+1
= 0.5 sin x
k
+ 2, k = 0, 1, 2, . . ., converge para a unica
raiz da equa cao em [2, 3], qualquer que seja x
0
[2, 3]. A determina cao das sucessivas itera c oes
e feita de forma obvia.
0.2 0.5 x
0
x
1
x
2
1.4
0.2
0.4
0.6
0.8
1
1.2
1.4
Figura 2.5: Caso 1: g(x) = 0.5 sin x + 0.7 e x
0
= 0.7.
Observa cao 2.24 Nas Figuras 2.5 e 2.6 podemos visualizar o gr aco da fun c ao de itera c ao
do metodo do ponto xo considerado no exemplo anterior, para os casos 1 e 2, respectivamente,
bem como o gr aco da bissectriz dos quadrantes mpares. A abcissa da intersec c ao dos dois
gr acos e o ponto xo que pretendemos calcular. Como se pode ver, o metodo do ponto xo
pode ser descrito da seguinte forma (gr aca). A partir de x
0
, no eixo das abcissas, tra camos
um segmento de recta vertical ate intersectar o gr aco de g. A ordenada da intersec c ao
e o ponto x
1
. A partir do ponto de intersec c ao tra camos um segmento de recta horizontal
ate encontrarmos a bissectriz y = x. A abcissa desse ponto nal e x
1
. Para determinar
as restantes itera c oes repete-se sucessivamente este processo: vertical ate ao graco de g,
horizontal ate `a bissectriz.
Solu c ao numerica de equa c oes e sistemas n ao lineares 33
2.2 x
0
x
1
x
2
2.8
2
2.2
2.4
2.6
2.8
3
Figura 2.6: Caso 2: g(x) = 0.5 sin x + 2 e x
0
= 2.5.
Regressemos, de novo, ` a quest ao de saber qual a melhor escolha para a fun c ao de itera c ao.
O Teorema do Ponto Fixo permite-nos armar que se uma fun c ao de itera c ao n ao vericar as
hip oteses do teorema, essa fun c ao n ao deve ser considerada. Pode, no entanto, dar-se o caso
de possuirmos duas fun c oes de itera c ao que veriquem, ambas, as hip oteses do teorema. Neste
caso, por qual optar? Notemos que, por (2.10), se considerarmos duas fun c oes de itera c ao g
1
e g
2
tais que
[g
1
(x)[ [g
2
(x)[ < 1, x [a, b],
podemos concluir que a sucess ao denida pelo metodo x
k+1
= g
1
(x
k
), k = 0, 1, 2, . . ., converge
mais rapidamente que a sucess ao denida por x
k+1
= g
2
(x
k
), k = 0, 1, 2, . . ., pois para o
primeiro metodo temos [e
k+1
[ M
1
[e
k
[ e para o segundo [e
k+1
[ M
2
[e
k
[, com M
1
M
2
.
Assim sendo, a escolha deveria recair sobre a fun c ao g
1
.
Observa cao 2.25 Notemos que, no caso geral, o metodo do ponto xo tem uma convergencia
linear. Alem disso, essa convergencia e local, uma vez que ela s o acontece quando o x
0
est a
sucientemente pr oximo do ponto xo.
Consideremos agora os seguintes corol arios do Teorema do Ponto Fixo.
Corolario 2.26 Nas hip oteses do teorema anterior tem-se que
[e
k
[ K
k
maxx
0
a, b x
0
.
Demonstra cao: Resulta imediatamente de (2.10).
Corolario 2.27 Nas hip oteses do teorema anterior tem-se que
[e
k
[
K
k
1 K
[x
1
x
0
[.
Demonstra cao: Por um processo an alogo ao efectuado na demonstra c ao do Teorema do
Ponto Fixo temos que
[x
k+1
x
k
[ K
k
[x
1
x
0
[.
Solu c ao numerica de equa c oes e sistemas n ao lineares 34
Consideremos l > k e [x
l
x
k
[. Assim
[x
l
x
k
[
l1
j=k
[x
j+1
x
j
[ [x
1
x
0
[
l
j=k
K
j
.
Logo
l
j=k
K
j
K
k
j=0
K
j
=
K
k
1 K
.
Conclumos ent ao que
[x
l
x
k
[
K
k
1 K
[x
1
x
0
[.
Tomando limites quando l + temos
[x
x
k
[
K
k
1 K
[x
1
x
0
[,
o que prova o pretendido.
Como vimos, o metodo do ponto xo tem convergencia linear. No entanto, o metodo de
Newton (caso particular do metodo do ponto xo quando a fun c ao de itera c ao e dada por
g(x) = x f(x)/f
(x)) tem convergencia quadr atica. O pr oximo teorema diz-me em que
condi c oes podemos garantir uma ordem de convergencia dois no metodo do ponto xo.
Teorema 2.28 Suponhamos que, para alem das hip oteses do Teorema do Ponto Fixo, se tem
g
(x
) = 0 (onde x
e o unico ponto xo de g em [a, b]), e g
limitada em [a, b]. Ent ao o
metodo do ponto xo (2.9) converge para x
de forma quadr atica, qualquer que seja x
0
[a, b].
Demonstra cao: Pelo Teorema do Ponto Fixo temos que o metodo (2.9) converge para x
.
Falta apenas provar que a convergencia e quadr atica.
Pela f ormula de Taylor temos que
x
k+1
x
= g(x
k
) g(x
) = g
(x
)(x
k
x
) +
1
2
g
(
k
)(x
k
x
)
2
, Ix
, x
k
.
Como g
(x
) = 0 conclumos facilmente que
[e
k+1
[ M[e
k
[
2
,
onde
M =
1
2
max
x[a,b]
[g
(x)[.
Est a assim demonstrado o pretendido.
Exerccio 2.5.9 Mostre que se no ponto xo x
de g se tem g
(x
) = g
(x
) = 0 podemos
concluir (mediante certas condi c oes) que o metodo (2.9) tem convergencia c ubica. Diga quais
sao essas condi c oes de convergencia.
Solu c ao numerica de equa c oes e sistemas n ao lineares 35
2.6 Zeros de polin omios
Suponhamos agora que pretendemos resolver a equa c ao algebrica p(x) = 0 onde
p(x) = a
n
x
n
+ a
n1
x
n1
+ + a
1
x + a
0
, a
n
,= 0, (2.11)
e um polin omio de coecientes reais. Este problema aparece com muita frequencia e existem
para ele muitos resultados especcos. Nesta sec c ao faremos apenas uma breve referencia a
alguns desses resultados.
2.6.1 Resultados basicos
Um resultado b asico sobre polin omios e dado no Teorema Fundamental da
Algebra, devido a
Gauss e a Euler e que apresentamos sem demonstra c ao.
Teorema 2.29 (Teorema Fundamental da
Algebra) Seja p um polin omio de grau n
1 de coecientes reais. Ent ao existe x
C tal que p(x
) = 0.
Temos tambem que, no caso particular dos polin omios, se x
e um zero real de p ent ao
p(x) = (x x
)q(x),
onde q e um polin omio de grau n 1 de coecientes reais. Se x
e um zero complexo de p o
seu conjugado x
tambem o e e, como tal,
p(x) = (x x
)(x x
)q(x),
sendo q um polin omio de grau n 2 de coecientes reais. Atendendo a estes resultados
podemos escrever.
Corolario 2.30 Se p for um polin omio de grau n de coecientes reais, admite n zeros, reais
ou complexos, iguais ou distintos.
Corolario 2.31 Se p for um polin omio de grau mpar admite, pelo menos, uma raiz real.
A localiza c ao das razes reais de uma equa c ao algebrica pode ser feita por variadssimos
processos. De entre os processos mais populares destaca-se o metodo de Rolle (j a referido
neste curso). Outro resultado muito util para determinar o n umero de zeros reais positivos de
um polin omio foi enunciado por Descartes em 1637: O n umero de zeros reais positivos de um
polin omio e limitado pelo n umero de vari c oes de sinal da sucess ao dos seus coecientes. Mais
tarde Gauss demonstrou que o n umero de zeros reais positivos de um poli omio (contando
com a multiplicidade) tem a mesma paridade do n umero de varia c oes de sinal da sucess ao
dos seus coecientes. Temos ent ao o seguinte teorema.
Teorema 2.32 (Regra de Sinal de Descartes) O n umero de razes reais positivas da e-
qua c ao p(x) = 0, sendo p dado por (2.11), e igual ao n umero de varia c oes de sinal da sucess ao
a
n
, a
n1
, . . . , a
0
ou um n umero inferior mas da mesma paridade.
Solu c ao numerica de equa c oes e sistemas n ao lineares 36
Demonstra cao: Vamos efectuar a demonstra c ao por indu c ao.
Comecemos por considerar p um polin omio de grau um. Neste caso o resultado e obvio
pois a raiz de p(x) = 0, com p(x) = a
1
x + a
0
, s o e positiva quando e s o quando a
1
a
0
> 0.
Suponhamos agora que o resultado e v alido para todos os polin omios de grau n 1
e consideremos p um polin omio de grau n dado por (2.11), com a
n
> 0 (sem perda de
generalidade).
Se a
0
= p(0) > 0, o n umero de varia c oes de sinal da sucess ao dos coecientes de p tem que
ser par pois o primeiro e o ultimo termo da sucess ao s ao positivos. Por outro lado, o n umero
de razes positivas de p(x) = 0 tambem e par pois lim
x+
= +.
A mesma argumenta c ao poderia ser usada no caso de a
0
= p(0) < 0; neste caso, tanto
o n umero de vari c oes de sinal da sucess ao dos coecientes de p como o n umero de zeros
positivos de p s ao mpares. Conclumos ent ao que o n umero de razes positivas de p(x) = 0
tem a mesma paridade do n umero de varia c oes de sinal.
Falta apenas provar que o n umero de varia c oes de sinal limita o n umero de razes positivas.
Suponhamos que p(x) = 0 tem m razes reais positivas e que o n umero de varia c oes de sinal
da sucess ao dos seus coecientes e V < m. Assim sendo, temos que ter m V + 2 (para
manter a paridade). Mas, pelo Teorema de Rolle, p
tem que ter pelo menos V +1 razes reais
positivas, o que contraria a hip otese de indu c ao uma vez que o n umero de varia c oes de sinal
dos coecientes de p
(polin omio de grau n 1) e inferior a V . Logo m V .
Observa cao 2.33 Notemos que a regra de sinal de Descartes n ao tem em conta a multipli-
cidade das razes. No entanto, podemos armar o resultado demonstrado por Gauss, isto e
que o n umero de razes reais positivas de p(x) = 0 (contando com a multiplicidade) tem a
mesma paridade do n umero de varia c oes de sinal da sucess ao dos seus coecientes.
Exerccio 2.6.1 Usando a regra de sinal de Descartes, determine o n umero de razes reais de
p(x) = 0, onde p(x) = x
3
2x 5.
Resolu cao: Comecemos pelas razes positivas. Como a sucessao de sinais dada pelos coecientes
no polin omio e +, , temos que o n umero de varia c oes de sinal e 1 e como tal existe
uma raiz positiva de p(x) = 0.
Para as razes negativas consideremos o polin omio auxiliar q(x) := (1)
3
p(x) = x
3
2x+
5. Como a sucessao de sinais dada pelos coecientes do polin omio q e +, , + temos que
o n umero de varia c oes de sinal e 2 e como tal existem 2 ou 0 razes negativas de p(x) = 0.
2.6.2 Calculo de valores de um polin omio. Factoriza cao
O c alculo dos zeros de um polin omio e feito, na maioria das vezes, recorrendo ao metodo de
Newton. Quando se aplica este metodo h a necessidade de calcular, em cada itera c ao, o valor
do polin omio e da sua derivada num ponto. Esse c alculo deve ser efectuado de forma eciente
uma vez que grande parte do esfor co computacional a ele se deve.
Suponhamos que se pretende calcular p(x), com p um polin omio dado por (2.11). Se
considerarmos o polin omio escrito na forma can onica (tal como em (2.11)) efectuamos n
adi c oes/subtrac c oes e 2n 1 multiplica c oes/divis oes. No entanto, se considerarmos
p(x) = a
0
+ x(a
1
+ x(a
2
+ + x(a
n1
+ a
n
x))),
Solu c ao numerica de equa c oes e sistemas n ao lineares 37
designada por forma encaixada do polin omio, ao calcular p(x) s o efectuamos n adi c oes/subtra-
c c oes e n multiplica c oes/divis oes. Esta forma e a base do chamado metodo de Horner.
O algoritmo seguinte permite calcular o valor p(x).
Algoritmo 2.4 Metodo de Horner
Ler a
i
, i = 0, 1, . . . , n;
Ler x;
p := a
n
;
Para i de n 1 ate 0 fazer
p := px + a
i
;
Escrever p.
Se p for um polin omio dado por (2.11) e x um n umero real temos que
p(x) = (x x)q(x) + r, (2.12)
onde q e um polin omio de grau n 1, digamos
q(x) = b
n1
x
n1
+ b
n2
x
n2
+ + b
1
x + b
0
, (2.13)
e r uma constante. Note-se que o valor de p(x) = r, ou seja, temos o seguinte resultado
demonstrado por Paolo Runi (1765-1822).
Teorema 2.34 (Runi) O valor numerico de p(x) de um polin omio p(x) em x = x e igual
ao resto da divis ao de p(x) por (x x).
A chamada regra de Runi, que consiste em substituir (2.11) e (2.13) em (2.12) e igualando
os coecientes de potencias de x do mesmo grau, permite obter os valores b
i
, i = 0, 1, . . . , n1,
e o valor de r de acordo com o seguinte algoritmo.
Algoritmo 2.5 Regra de Runi
Ler a
i
, i = 0, 1, . . . , n;
Ler x;
b
n1
:= a
n
;
Para i de n 2 ate 0 fazer
b
i
:= b
i+1
x + a
i+1
;
r := b
0
x + a
0
;
Escrever r e b
i
, i = 0, 1, . . . , n 1.
Estes dois algoritmos permitem obter facilmente os valores da derivada de p dado por
(2.11) num dado ponto x. Assim, uma vez que, por (2.12),
p
(x) = (x x)q
(x) + q(x),
temos que p
(x) = q(x).
O algoritmo seguinte usa o metodo de Horner e a regra de Runi para calcular o valor
de derivada de p em x.
Solu c ao numerica de equa c oes e sistemas n ao lineares 38
Algoritmo 2.6 Valores da derivada de um polin omio
Ler a
i
, i = 0, 1, . . . , n;
Ler,x;
b
n1
:= a
n
;
q := b
n1
;
Para i de n 2 ate 0 fazer
b
i
:= b
i+1
x + a
i+1
;
q := qx + b
i
;
Escrever q.
2.6.3 Calculo dos zeros
Vamos come car por considerar o caso em que p, dado por (2.11), tem apenas zeros reais
simples. Neste caso, podemos aplicar qualquer um dos metodos iterativos estudados. No
entanto, sugerimos o seguinte procedimento.
1. Determina-se a localiza c ao (mesmo que grosseira) dos zeros x
n
< x
n1
< < x
2
< x
1
.
2. Partindo de um valor x
0
> x
1
, usando o metodo de Newton, calcula-se uma aproxima c ao
numerica para o maior zero x
1
, com a precis ao desejada (prove que o metodo converge).
3. Pelo algoritmo de Horner/Runi divide-se p por x x
1
e regressa-se ao passo 2 para
determinar x
2
. Repetindo sucessivamente este processo, determinamos numericamente
todos os zeros do polin omio.
4. Para renar as aproxima c oes obtidas, aplica-se o metodo de Newton a p sendo as apro-
xima ces iniciais os valores obtidos no passo 3.
Exerccio 2.6.2 Construa o algoritmo implcito no procedimento descrito anteriormente.
No caso de alguma das razes x
ter multiplicidade m > 1 podemos escrever
p(x) = (x x
)
m
q(x),
onde o polin omio q, de grau nm, e tal que q(x
) ,= 0. A aproxima c ao desta raiz e feita com
recurso ao metodo de Newton modicado
x
k+1
= x
k
m
p(x
k
)
p
(x
k
)
, k = 0, 1, 2, . . . . (2.14)
Exerccio 2.6.3 Prove que se x
for um zero de multiplicidade m de um polin omio p, o metodo
de Newton modicado (2.14) converge localmente (quais as condi c oes de convergencia?) e de
forma quadratica para x
.
Para calcular as razes complexas de uma equa c ao algebrica o metodo da bissec c ao n ao
pode ser usado. Quanto ao metodo de Newton (ou o da secante), ele s o convergir a para uma
raiz complexa se a aproxima c ao inicial for um n umero complexo (e se forem satisfeitas as
condi c oes de convergencia), sendo todo o processo realizado com aritmetica complexa. Note-
se que, ap os determinada uma raiz complexa, camos imediatamente a conhecer outra raiz
(a sua conjugada).
Solu c ao numerica de equa c oes e sistemas n ao lineares 39
2.7 Sistemas de equa c oes nao lineares (breve introdu cao)
2.7.1 Introdu cao
Nesta sec c ao vamos descrever, de forma sucinta, a aplica c ao dos metodos do ponto xo em
geral, e do metodo de Newton em particular, ` a resolu c ao numerica de sistemas de equa c oes
n ao lineares.
Consideremos o ponto x = (x
1
, . . . , x
n
) IR
n
e a aplica c ao F, sucientemente regular,
denida por
F : IR
n
IR
n
(x
1
, . . . , x
n
) (f
1
(x
1
, . . . , x
n
), . . . , f
n
(x
1
, . . . , x
n
))
.
E nosso objectivo determinar a solu c ao x
= (x
1
, . . . , x
n
) do sistema de n equa c aoes em n
inc ognitas
_
_
f
1
(x
1
, . . . , x
n
) = 0
.
.
.
.
.
.
f
n
(x
1
, . . . , x
n
) = 0
,
que, noutra nota c ao, pode ser escrito na forma
F(x) = 0, (2.15)
com
x =
_
_
x
1
x
2
.
.
.
x
n
_
_
, F(x) =
_
_
f
1
(x)
f
2
(x)
.
.
.
f
n
(x)
_
_
, 0 =
_
_
0
0
.
.
.
0
_
_
. (2.16)
A resolu c ao de sistemas de equa c oes n ao lineares por processos analticos pode ser bastante
difcil ou mesmo impossvel. Nesse caso temos necessidade de recorrer a metodos numericos
no sentido de obter uma solu c ao aproximada. Iremos considerar metodos iterativos da forma
x
(k+1)
= G(x
(k)
), k = 0, 1, . . . , (2.17)
com
G(x) =
_
_
g
1
(x)
g
2
(x)
.
.
.
g
n
(x)
_
_
, (2.18)
que determinem uma sucess ao de aproxima c oes para uma raiz x
da equa c ao vectorial (2.15),
a partir de uma dada aproxima c ao inicial
x
(0)
=
_
_
x
1
x
2
.
.
.
x
n
_
_
(0)
. (2.19)
Uma quest ao essencial quando se lida com metodos iterativos tem a ver com a convergencia
do processo: dada uma sucess ao de aproxima c oes x
(k)
gerada pelo processo iterativo, como
saber se ela e convergente para a solu c ao x
do sistema? Para denir convergencia temos que
introduzir, previamente, o conceito de norma vectorial.
Solu c ao numerica de equa c oes e sistemas n ao lineares 40
Deni cao 2.35 Uma norma vectorial (real) e uma aplica c ao | | : IR
n
IR
+
0
que verica
1. x IR
n
, |x| = 0 x = 0,
2. x IR
n
, IR, |x| = [[|x|,
3. x, y IR
n
, |x + y| |x| +|y|.
Poderamos denir, de igual modo, normas vectoriais complexas. Deixa-se a constru c ao
dessa deni c ao ao cuidado dos alunos.
Exerccio 2.7.1 Prove que as seguintes fun c oes sao normas vectoriais:
1. Norma 1: x IR
n
, |x|
1
=
n
i=1
[x
i
[.
2. Norma 2 ou norma euclideana: x IR
n
, |x|
2
=
_
n
i=1
x
2
i
_
1/2
.
3. Norma innito ou norma de Chebyshev: x IR
n
, |x|
= max
1in
[x
i
[.
Estamos agora em condi c oes de introduzir o conceito de convergencia de uma sucess ao de
vectores.
Deni cao 2.36 A sucessao de vectores x
(k)
diz-se convergente para x
IR
n
se, para todo
o > 0, existe uma ordem k
0
tal que, para todo o k > k
0
, se tem |x
(k)
x
| < . Nesse caso
escreve-se
lim
k+
x
(k)
= x
.
Apresentemos de seguida o teorema que garante a convergencia de um metodo iterativo
da forma (2.17). Este teorema e uma generaliza c ao do Teorema do Ponto Fixo para sitemas
de equa c oes e a sua demonstra c ao n ao ir a ser considerada.
Teorema 2.37 Seja x
uma solu c ao de (2.15) e 1
x
uma vizinhan ca desse ponto que n ao
contem mais nenhuma raiz da equa c ao vectorial (2.15). Se x
for um ponto xo de G, fun c ao
dada por (2.17)-(2.18), e se
|J
G
(x)| K < 1, x 1
x
,
onde J
G
(x) e a matriz de Jacobi de G
J
G
(x) =
_
_
g
1
x
1
(x)
g
1
x
n
(x)
.
.
.
.
.
.
.
.
.
g
n
x
1
(x)
g
n
x
n
(x)
_
_
,
ent ao o metodo (2.17) converge para x
, qualquer que seja x
(0)
1
x
.
Observa cao 2.38 De notar que a deni c ao e teorema anteriores dependem do conceito de
norma. Uma vez que e possvel considerar v arias normas, uma quest ao legtima seria a de
saber se e possvel que uma sucess ao de vectores convirja quando se considera uma deter-
minada norma e divirja condo se considera outra. Para as normas mais usuais (dadas no
Exerccio 2.7.1) e possvel demonstrar que se uma sucess ao de vectores convergir segundo uma
das normas ela tambem converge quando se considera outra qualquer. Por este facto diz-se
que estamos em presen ca de normas equivalentes.
Solu c ao numerica de equa c oes e sistemas n ao lineares 41
Consideremos agora o problema da deni c ao de criterios de paragem para processos ite-
rativos aplicados ao c alculo das razes de sistemas de equa c oes n ao lineares F(x) = 0.
Seja x
(k)
a sucess ao de aproxima c oes gerada pelo processo iterativo convergente para a
solu c ao x
do sistema. Os criterios de paragem mais frequentes s ao:
1. Criterio do erro absoluto: |x
(k)
x
(k1)
| ;
2. Criterio do erro relativo: |x
(k)
x
(k1)
| |x
(k)
|;
3. Criterio do valor da fun c ao: |F(x
(k)
)|
1
, com
1
;
4. Criterio do n umero m aximo de itera c oes: k = kmax.
Antes de passarmos ` a deni c ao dos processos iterativos vamos considerar o problema da
determina c ao da aproxima c ao inicial que, para sistemas de equa c oes, pode ser um problema
de difcil resolu c ao. Na pr atica existem processos que permitem, a priori, determinar boas
estimativas iniciais para a solu c ao pretendida. Esses processos dependem muito do problema
em quest ao e como tal n ao s ao passveis de um tratamento generalizado.
Existe, no entanto, uma forma de poder obter uma boa aproxima c ao inicial quando os
sistemas s ao de pequena dimens ao. Essa forma e a localiza c ao gr aca. Este processo consiste
na mera generaliza c ao do efectuado na sec c ao anterior e, como tal, n ao iremos fazer a sua
abordagem na forma geral mas sim recorrendo a um exemplo.
Exemplo 2.39 Considere-se o sistema de equa c oes nao lineares
_
x
2
+ y
2
= 1
xy + x = 1
.
Tra cando o graco de f
1
(x, y) = 0 e f
2
(x, y) = 0, com
_
f
1
(x, y) = x
2
+ y
2
1
f
2
(x, y) = xy + x 1
,
vericamos que uma solu cao do sistema e (x, y) = (1, 0) e que a outra esta pr oxima de (x, y)
(0)
=
(1, 1).
-1.5 -1 -0.5 0.5 1 1.5
-4
-3
-2
-1
1
2
x y
+
2 2
= 1
x y + x =1
Figura 2.7: Localiza c ao gr aca.
Solu c ao numerica de equa c oes e sistemas n ao lineares 42
2.7.2 Metodo iterativo de Newton
Seja dado o sistema de equa c oes n ao lineares F(x) = 0 denido por (2.16). Pretendemos
determinar uma aproxima c ao para a raiz x
= (x
1
, . . . , x
n
) do referido sistema sendo dada
uma aproxima c ao inicial (2.19). Suponhamos que F C
2
(1
x
), com 1
x
uma vizinhan ca de
x
. Pela f ormula de Taylor temos que, se x
(0)
1
x
,
F(x
) = F(x
(0)
) + J
F
(x
(0)
)(x
x
(0)
) + ,
onde
J
F
(x) =
_
_
f
1
x
1
(x)
f
1
x
n
(x)
.
.
.
.
.
.
.
.
.
f
n
x
1
(x)
f
n
x
n
(x)
_
_
e a matriz de Jacobi de F no ponto x. Como F(x
) = 0 e supondo
det (J
F
(x)) ,= 0, x 1
x
,
podemos denir, de forma identica ` a sec c ao anterior, o processo iterativo
x
(k+1)
= x
(k)
J
1
F
(x
(k)
)F(x
(k)
), k = 0, 1 . . . ,
que pretendemos que seja convergente para x
. Este processo iterativo e designado por metodo
de Newton ou metodo de Newton-Raphson.
Para provar a convergencia deste processo iterativo, notemos que o metodo de Newton
pode ser escrito na forma (2.17) sendo a fun c ao de itera c ao dada por
G(x) = x J
1
F
(x)F(x). (2.20)
Assim, a convergencia do metodo resulta do Teorema 2.37 de acordo com o pr oximo exerccio.
Exerccio 2.7.2 Prove que o metodo de Newton converge de forma quadratica para a raiz x
de F(x) = 0 se a aproxima cao inicial for escolhida sucientemente pr oxima dessa raiz.
Sugestao: Mostre que J
G
(x) = 0, sendo G a fun cao de itera cao (2.20).
Notemos que o car acter local da convergencia deste metodo nos obriga a ter o cuidado
de escolher uma aproxima c ao inicial que esteja sucientemente pr oxima da solu c ao que per-
tendemos determinar.
Antes de apresentar o algoritmo que traduz o metodo de Newton, notemos que podemos
evitar, em cada itera c ao, o c alculo da matriz inversa J
1
F
(x
(k)
) se zermos
_
_
_
J
F
(x
(k)
)
(k)
= F(x
(k)
)
(k)
= x
(k+1)
x
(k)
. (2.21)
Solu c ao numerica de equa c oes e sistemas n ao lineares 43
Algoritmo 2.7 Metodo de Newton
Ler x
(0)
;
k := 0;
Repetir
Se det (J
F
(x
(k)
)) = 0 ent ao parar;
Resolver J
F
(x
(k)
) = F(x
(k)
);
x
(k+1)
:= x
(k)
+ ;
k := k + 1
ate que ||
1
ou k = kmax;
Escrever x
x
(k)
.
Uma grande desvantagem do metodo de Newton consiste em determinar, em cada itera c ao,
a solu c ao de um sistema de equa c oes lineares diferente. Na pr atica e usual considerar a
mesma matriz de Jacobi em v arias itera c oes ou mesmo durante todo o processo. Nesse caso,
dizemos que estamos na presen ca do metodo de Newton modicado. Existem ainda outras
modica c oes a este metodo (para evitar, por exemplo, o c alculo de n
2
derivadas) mas n ao as
iremos considerar neste curso.
Algoritmo 2.8 Metodo de Newton modicado
Ler x
(0)
;
J
F
:= J
F
(x
(0)
);
Se det (J
F
) = 0 ent ao parar;
k := 0;
Repetir
Resolver J
F
= F(x
(k)
);
x
(k+1)
:= x
(k)
+ ;
k := k + 1
ate que ||
1
ou k = kmax;
Escrever x
x
(k)
.
Exerccio 2.7.3 Melhore os algoritmos anteriores.
Exerccio 2.7.4 Determine uma aproxima cao para a solu cao de
F(x) = 0
_
x
2
+ y
2
1 = 0
xy + x 1 = 0
,
diferente de (1, 0), efectuando duas itera c oes de metodo de Newton. Indique uma estimativa para
o erro cometido.
Solu c ao numerica de equa c oes e sistemas n ao lineares 44
Resolu cao: Seja x
= (x
1
, x
2
) a solu cao pretendida. Como vimos, a aproxima cao inicial pode
ser dada por (x, y)
(0)
= (1, 1).
Para nao sobrecarregar a nota cao consideremos (x, y)
(k)
= (x
k
, y
k
), k = 0, 1, . . .. Como
J
F
(x
k
, y
k
) =
_
2x
k
2y
k
y
k
+ 1 x
k
_
,
temos que
det (J
F
(x
k
, y
k
)) ,= 0 x
2
k
y
2
k
y
k
,= 0.
Apliquemos o metodo de Newton na forma (2.21).
Primeira Itera cao
Como x
2
0
y
2
0
y
0
= 1 ,= 0 podemos efectuar a primeira itera cao do metodo. Assim
_
2x
0
2y
0
y
0
+ 1 x
0
_ _
x
0
y
0
_
=
_
x
2
0
+ y
2
0
1
x
0
y
0
+ x
0
1
_
_
2 2
2 1
_ _
x
0
y
0
_
=
_
1
1
_
.
Daqui sai que
_
x
0
y
0
_
=
_
0.5
0
_
e, como tal,
_
x
1
y
1
_
=
_
0.5
1
_
.
Segunda Itera cao
Como x
2
1
y
2
1
y
1
= 1.75 ,= 0 podemos efectuar a segunda itera cao do metodo.
Assim obtemos, de modo analogo,
_
1 2
2 0.5
_ _
x
1
y
1
_
=
_
0.25
0
_
.
Daqui sai que
_
x
1
y
1
_
=
_
1/28
1/7
_
e, como tal,
_
x
2
y
2
_
=
_
15/28
6/7
_
.
Temos assim que
x
_
15
28
,
6
7
_
= (0.5357, 0.8571),
sendo uma estimativa para o erro cometido dada por
|x
x
(2)
|
|x
(2)
x
(1)
|
= max
_
1
28
,
1
7
_
=
1
7
= 0.1429.
Solu c ao numerica de equa c oes e sistemas n ao lineares 45
2.8 Exerccios de aplica cao `a engenharia
Exerccio 2.8.1 De Santis (1976) deduziu uma rela cao para o factor de compressibilidade dos
gases reais da forma
z =
1 + y + y
2
y
3
(1 y)
3
,
onde y = b/4, sendo b a correc cao de van der Waals e o volume molar. Se z = 0.892 qual o
valor de y?
Exerccio 2.8.2 Baseado no trabalho de Frank-Kamenetski (1955), as temperaturas no interior
de um material com fontes de calor embebidas podem ser determinadas pela equa cao
e
0.5t
cosh (e
0.5t
) =
_
0.5L
er
.
Dado L
er
= 0.088, determine t.
Exerccio 2.8.3 Um medicamento administrado a um doente produz uma concentra cao na
corrente sangunea dada por
c(t) = Ate
t/3
mg/ml
t horas depois de injectadas A unidades. A concentra cao maxima de seguran ca e de 1 mg/ml.
1. Que quantidade deve ser injectada para que seja atingida a concentra cao maxima de segu-
ran ca e em que altura ocorre esse maximo?
2. Uma concentra cao adicional do mesmo medicamento deve ser administrada no doente depois
da concentra cao ter descido para 0.25 mg/ml. Determine quando e que a segunda injec cao
deve ser administrada (em minutos).
3. Assumindo que a concentra cao ap os injec c oes consecutivas e aditiva e que 0.75% da quan-
tidade original injectada e administrada na segunda injec cao, em que altura deve ser dada
a terceira injec cao?
Exerccio 2.8.4 A concentra cao, C, de uma bacteria poluente num lago decresce de acordo
com a expressao
C = 80e
2t
+ 20e
0.1t
,
onde t representa o tempo. Determine o tempo necessario para que a concentra cao de bacterias
que reduzida a 10.
Exerccio 2.8.5 Em engenharia ambiental a equa cao que se segue pode ser usada para calcular
o nvel de oxigenio, c, existente num rio a jusante de um local de descarga de esgoto:
c = 10 15(e
0.1x
e
0.5x
),
em que x representa a distancia a partir do local de descarga. Usando um metodo `a sua escolha,
determine em que local (a partir da descarga) em que o nvel de oxigenio atinge o valor 4.
Sugestao: Sabe-se que o referido local se encontra, no maximo, a 5 km a jusante do local
de descarga.
Solu c ao numerica de equa c oes e sistemas n ao lineares 46
Exerccio 2.8.6 Em engenharia oceanica, a equa cao para a altura de uma determinada onda
num cais e dada por
h = h
0
_
sin
_
2x
_
cos
_
2tv
_
+ e
x
_
.
Determine uma aproxima cao para o valor de x sabendo que h = 0.5h
0
, = 20, t = 10 e v = 50.
Exerccio 2.8.7 Muitos campos da engenharia requerem o conhecimento de estimativas precisas
para o n umero de habitantes de uma determinada regiao. Assim, por exemplo, os engenheiros
das areas dos transportes consideram ser importante saber como varia o n umero de habitantes de
uma cidade e dos seus sub urbios.
Suponhamos que a popula cao de uma determinada zona urbana decresce ao longo do tempo
de acordo com a equa cao
P
u
(t) = P
u,max
e
k
u
t
+ P
u,min
e que a popula cao suburbana cresce ao longo do tempo de acordo com
P
s
(t) =
P
s,max
1 +
_
P
s,max
P
0
1
_
e
k
s
t
,
sendo as constantes P
u,max
, k
u
, P
u,min
, P
s,max
, P
0
e k
s
parametros estimados empiricamente.
Determine o instante t (e os correspondentes valores de P
u
(t) e P
s
(t)) em que as regi oes
urbanas e suburbanas tem o mesmo n umero de habitantes, usando, para tal, os seguintes valores:
P
u,max
= 60000, k
u
= 0.04, P
u,min
= 120000, P
s,max
= 300000, P
0
= 5000 e k
s
= 0.06.
Exerccio 2.8.8 Para calcular a aspecto de uma calha de escoamento, por gravidade, com o
objectivo de minimizar o tempo de descarga de um determinado produto granulado (Chiarella,
Charlton, Roberts (1975)), e necessario resolver as seguintes equa c oes nao lineares pelo metodo
de Newton
_
_
f
n
(
1
, . . . ,
N
)
sin
n+1
v
n+1
(1 w
n+1
)
sin
n
v
n
(1 w
n
) = 0, n = 1, . . . , N 1
f
N
(
1
, . . . ,
N
) y
N
j=1
tan
j
X = 0
,
onde
(i) v
2
n
= v
2
0
+ 2gny 2y
n
j=1
1
cos
j
, n = 1, . . . , N,
e
(ii) w
n
= yv
n
N
j=1
1
v
3
j
cos
j
, n = 1, . . . , N.
A constante v
0
e a velocidade inicial do produto granulado, X a coordenada em x do extremo nal
da calha, a for ca de atrito, N o n umero de segmentos da calha e g a constante de gravidade.
As variaveis
j
sao os angulos que os respectivos segmentos da calha fazem com a vertical e v
j
a
velocidade das partculas no j-esimo segmento da calha.
Resolva o sistema para = (
1
, . . . ,
N
) usando o metodo de Newton com = 0, X = 2,
y = 0.2, N = 20, v
0
= 0, e g = 32 pes/seg
2
, onde os valores de v
n
e w
n
sao dados por (i) e
(ii). Aplique o metodo ate que
|
(k+1)
(k)
| < 10
2
rad.
Solu c ao numerica de equa c oes e sistemas n ao lineares 47
2.9 Referencias bibliogracas
K.E. Atkinson (1989), An Introduction to Numerical Analysis, 2th ed., John Wiley, New
York.
R.L. Burden e J.D. Faires (1988), Numerical Analysis, 4th ed., PWS-Kent, Boston.
S.D. Conte e C. de Boor (1980), Elementary Numerical Analysis, 3th ed., McGraw-Hill, New
York.
H. Goldstine (1977), A History of Numerical Analysis from 16
th
Through the 19
th
Century,
Springer-Verlag, New York.
C. Houzel (1988),
Equations algebriques, Mathematiques en Mediterranee,
Edisud/Musees
de Marseille, pp. 58-67.
J.A. Ferreira e M.F. Patrcio (1999), An alise Numerica, Textos de Apoio, DMUC, Coimbra.
R. Kress (1998), Numerical Analysis, Springer-Verlag, New York.
H. Pina (1995), Metodos Numericos, McGraw-Hill, Alfragide.
J.R. Rice (1983), Numerical Methods, Software, and Analysis, McGraw-Hill, Tokyo.
M. Rosa (1992), T opicos de An alise Numerica, Textos de Apoio, DMUC, Coimbra.
J.M. Sanz-Serna (1998), Diez Lecciones de C alculo Numerico, Universidad de Valladolid,
Valladolid.
J. Stoer e R. Bulirsch (1980), Introduction to Numerical Analysis, Springer-Verlag, Berlin.
M.R. Valen ca (1988), Metodos Numericos, INIC, Braga.
Vous aimerez peut-être aussi
- Corte Arrombamento PDFDocument60 pagesCorte Arrombamento PDFNuno Fmlg NunesPas encore d'évaluation
- Corte Arrombamento PDFDocument60 pagesCorte Arrombamento PDFNuno Fmlg NunesPas encore d'évaluation
- Introducao Processos de Corte PDFDocument41 pagesIntroducao Processos de Corte PDFnien33Pas encore d'évaluation
- Cap 1Document12 pagesCap 1Cesar DesideráPas encore d'évaluation
- TI-Nspire CX Handheld Gettingstarted PTDocument128 pagesTI-Nspire CX Handheld Gettingstarted PTLeandro VitorPas encore d'évaluation
- TI-Nspire Lab Cradle GettingStarted PTDocument28 pagesTI-Nspire Lab Cradle GettingStarted PTNuno Fmlg NunesPas encore d'évaluation
- TI-Nspire Press To Test Guidebook PTDocument38 pagesTI-Nspire Press To Test Guidebook PTNuno Fmlg NunesPas encore d'évaluation
- ElectrotecniaIndustrial IEFPDocument221 pagesElectrotecniaIndustrial IEFPNuno Fmlg NunesPas encore d'évaluation
- Emoções e Sentimentos em InglêsDocument3 pagesEmoções e Sentimentos em InglêsJoninhas MedeirosPas encore d'évaluation
- Cifras SignificativasDocument2 pagesCifras SignificativasbayronPas encore d'évaluation
- Trabalho II Matematica - PedagogiaDocument9 pagesTrabalho II Matematica - PedagogiaJeniffer MirandaPas encore d'évaluation
- Trabalho HebraicoDocument20 pagesTrabalho HebraicoRodrigo FonsecaPas encore d'évaluation
- Portugues CriticoDocument22 pagesPortugues CriticoRodolfo Sena da PenhaPas encore d'évaluation
- Annaes Do Municipio de Oliveira de AzeméisDocument394 pagesAnnaes Do Municipio de Oliveira de Azeméismorganzine100% (1)
- Exercícios Colocação PronominalDocument6 pagesExercícios Colocação PronominaldonyjuniorPas encore d'évaluation
- Utilizacao Do Nestle Aland PDFDocument5 pagesUtilizacao Do Nestle Aland PDFArte Para Cristo0% (1)
- Ae Avaliacao Trimestral2 Port4 Enunciado 2023Document9 pagesAe Avaliacao Trimestral2 Port4 Enunciado 2023gripe APas encore d'évaluation
- Distinção Entre Banda e FanfarraDocument21 pagesDistinção Entre Banda e FanfarraRodgsPas encore d'évaluation
- Signo e PersuasãoDocument4 pagesSigno e PersuasãoPriscila QueirozPas encore d'évaluation
- Exercício de AcetuaçãoDocument18 pagesExercício de AcetuaçãoThais RodriguesPas encore d'évaluation
- Aula 10 - Suficiente X Necessario PDFDocument3 pagesAula 10 - Suficiente X Necessario PDFWellington BatistaPas encore d'évaluation
- Re 82202 Mpal8md Teste7 Versao ADocument16 pagesRe 82202 Mpal8md Teste7 Versao AMafalda Santos100% (1)
- FJ 26 PDFDocument220 pagesFJ 26 PDFLuciano de OliveiraPas encore d'évaluation
- Raciocínio Logico ExcelenciaDocument38 pagesRaciocínio Logico ExcelenciaElaneCardoso100% (1)
- Mudar - Flavio GikovateDocument76 pagesMudar - Flavio GikovateWallysson ImperioPas encore d'évaluation
- Manual de Leitura AntígonaDocument40 pagesManual de Leitura AntígonaLuciano Silva do NascimentoPas encore d'évaluation
- PECS Level 1 Handout - Portuguese - Brazil 2021Document77 pagesPECS Level 1 Handout - Portuguese - Brazil 2021deisyPas encore d'évaluation
- Respostas Introdução À Álgebra AbstrataDocument32 pagesRespostas Introdução À Álgebra AbstrataJoaoPaulo100% (1)
- Resolucao Desafio 5ano Fund2 Portugues 210913Document10 pagesResolucao Desafio 5ano Fund2 Portugues 210913Natalia Braga da Silva50% (2)
- A Perspectiva de Carl Rogers Acerca Da Resposta ReflexaDocument12 pagesA Perspectiva de Carl Rogers Acerca Da Resposta ReflexaMartonio SalesPas encore d'évaluation
- BNCC - Dcgo - Saeb - PortuguêsDocument10 pagesBNCC - Dcgo - Saeb - PortuguêsFernanda GonzagaPas encore d'évaluation
- Saussure-Introdução À Leitura deDocument4 pagesSaussure-Introdução À Leitura dePaulo FinkelPas encore d'évaluation
- INTERTEXTUALIDADEDocument63 pagesINTERTEXTUALIDADEDiego LimaPas encore d'évaluation
- Ap01 Problemas Gerais Da Língua CultaDocument3 pagesAp01 Problemas Gerais Da Língua CultaBruno ReisPas encore d'évaluation
- Construção e Validação de Instrumentos: Um Desafio para A PsicolinguísticaDocument8 pagesConstrução e Validação de Instrumentos: Um Desafio para A PsicolinguísticaCristiane SlugovieskiPas encore d'évaluation
- 30 Dias 30 Minutos Zohar1Document104 pages30 Dias 30 Minutos Zohar1tottys78100% (1)
- Ficha Com GramaticaDocument4 pagesFicha Com GramaticaManuel PenedoPas encore d'évaluation
- Fonema e LetraDocument3 pagesFonema e LetraWalleska Bernardino Silva100% (1)