Vous aimerez peut-être aussi
- 09 FalhasDocument2 pages09 FalhasJanilde Pereira SousaPas encore d'évaluation
- 2 Cole Cao TecnicaDocument2 pages2 Cole Cao TecnicaJanilde Pereira SousaPas encore d'évaluation
- Apostila Refrigeração e Ar CondicionadoDocument122 pagesApostila Refrigeração e Ar Condicionadorogerll1100% (7)
- A história da refrigeração e seus usos desde a antiguidadeDocument134 pagesA história da refrigeração e seus usos desde a antiguidadeLuís Fernando da Silva100% (2)
- CLP Allen BradleyDocument76 pagesCLP Allen Bradleyjuninho4358100% (1)
- 164 - Legislacao Eficiencia EnergeticaDocument1 page164 - Legislacao Eficiencia EnergeticaJanilde Pereira SousaPas encore d'évaluation
- Livro Refrigeracao CastroDocument221 pagesLivro Refrigeracao CastroJanilde Pereira Sousa100% (5)
- Ar CondicionadoDocument25 pagesAr CondicionadoJanilde Pereira SousaPas encore d'évaluation
- Rac IDocument0 pageRac IJanilde Pereira SousaPas encore d'évaluation
- Avaliação Pelo EstagiárioDocument1 pageAvaliação Pelo EstagiárioJanilde Pereira SousaPas encore d'évaluation
- Gestão da manutençãoDocument6 pagesGestão da manutençãoralphsauPas encore d'évaluation
- 2 SessaoDocument9 pages2 SessaoOliverCostaPas encore d'évaluation
- Controle de coluna de destilaçãoDocument88 pagesControle de coluna de destilaçãoClaudemir RibeiroPas encore d'évaluation
- Grupo 5Document9 pagesGrupo 5odiliovieirafilhoPas encore d'évaluation
- Manutenção tipos tendênciasDocument4 pagesManutenção tipos tendênciasEduvânio MachadoPas encore d'évaluation
- Controle de coluna de destilaçãoDocument88 pagesControle de coluna de destilaçãoClaudemir RibeiroPas encore d'évaluation
- Ensaios Mecânicos de Materiais Metálicos - Fundamentos Teóricos e PráticosDocument153 pagesEnsaios Mecânicos de Materiais Metálicos - Fundamentos Teóricos e PráticosJean Paulo Salvati100% (1)
- 2006 Vibrações Parte 2Document12 pages2006 Vibrações Parte 2VQuadrosPas encore d'évaluation
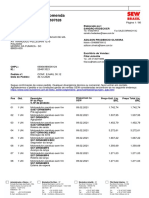
- Confirmação de Encomenda: SEW-EURODRIVE Brasil LtdaDocument80 pagesConfirmação de Encomenda: SEW-EURODRIVE Brasil LtdaMateus das Neves OlímpioPas encore d'évaluation
- Cap 4 ProvaDocument5 pagesCap 4 ProvaEsdras FerrazPas encore d'évaluation
- Receptores elétricos: características e aplicaçõesDocument2 pagesReceptores elétricos: características e aplicaçõesDrielly DanillyPas encore d'évaluation
- Instalação e precauções do amplificador DBS 720Document8 pagesInstalação e precauções do amplificador DBS 720Adriano Camocardi100% (1)
- Caderno de AtividadesDocument99 pagesCaderno de AtividadesRaquel Pereira100% (1)
- Ressonância Harmônica - Você Cria A Sua Própria RealidadeDocument118 pagesRessonância Harmônica - Você Cria A Sua Própria RealidadeMiguelBrandãoPas encore d'évaluation
- (32 ENEM) Cronograma Gratuito de 32 Semanas para o Enem 2024 Com o Ferretto-2Document96 pages(32 ENEM) Cronograma Gratuito de 32 Semanas para o Enem 2024 Com o Ferretto-2vivihgiovannaxPas encore d'évaluation
- A Era de Aquario e o Paraiso Perdido PDFDocument64 pagesA Era de Aquario e o Paraiso Perdido PDFKatia OliveiraPas encore d'évaluation
- Manual Retificadora PÍCCOLADocument6 pagesManual Retificadora PÍCCOLAPaulo João AlvesPas encore d'évaluation
- SIMULADO AV1 e AV2Document56 pagesSIMULADO AV1 e AV2Edney RamosPas encore d'évaluation
- Lista de Exercicios 18Document4 pagesLista de Exercicios 18Bethania NogueiraPas encore d'évaluation
- Teste Fontes SIEMENS SIMODRIVE 611Document2 pagesTeste Fontes SIEMENS SIMODRIVE 611LucasPas encore d'évaluation
- Relatório Sobre Transistores BipolaresDocument40 pagesRelatório Sobre Transistores Bipolarestumor_guitarrista5361100% (2)
- UNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1Document8 pagesUNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1EddyPas encore d'évaluation
- Eletro hidráulica: circuitos, sensores e componentesDocument35 pagesEletro hidráulica: circuitos, sensores e componentesJéssica Papi CarvalhoPas encore d'évaluation
- Apostila - Comandos de Voo IDocument28 pagesApostila - Comandos de Voo IEduardo Barbosa BessaPas encore d'évaluation
- HTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFDocument11 pagesHTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFluis.sinatoPas encore d'évaluation
- Energia cinética e potencial em exercícios físicosDocument4 pagesEnergia cinética e potencial em exercícios físicosRogério CostaPas encore d'évaluation
- Sensores indutivos BES 516-300-S289-BO-D-PU-05Document2 pagesSensores indutivos BES 516-300-S289-BO-D-PU-05Vinicius MonteiroPas encore d'évaluation
- 10 - Lista CinemáticaDocument20 pages10 - Lista CinemáticaPaulinha TorresPas encore d'évaluation
- Máquinas Elétricas I - Lista de ExercíciosDocument6 pagesMáquinas Elétricas I - Lista de ExercíciosIsrael FélixPas encore d'évaluation
- Exercícios MatemáticaDocument4 pagesExercícios MatemáticaAurilene BrasilPas encore d'évaluation
- Cálculo carga guia linearDocument10 pagesCálculo carga guia linearBarbosaSantoPas encore d'évaluation
- Painel solar policristalino 260-340WpDocument2 pagesPainel solar policristalino 260-340WpJose Maria SartoPas encore d'évaluation
- Análise da estabilidade de tensão em sistemas elétricos de potênciaDocument139 pagesAnálise da estabilidade de tensão em sistemas elétricos de potênciaBruno AlvesPas encore d'évaluation
- Exercícios para Revisão - LaboratórioDocument5 pagesExercícios para Revisão - LaboratórioAna Laura Siqueira Miranda100% (3)
- Impulso e Quantidade de MovimentoDocument2 pagesImpulso e Quantidade de MovimentoLucas PhabloPas encore d'évaluation
- Instalacão Econoluz BifasicoDocument2 pagesInstalacão Econoluz BifasicoDenilton Mark CarmelloPas encore d'évaluation
- Energ MecaniDocument50 pagesEnerg MecanisheylageovanePas encore d'évaluation
- 1 Ano Livro 03Document66 pages1 Ano Livro 03lrpz lrpzPas encore d'évaluation