Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Republic Act No. 10121Document4 pagesRepublic Act No. 10121Chuckie BalbuenaPas encore d'évaluation
- The Cold Equations by Tom Godwin SpaceWesterns ComDocument1 pageThe Cold Equations by Tom Godwin SpaceWesterns ComChuckie Balbuena0% (1)
- The Complete Guide To Ripping and Converting Flash Videos - Ripping - LifehackerDocument3 pagesThe Complete Guide To Ripping and Converting Flash Videos - Ripping - LifehackerChuckie BalbuenaPas encore d'évaluation
- Entropy - ScholarpediaDocument15 pagesEntropy - ScholarpediaChuckie BalbuenaPas encore d'évaluation
- Binagoongang AdoboDocument13 pagesBinagoongang AdoboChuckie BalbuenaPas encore d'évaluation
- Mike Tyson Esquire InterviewDocument7 pagesMike Tyson Esquire InterviewChuckie BalbuenaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Howard R700X - SPL - INTDocument44 pagesHoward R700X - SPL - INTJozsefPas encore d'évaluation
- Review1 ScheduleDocument3 pagesReview1 Schedulejayasuryam.ae18Pas encore d'évaluation
- Role of Losses in Design of DC Cable For Solar PV ApplicationsDocument5 pagesRole of Losses in Design of DC Cable For Solar PV ApplicationsMaulidia HidayahPas encore d'évaluation
- Functional DesignDocument17 pagesFunctional DesignRajivSharmaPas encore d'évaluation
- FDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaDocument3 pagesFDA Approves First Gene Therapy, Betibeglogene Autotemcel (Zynteglo), For Beta-ThalassemiaGiorgi PopiashviliPas encore d'évaluation
- Guidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17Document5 pagesGuidelines For SKPMG2 TSSP - Draft For Consultation 10.10.17zqhnazPas encore d'évaluation
- Science7 - q1 - Mod3 - Distinguishing Mixtures From Substances - v5Document25 pagesScience7 - q1 - Mod3 - Distinguishing Mixtures From Substances - v5Bella BalendresPas encore d'évaluation
- Richardson Heidegger PDFDocument18 pagesRichardson Heidegger PDFweltfremdheitPas encore d'évaluation
- Washing Machine: Service ManualDocument66 pagesWashing Machine: Service ManualFernando AlmeidaPas encore d'évaluation
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaDocument25 pagesDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaPas encore d'évaluation
- DC 7 BrochureDocument4 pagesDC 7 Brochures_a_r_r_yPas encore d'évaluation
- Quantitative Methods For Economics and Business Lecture N. 5Document20 pagesQuantitative Methods For Economics and Business Lecture N. 5ghassen msakenPas encore d'évaluation
- The JHipster Mini Book 2Document129 pagesThe JHipster Mini Book 2tyulist100% (1)
- DNA ReplicationDocument19 pagesDNA ReplicationLouis HilarioPas encore d'évaluation
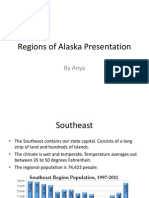
- Regions of Alaska PresentationDocument15 pagesRegions of Alaska Presentationapi-260890532Pas encore d'évaluation
- Product CatalogsDocument12 pagesProduct Catalogscab666Pas encore d'évaluation
- 2SB817 - 2SD1047 PDFDocument4 pages2SB817 - 2SD1047 PDFisaiasvaPas encore d'évaluation
- Companyprofil E: Erfanconstructionsolut IonDocument14 pagesCompanyprofil E: Erfanconstructionsolut IonNurin AleesyaPas encore d'évaluation
- E Flight Journal Aero Special 2018 Small PDFDocument44 pagesE Flight Journal Aero Special 2018 Small PDFMalburg100% (1)
- Application of Graph Theory in Operations ResearchDocument3 pagesApplication of Graph Theory in Operations ResearchInternational Journal of Innovative Science and Research Technology100% (2)
- Lithuania DalinaDocument16 pagesLithuania DalinaStunt BackPas encore d'évaluation
- Law of EvidenceDocument14 pagesLaw of EvidenceIsha ChavanPas encore d'évaluation
- PED003Document1 pagePED003ely mae dag-umanPas encore d'évaluation
- C - Amarjit Singh So Bhura SinghDocument5 pagesC - Amarjit Singh So Bhura SinghRohit JindalPas encore d'évaluation
- Vendor Information Sheet - LFPR-F-002b Rev. 04Document6 pagesVendor Information Sheet - LFPR-F-002b Rev. 04Chelsea EsparagozaPas encore d'évaluation
- 7400 IC SeriesDocument16 pages7400 IC SeriesRaj ZalariaPas encore d'évaluation
- LEIA Home Lifts Guide FNLDocument5 pagesLEIA Home Lifts Guide FNLTejinder SinghPas encore d'évaluation
- PM CH 14Document24 pagesPM CH 14phani chowdaryPas encore d'évaluation
- Gemini Dollar WhitepaperDocument7 pagesGemini Dollar WhitepaperdazeeePas encore d'évaluation
- Hdfs Default XML ParametersDocument14 pagesHdfs Default XML ParametersVinod BihalPas encore d'évaluation