Vous aimerez peut-être aussi
- MANUALDocument15 pagesMANUALBrayan Rodriguez MedranoPas encore d'évaluation
- Cruz Concha Jose Diseño Sistema Riego GoteoDocument89 pagesCruz Concha Jose Diseño Sistema Riego GoteoJuanka Colonio NapaPas encore d'évaluation
- Sistema HidrofloDocument73 pagesSistema HidrofloAndrésSandovalMorantesPas encore d'évaluation
- Proyecto Automatizacion de Bomba de AguaDocument7 pagesProyecto Automatizacion de Bomba de AguaJose Esteban Hdez20% (5)
- Bombas Alternadas y Sistema de RiegoDocument10 pagesBombas Alternadas y Sistema de RiegoCarlos Alberto SilvaPas encore d'évaluation
- Sistema de Control de Nivel de Tanques Acoplados - Control AutomaticoDocument21 pagesSistema de Control de Nivel de Tanques Acoplados - Control AutomaticoPol CardenasPas encore d'évaluation
- Control ComputarizadoDocument9 pagesControl ComputarizadoOsvaldo ReynaPas encore d'évaluation
- Sistemas Hidroneumaticos ProyectoDocument16 pagesSistemas Hidroneumaticos ProyectoGefelix VasquezPas encore d'évaluation
- Modelo de Resumen de ProyectosDocument32 pagesModelo de Resumen de ProyectosNekzcore EvanzPas encore d'évaluation
- Informe Instrumentacion IndustrialDocument16 pagesInforme Instrumentacion IndustrialVictor MellaPas encore d'évaluation
- Informe NavarroDocument9 pagesInforme NavarroCRISTOFHER SHANDEE ANASTACIO CHÁVEZPas encore d'évaluation
- LED y Fototransistor Infrarrojos TIL32 y TIL78Document6 pagesLED y Fototransistor Infrarrojos TIL32 y TIL78FranciscoEndaraPas encore d'évaluation
- Sistema de RiegoDocument10 pagesSistema de RiegoDavid CanazaPas encore d'évaluation
- 3 Control de Una EDARDocument5 pages3 Control de Una EDARMiguel Nallar SaucedoPas encore d'évaluation
- Bombas AlternadasDocument3 pagesBombas Alternadaseberaliaga75% (4)
- Perfil de Proyecto..Document13 pagesPerfil de Proyecto..Trica Sin Limites0% (1)
- Manual Charmilles Robofil 290 by EL TECLASDocument38 pagesManual Charmilles Robofil 290 by EL TECLASabsalon_jarv0% (1)
- MicrocontroladoresDocument25 pagesMicrocontroladoresLudwing Iturbe Ortiz100% (2)
- Fase - 2 - Grupo - 203052 - 14 UltDocument14 pagesFase - 2 - Grupo - 203052 - 14 UltVanessa Fernandez de CastroPas encore d'évaluation
- Proyecto Embotelladora Automatizada Con PLC Primer Informe Control Automatico E InstrumentacionDocument9 pagesProyecto Embotelladora Automatizada Con PLC Primer Informe Control Automatico E Instrumentacionalejandro gonzalezPas encore d'évaluation
- Unidad 1 2 y 3 - Fase 4 - Presentar Resultados Finales PDFDocument25 pagesUnidad 1 2 y 3 - Fase 4 - Presentar Resultados Finales PDFnicolasPas encore d'évaluation
- PLC de Bomabas PDFDocument5 pagesPLC de Bomabas PDFluisPas encore d'évaluation
- Informe de InstrumentacionDocument5 pagesInforme de Instrumentacionzuleimys delgado coronadoPas encore d'évaluation
- Automatizacion de Sistema Tinaco-Cisterna de Una Casa HogarDocument20 pagesAutomatizacion de Sistema Tinaco-Cisterna de Una Casa HogarArOn Lorenzana0% (2)
- Control de NivelDocument5 pagesControl de NivelWilliam Alberto Cochachi PomaPas encore d'évaluation
- Tanque de Agua AutomáticoDocument15 pagesTanque de Agua AutomáticoJose Eduardo Briceño100% (1)
- Banco de Pruebas para Bombas Centrifugas Final 17 AbrilDocument18 pagesBanco de Pruebas para Bombas Centrifugas Final 17 AbrilSebastián Vivas100% (2)
- Introducción A Sistemas de Automatización - Actividad de Aprendizaje 4Document8 pagesIntroducción A Sistemas de Automatización - Actividad de Aprendizaje 4Oscar Santiago Gutierrez MateusPas encore d'évaluation
- Fase 2 Sistemas HidroneumaticosDocument12 pagesFase 2 Sistemas HidroneumaticosYuber ZapataPas encore d'évaluation
- Sistemas HidroneumaticosDocument38 pagesSistemas HidroneumaticosA.j. Vargas100% (1)
- Calculo Sistemas de BombeosDocument19 pagesCalculo Sistemas de BombeosDavid EcheverryPas encore d'évaluation
- Modelado Del SubmarinoDocument2 pagesModelado Del SubmarinoFranklin Jara MoncayoPas encore d'évaluation
- Memorias de Calculo RuralDocument54 pagesMemorias de Calculo RuralCatherine ObandoPas encore d'évaluation
- Medicion de CaudalesDocument10 pagesMedicion de CaudalessmithpierPas encore d'évaluation
- Trabajo de DerflingerDocument13 pagesTrabajo de DerflingerJosue MejiaPas encore d'évaluation
- Simulador de Riego Por GoteoDocument14 pagesSimulador de Riego Por Goteocpajtak1Pas encore d'évaluation
- Antecedentes de PLCDocument58 pagesAntecedentes de PLCAlfredo Hernandez FernandezPas encore d'évaluation
- Manual Charmilles Robofil 290Document38 pagesManual Charmilles Robofil 290Lukas Cabral100% (1)
- Secuencia de Un Sistema NeumáticoDocument5 pagesSecuencia de Un Sistema NeumáticoArmando FreirePas encore d'évaluation
- Manual de Operacion Aci - Ma TruxDocument2 pagesManual de Operacion Aci - Ma TruxAlonso BarbozaPas encore d'évaluation
- FASE 2 Telecontrol Juan Carlos MaestreDocument15 pagesFASE 2 Telecontrol Juan Carlos MaestreErick Machado0% (1)
- Manual de Operación Del Cárcamo Bombeo de Agua Pluvial - 1Document28 pagesManual de Operación Del Cárcamo Bombeo de Agua Pluvial - 1Ruben Flores EliasPas encore d'évaluation
- Proyecto de Fundamentos de Automatización - Grupo 1Document13 pagesProyecto de Fundamentos de Automatización - Grupo 1Jose SolanoPas encore d'évaluation
- Informe Instrumentacion IndustrialDocument15 pagesInforme Instrumentacion IndustrialVictor MellaPas encore d'évaluation
- Informe 10Document19 pagesInforme 10Julio Samavides VargasPas encore d'évaluation
- Diseño de Una Torre de AbsorcionDocument11 pagesDiseño de Una Torre de Absorcioncesariq23Pas encore d'évaluation
- Fase - 2 - Grupo - 203052 - 14 FinalDocument15 pagesFase - 2 - Grupo - 203052 - 14 FinalVanessa Fernandez de CastroPas encore d'évaluation
- Informe de La Visista A PTAR San JeronimoDocument5 pagesInforme de La Visista A PTAR San JeronimokeloniusPas encore d'évaluation
- PLC FinDocument10 pagesPLC Finvideos randomPas encore d'évaluation
- Memoria TecnicaDocument20 pagesMemoria TecnicaPaul OrellanaPas encore d'évaluation
- Pec FinalDocument15 pagesPec FinalAndres Flores SantibañezPas encore d'évaluation
- Act. Modulacion de SistemasDocument3 pagesAct. Modulacion de SistemasOscar BarrientosPas encore d'évaluation
- Control Predictivo Basado en Modelo de Planta de Ósmosis Inversa de LaboratorioDocument10 pagesControl Predictivo Basado en Modelo de Planta de Ósmosis Inversa de LaboratorioDeyvid Jataco AguilarPas encore d'évaluation
- Garcia Coronado Aldryn ManuelDocument12 pagesGarcia Coronado Aldryn ManuelAldryn Garcia CoronadoPas encore d'évaluation
- Spray - Chapter 3 - Redes de AguaDocument73 pagesSpray - Chapter 3 - Redes de AguaSergio HZPas encore d'évaluation
- Examen de Instalaciones SanitariasDocument6 pagesExamen de Instalaciones SanitariasEverth Pauro100% (2)
- Guia de Práctica N°3 Módulo de CaudalDocument27 pagesGuia de Práctica N°3 Módulo de Caudaljerson saucedo delgadoPas encore d'évaluation
- Operacion y Mantenimiento-Aduccion (SEDAPAL)Document30 pagesOperacion y Mantenimiento-Aduccion (SEDAPAL)NorvatorPas encore d'évaluation
- Fase4 Grupo6Document23 pagesFase4 Grupo6Alejandro SantosPas encore d'évaluation
- Manipulación y ensamblaje de tuberías. IMAI0108D'EverandManipulación y ensamblaje de tuberías. IMAI0108Pas encore d'évaluation
- Programa Taller de Investigación IDocument10 pagesPrograma Taller de Investigación ILaura López VelaPas encore d'évaluation
- Planteamiento Del Problema1Document1 pagePlanteamiento Del Problema1Cesar Toledo SarabiaPas encore d'évaluation
- Itsal Ac Po 004 01 Aca Elec6Document2 pagesItsal Ac Po 004 01 Aca Elec6Cesar Toledo SarabiaPas encore d'évaluation
- Planteamiento Del ProlemaDocument1 pagePlanteamiento Del ProlemaCesar Toledo SarabiaPas encore d'évaluation
- Ejercicios para Resolver Del Equipo 4 Tema Justificacion Del Proyecto 1Document2 pagesEjercicios para Resolver Del Equipo 4 Tema Justificacion Del Proyecto 1Cesar Toledo SarabiaPas encore d'évaluation
- ANEXO ElectroValvulasDocument24 pagesANEXO ElectroValvulasCesar Toledo SarabiaPas encore d'évaluation
- JUSTIFICACIÓ1Document1 pageJUSTIFICACIÓ1Cesar Toledo SarabiaPas encore d'évaluation
- Villalobos Aquino Antonio Avance 5 Marco TeoricoDocument54 pagesVillalobos Aquino Antonio Avance 5 Marco TeoricoCesar Toledo SarabiaPas encore d'évaluation
- Expocicion JuetificacionDocument9 pagesExpocicion JuetificacionCesar Toledo SarabiaPas encore d'évaluation
- HIPÓTESISDocument1 pageHIPÓTESISCesar Toledo SarabiaPas encore d'évaluation
- Objetiv OsDocument1 pageObjetiv OsCesar Toledo SarabiaPas encore d'évaluation
- ITSAL AC PO 003 01 Taller1 ElecDocument6 pagesITSAL AC PO 003 01 Taller1 ElecCesar Toledo SarabiaPas encore d'évaluation
- Sintesis Del Tema 1.5. - Cesar Toledo Sarabia 1Document7 pagesSintesis Del Tema 1.5. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Trabajo de Investigacion Tema 1.5. - Cesar Toledo Sarabia 1Document21 pagesTrabajo de Investigacion Tema 1.5. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Mapa Mental. - Cesar Toledo Sarabia 1Document1 pageMapa Mental. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Propuesta Del ProyectoDocument2 pagesPropuesta Del ProyectoCesar Toledo SarabiaPas encore d'évaluation
- Trabajo de Investigacion II. - Cesar Toledo Sarabia 1Document16 pagesTrabajo de Investigacion II. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Ensayo de Una Serie Toledo Sarabia Cesar 1Document2 pagesEnsayo de Una Serie Toledo Sarabia Cesar 1Cesar Toledo SarabiaPas encore d'évaluation
- Tipos de Investigacion. - Cesar Toledo Sarabia 1Document12 pagesTipos de Investigacion. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Cuestionario. - Cesar Toledo Sarabia 1Document4 pagesCuestionario. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Programa Taller de Investigación IDocument10 pagesPrograma Taller de Investigación ILaura López VelaPas encore d'évaluation
- Reporte de Expoosicion. - Cesar Toledo Sarabia 1Document2 pagesReporte de Expoosicion. - Cesar Toledo Sarabia 1Cesar Toledo SarabiaPas encore d'évaluation
- Daños Por Sobrecargas17.07.21Document52 pagesDaños Por Sobrecargas17.07.21Danitza Rosario Sucasaca MamaniPas encore d'évaluation
- Consideraciones para La Construccion de Objetivos EducacionalesDocument3 pagesConsideraciones para La Construccion de Objetivos EducacionalesCarvajal OrianaPas encore d'évaluation
- 2Document7 pages2Floyd BarretPas encore d'évaluation
- Trastornos Del Lenguaje OralDocument6 pagesTrastornos Del Lenguaje OralLuis Lara ArizaPas encore d'évaluation
- Disney y La Terapia de Aceptación y Compromiso (ACT) - PsycienciaDocument8 pagesDisney y La Terapia de Aceptación y Compromiso (ACT) - PsycienciaDiana BarreraPas encore d'évaluation
- Normas para La Elaboración Del InformeDocument13 pagesNormas para La Elaboración Del InformeCarlos JuniorPas encore d'évaluation
- Sesión de Antecesor-SucesorDocument2 pagesSesión de Antecesor-SucesorANELIT VARGAS CAROPas encore d'évaluation
- RESPUESTAS de Potenciacion y Radicacion Con Enteros 3er AnoDocument4 pagesRESPUESTAS de Potenciacion y Radicacion Con Enteros 3er Anopiop15897Pas encore d'évaluation
- Jugando A Ser Cristiano 3Document11 pagesJugando A Ser Cristiano 3MANUEL HIGUERAPas encore d'évaluation
- Memorias de Un Emigrante Imagenes y Conf PDFDocument16 pagesMemorias de Un Emigrante Imagenes y Conf PDFJuve RomeroPas encore d'évaluation
- Perfil Del Egrsado de Segundo GradoDocument3 pagesPerfil Del Egrsado de Segundo GradoLennys Goodyn100% (2)
- EntarioDocument2 pagesEntarioicarabantes100% (3)
- Literatura Griega (Apuntes)Document26 pagesLiteratura Griega (Apuntes)juanjbpPas encore d'évaluation
- TEMA 3 AN ComputacionalDocument6 pagesTEMA 3 AN ComputacionalFer CibeauPas encore d'évaluation
- Tarea 2 Filosofia GeneralDocument11 pagesTarea 2 Filosofia GeneralAleyssa EscalantePas encore d'évaluation
- Memoria Tecnica ServerDocument12 pagesMemoria Tecnica ServerAriel Hernandez CortezPas encore d'évaluation
- Exposicion WordDocument19 pagesExposicion WordEver J.L.Pas encore d'évaluation
- Trabajo Gauss SeidelDocument23 pagesTrabajo Gauss SeidelJorge Jd100% (1)
- 07 Intro EDP y Separacion VariablesDocument32 pages07 Intro EDP y Separacion VariablesCarla RamirezPas encore d'évaluation
- Crecimiento y Desarrollo Esfera SocialDocument8 pagesCrecimiento y Desarrollo Esfera SocialJoanne EscobarPas encore d'évaluation
- PLSQL 6 2 SG - En.esDocument20 pagesPLSQL 6 2 SG - En.esDarwin BetancourthPas encore d'évaluation
- Instrumento de Evaluación - Aprendemos Con Los Cuentos - EducadorassosDocument7 pagesInstrumento de Evaluación - Aprendemos Con Los Cuentos - EducadorassosDenisse RodzherPas encore d'évaluation
- Fe en La Mente PDFDocument16 pagesFe en La Mente PDFherrerafaridPas encore d'évaluation
- Definición de Inteligencias MúltiplesDocument6 pagesDefinición de Inteligencias Múltiplesfelipao15Pas encore d'évaluation
- Qué Lenguaje de Programación Debería Aprender para EmpezarDocument6 pagesQué Lenguaje de Programación Debería Aprender para EmpezarFreddy SilvaPas encore d'évaluation
- Evaluación Teórica 1 - Trujillo - T1at - 00 - Elvis PortillaDocument3 pagesEvaluación Teórica 1 - Trujillo - T1at - 00 - Elvis PortillaGilmer Miguel Chapoñan Juárez100% (3)
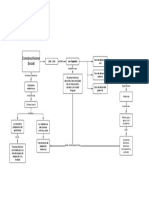
- Constructivismo SocialDocument1 pageConstructivismo SocialMiguel GuamánPas encore d'évaluation
- El Matriarcalismo Vasco - Ciencia y ExistenciaDocument24 pagesEl Matriarcalismo Vasco - Ciencia y Existenciaraymondnomyar100% (1)
- OfiCio Del EstudianteDocument8 pagesOfiCio Del EstudianteMatias BucaloPas encore d'évaluation
- EUFEMISMODocument5 pagesEUFEMISMOFelipe Ramirez CardozoPas encore d'évaluation