Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
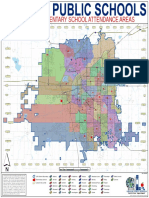
- Lincoln Elementary MapDocument1 pageLincoln Elementary Mapantonio_forgionePas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The Increasing Dot Plot and Arc DiagramsDocument7 pagesThe Increasing Dot Plot and Arc Diagramsantonio_forgionePas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 2013 Fruit Share Is Sold OUTDocument2 pages2013 Fruit Share Is Sold OUTantonio_forgionePas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- ECO2S Validation ReportDocument6 pagesECO2S Validation Reportantonio_forgionePas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- EddyPro5 Getting StartedDocument4 pagesEddyPro5 Getting Startedantonio_forgionePas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Egu2009 5547Document1 pageEgu2009 5547antonio_forgionePas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- ReadmeDocument3 pagesReadmeClaus MenaPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- AGU Friday Daily NewspaperDocument56 pagesAGU Friday Daily Newspaperantonio_forgionePas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- EddyPro5 User GuideDocument297 pagesEddyPro5 User Guideantonio_forgione100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- AlbenizDocument10 pagesAlbenizSteve CarruthersPas encore d'évaluation
- Mathed 1Document9 pagesMathed 1antonio_forgionePas encore d'évaluation
- Asaf Et Al 2013-NGEODocument5 pagesAsaf Et Al 2013-NGEOantonio_forgionePas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Egu2010 13937Document1 pageEgu2010 13937antonio_forgionePas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Egu2011 9984Document1 pageEgu2011 9984antonio_forgionePas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Point of No Return: The Massive Climate Threats We Must AvoidDocument60 pagesPoint of No Return: The Massive Climate Threats We Must AvoidGreenpeace Australia PacificPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Configure & Diagnose Radio NetworksDocument2 pagesConfigure & Diagnose Radio Networksantonio_forgionePas encore d'évaluation
- Pump in Style Battery Pack Instructions: Important SafeguardsDocument2 pagesPump in Style Battery Pack Instructions: Important Safeguardsantonio_forgionePas encore d'évaluation
- The Evolution of Data Collection For Gas Measurement - FINAL (Website)Document8 pagesThe Evolution of Data Collection For Gas Measurement - FINAL (Website)antonio_forgionePas encore d'évaluation
- M (ZD (Cx-5: Smart Start GuideDocument42 pagesM (ZD (Cx-5: Smart Start Guideantonio_forgionePas encore d'évaluation
- Unisonic Technologies Co.,: Low Voltage Audio Power AmplifierDocument7 pagesUnisonic Technologies Co.,: Low Voltage Audio Power Amplifierantonio_forgionePas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Moonlight On The Ocean Cherry, J. W. Weiland, Francis Carpenter, J. E. Notated Music Songs With GuitarDocument5 pagesMoonlight On The Ocean Cherry, J. W. Weiland, Francis Carpenter, J. E. Notated Music Songs With Guitarantonio_forgionePas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Vs10Xx Appnote: Connecting Analog OutputsDocument10 pagesVs10Xx Appnote: Connecting Analog Outputsantonio_forgionePas encore d'évaluation
- IMSLP13264-Hummel - Pot-Pourri For Guitar and Piano Op.53Document13 pagesIMSLP13264-Hummel - Pot-Pourri For Guitar and Piano Op.53antonio_forgionePas encore d'évaluation
- An Analysis of Mario Castelnuovo-Tedescos Vogelweide - Song CycleDocument95 pagesAn Analysis of Mario Castelnuovo-Tedescos Vogelweide - Song Cycleantonio_forgione100% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- IMSLP21371 PMLP11026 Scarlatti SonatasK051 100Document1 pageIMSLP21371 PMLP11026 Scarlatti SonatasK051 100antonio_forgionePas encore d'évaluation
- Violin Partita No2 BWV1004 1 Allemade - 2Document2 pagesViolin Partita No2 BWV1004 1 Allemade - 2antonio_forgionePas encore d'évaluation
- 2013 ScheduleDocument2 pages2013 Scheduleantonio_forgionePas encore d'évaluation
- Fosdem2013 cpp11Document51 pagesFosdem2013 cpp11antonio_forgionePas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Why UI: Using Goal Networks To Improve User InterfacesDocument4 pagesThe Why UI: Using Goal Networks To Improve User Interfacesantonio_forgionePas encore d'évaluation
- Mikrotik Routeros™ V3.0: Reference ManualDocument302 pagesMikrotik Routeros™ V3.0: Reference Manualvj-arifPas encore d'évaluation
- Alcatel Lucent Solutions and LTE Presentation PDFDocument119 pagesAlcatel Lucent Solutions and LTE Presentation PDFVaradaraj ShastryPas encore d'évaluation
- RC Ds Iscom Ht803g-Ua (Rel 01)Document5 pagesRC Ds Iscom Ht803g-Ua (Rel 01)Ahmad MuzayyinPas encore d'évaluation
- NOWA Price ListDocument2 pagesNOWA Price Listsunny_nsecPas encore d'évaluation
- Examens National 2bac en 2017 NDocument7 pagesExamens National 2bac en 2017 NSalah EddinePas encore d'évaluation
- Basics of CryptocurrencyDocument53 pagesBasics of CryptocurrencyAnonymous WKGhtqPas encore d'évaluation
- Atm&Ip Dual Stack (Ran16.0 - 01)Document54 pagesAtm&Ip Dual Stack (Ran16.0 - 01)hekriPas encore d'évaluation
- Tsung - ManualDocument108 pagesTsung - ManualstrokenfilledPas encore d'évaluation
- HCIA-Datacom V1.0 Equipment ListDocument14 pagesHCIA-Datacom V1.0 Equipment ListmeditarukPas encore d'évaluation
- NB 06 Cat9500 Ser Data Sheet Cte enDocument51 pagesNB 06 Cat9500 Ser Data Sheet Cte enJuntosCrecemosPas encore d'évaluation
- Moc 20532 Developing Microsoft Azure Solutions: Course OutlineDocument4 pagesMoc 20532 Developing Microsoft Azure Solutions: Course Outlinepriya_psalmsPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Implementing Cisco Collaboration Core Technologies v1.0 (CLCOR)Document56 pagesImplementing Cisco Collaboration Core Technologies v1.0 (CLCOR)SmithPas encore d'évaluation
- Atn 910iDocument20 pagesAtn 910iRaza RizviPas encore d'évaluation
- Mobile Generations1Document7 pagesMobile Generations1nilanjan1969Pas encore d'évaluation
- Shared Memory ArchitectureDocument39 pagesShared Memory Architectureอภิเษก หงษ์วิทยากรPas encore d'évaluation
- Cloud Computing Is The Delivery ofDocument15 pagesCloud Computing Is The Delivery ofLuis RodriguesPas encore d'évaluation
- Dokumen - Tips Chfi v3 Sample Test QuestionsDocument32 pagesDokumen - Tips Chfi v3 Sample Test QuestionsImran KhanPas encore d'évaluation
- The Ribbon Communications SBC 1000™ Session Border ControllerDocument4 pagesThe Ribbon Communications SBC 1000™ Session Border ControllerHary RatraPas encore d'évaluation
- GFJDocument4 pagesGFJucuchaPas encore d'évaluation
- AP3917E.wing 5 9 1 System Reference Guide Part 1 3831157Document467 pagesAP3917E.wing 5 9 1 System Reference Guide Part 1 3831157Văn HảiPas encore d'évaluation
- CMMP-AS-C5-11A-P3-M0 Motor Controller Data SheetDocument2 pagesCMMP-AS-C5-11A-P3-M0 Motor Controller Data SheetRupesh IrkarPas encore d'évaluation
- Web Technologies Unit 1-5 PDFDocument139 pagesWeb Technologies Unit 1-5 PDFBabu SelvarajPas encore d'évaluation
- Essbase Rules FilesDocument15 pagesEssbase Rules FilessatyaqwePas encore d'évaluation
- Subject - Gs - Redacted PDFDocument369 pagesSubject - Gs - Redacted PDFNickMillerPas encore d'évaluation
- Cv32223683 Hogr Fatih Telecommunication EngineerDocument3 pagesCv32223683 Hogr Fatih Telecommunication EngineerHogr RgohPas encore d'évaluation
- RSLogix5000 Design and Configuration SoftwareDocument29 pagesRSLogix5000 Design and Configuration Softwareensi116Pas encore d'évaluation
- Lab 6: Quality of Service: DCNI-2Document20 pagesLab 6: Quality of Service: DCNI-2h3d0nistPas encore d'évaluation
- WSDL2 WsDocument5 pagesWSDL2 WsgarcamePas encore d'évaluation
- DCM750 IPTV Gateway IP Protocol Conversion ScenariosDocument3 pagesDCM750 IPTV Gateway IP Protocol Conversion Scenariosandres parraPas encore d'évaluation
- Alcatel LucentDocument158 pagesAlcatel LucentTomta FranckPas encore d'évaluation
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsD'EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsPas encore d'évaluation
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationD'EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationPas encore d'évaluation
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireD'EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpirePas encore d'évaluation
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)D'EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Pas encore d'évaluation
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)D'EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Évaluation : 4 sur 5 étoiles4/5 (4)
- CEH Certified Ethical Hacker Practice Exams, Third EditionD'EverandCEH Certified Ethical Hacker Practice Exams, Third EditionPas encore d'évaluation