Vous aimerez peut-être aussi
- Function: 'Sor Error: Matrix Dimensions and Vector Dimension Not Compatible'Document2 pagesFunction: 'Sor Error: Matrix Dimensions and Vector Dimension Not Compatible'ozbakPas encore d'évaluation
- S DixitDocument57 pagesS DixitRushi GorePas encore d'évaluation
- This Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)Document5 pagesThis Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)YohannesPas encore d'évaluation
- Gauss-Seidel Itration MethodDocument2 pagesGauss-Seidel Itration MethodNayli AthirahPas encore d'évaluation
- UntitledDocument6 pagesUntitledmaremqlo54Pas encore d'évaluation
- Matlab Script FileDocument8 pagesMatlab Script Filetvr123Pas encore d'évaluation
- Math 542 Numerical Solutions of Differential EquationsDocument34 pagesMath 542 Numerical Solutions of Differential EquationsTaner YenerPas encore d'évaluation
- Successive OverDocument5 pagesSuccessive OverYohannesPas encore d'évaluation
- Dept. of Mechanical Engg. Dronacharya College of Engg. AntcDocument18 pagesDept. of Mechanical Engg. Dronacharya College of Engg. AntcRahil AndleebPas encore d'évaluation
- Matlab Practice DSP LabDocument10 pagesMatlab Practice DSP LabPrudhvi MunagalaPas encore d'évaluation
- CchelpDocument119 pagesCchelpLaco tangara JhuniorPas encore d'évaluation
- Matlab Fundamentals: Computer-Aided ManufacturingDocument47 pagesMatlab Fundamentals: Computer-Aided ManufacturingAyub PadaniaPas encore d'évaluation
- MATLAB Source Codes Otsu Thresholding Method: All 'Angiogram1 - Gray - JPG'Document10 pagesMATLAB Source Codes Otsu Thresholding Method: All 'Angiogram1 - Gray - JPG'Mohammed AlmalkiPas encore d'évaluation
- EE364a Homework 7 SolutionsDocument16 pagesEE364a Homework 7 SolutionsNeeraj YadavPas encore d'évaluation
- Linear ConvolutionDocument17 pagesLinear ConvolutionRahul DeshpandePas encore d'évaluation
- PRACTICAL Assigement 5Document15 pagesPRACTICAL Assigement 5Umer MasoodPas encore d'évaluation
- M.E CS-1 Lab ManualDocument78 pagesM.E CS-1 Lab Manualselvaece2010Pas encore d'évaluation
- Matlab TipsDocument14 pagesMatlab Tipsfilip100Pas encore d'évaluation
- Lab 04 Eigen Value Partial Pivoting and Elimination PDFDocument12 pagesLab 04 Eigen Value Partial Pivoting and Elimination PDFUmair Ali ShahPas encore d'évaluation
- N (^x ; ^ μ, ∑) = ∑∨ e ∑=covariance: %Load the hogg datasetDocument28 pagesN (^x ; ^ μ, ∑) = ∑∨ e ∑=covariance: %Load the hogg datasetKelbie DavidsonPas encore d'évaluation
- Matlab ExamDocument25 pagesMatlab ExamAliceAlormenuPas encore d'évaluation
- 21 Eng 143Document19 pages21 Eng 143Udana ThenuwaraPas encore d'évaluation
- Gauss SeidelDocument1 pageGauss SeidelLoginmodePas encore d'évaluation
- Matlab Program For Gauss Elimination Method With Partial PivotingDocument6 pagesMatlab Program For Gauss Elimination Method With Partial PivotingDinesh JangraPas encore d'évaluation
- Example From SlidesDocument17 pagesExample From SlidesShintaPas encore d'évaluation
- Numerical Methods and Probability AssignmentDocument5 pagesNumerical Methods and Probability AssignmentMinal FatymaPas encore d'évaluation
- Matlab HW PDFDocument3 pagesMatlab HW PDFMohammed AbdulnaserPas encore d'évaluation
- Linear System of Equations: Gauss Elimination MethodDocument12 pagesLinear System of Equations: Gauss Elimination MethodsrkhougangPas encore d'évaluation
- The Jacobi Method: Susanne Brenner and Li-Yeng Sung (Modified by Douglas B. Meade) Department of MathematicsDocument2 pagesThe Jacobi Method: Susanne Brenner and Li-Yeng Sung (Modified by Douglas B. Meade) Department of MathematicsjimakosjpPas encore d'évaluation
- Implementation in Matlab of Differential EvolutionDocument26 pagesImplementation in Matlab of Differential EvolutionJuan Alex Arequipa ChecaPas encore d'évaluation
- Fundamental Signal Processing ExerciseDocument7 pagesFundamental Signal Processing ExerciseAdang PriantoPas encore d'évaluation
- Wxmaxima File - WXMXDocument24 pagesWxmaxima File - WXMXSneha KBPas encore d'évaluation
- Matlab QuestionsDocument9 pagesMatlab QuestionsNimal_V_Anil_2526100% (2)
- Name: Masood Salik BSEE-14-18 Convergence / Existence of DTFT and Gibbs PhenomenonDocument5 pagesName: Masood Salik BSEE-14-18 Convergence / Existence of DTFT and Gibbs PhenomenonAmina TabassumPas encore d'évaluation
- CME362 Programming AssignmentDocument15 pagesCME362 Programming AssignmentstonehoffPas encore d'évaluation
- Matlab Program For Gauss Elimination MethodDocument6 pagesMatlab Program For Gauss Elimination MethodDinesh JangraPas encore d'évaluation
- Ece503 ps04Document5 pagesEce503 ps04Rushabh MehtaPas encore d'évaluation
- Applied Numerical Techniques and Comp. ME-319-E: Lab ManualDocument0 pageApplied Numerical Techniques and Comp. ME-319-E: Lab ManualManupriya HasijaPas encore d'évaluation
- Komnum UASDocument8 pagesKomnum UASRusli NurdinPas encore d'évaluation
- Matlab Examples AE470Document24 pagesMatlab Examples AE470JonyLopezPas encore d'évaluation
- HW #2Document7 pagesHW #2sshanbhagPas encore d'évaluation
- Matlab Codes To Be PrintedDocument3 pagesMatlab Codes To Be PrintedsunilvasudevaPas encore d'évaluation
- Guia Nro 06: Sistema de Ecuaciones Directo: FunctionDocument4 pagesGuia Nro 06: Sistema de Ecuaciones Directo: FunctionMary Saavedra ContrerasPas encore d'évaluation
- Appendix B MATLAB® PROGRAMS PDFDocument16 pagesAppendix B MATLAB® PROGRAMS PDFcassindromePas encore d'évaluation
- 8.integration by Numerical MethodDocument7 pages8.integration by Numerical Methodمحمد اسماعيل يوسفPas encore d'évaluation
- MathematicsDocument10 pagesMathematicsJain PradeepPas encore d'évaluation
- DSP Lab 1 PDFDocument10 pagesDSP Lab 1 PDFSaif HassanPas encore d'évaluation
- DSP ProgramDocument118 pagesDSP ProgramSandeep Banerjee100% (1)
- Primer Examen Parcial (1/2016) Programación y Análisis Numérico (PRQ 404)Document4 pagesPrimer Examen Parcial (1/2016) Programación y Análisis Numérico (PRQ 404)CelsoNadinPas encore d'évaluation
- Awesomebump V1.0: 1 Height To Normal ConversionDocument7 pagesAwesomebump V1.0: 1 Height To Normal ConversionAprian Rudina SukmaPas encore d'évaluation
- Mean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsDocument5 pagesMean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsJUVERIA N ZPas encore d'évaluation
- DSP Manual 1Document138 pagesDSP Manual 1sunny407Pas encore d'évaluation
- Assignment 2Document6 pagesAssignment 2Hamza Ahmed WajeehPas encore d'évaluation
- Matlab CodesDocument12 pagesMatlab CodeshazoorbukhshPas encore d'évaluation
- Hmwk01 APAM4300Document14 pagesHmwk01 APAM4300Renzo Alexander Montoya MoralesPas encore d'évaluation
- Lecture 5: Wavefront Reconstruction and Prediction: P.r.fraanje@tudelft - NLDocument136 pagesLecture 5: Wavefront Reconstruction and Prediction: P.r.fraanje@tudelft - NLPhuc PhanPas encore d'évaluation
- Nonlinear Control Feedback Linearization Sliding Mode ControlD'EverandNonlinear Control Feedback Linearization Sliding Mode ControlPas encore d'évaluation
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"D'EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Évaluation : 2.5 sur 5 étoiles2.5/5 (2)
- 2020 YISS - 4 Week - KOREAN (1) - Dongsook KimDocument2 pages2020 YISS - 4 Week - KOREAN (1) - Dongsook KimZia SilverPas encore d'évaluation
- 2020 YISS - Beginning Korean Language IDocument3 pages2020 YISS - Beginning Korean Language IZia SilverPas encore d'évaluation
- Silabus Sekolah UI - UXDocument9 pagesSilabus Sekolah UI - UXMochamad IbnuPas encore d'évaluation
- 2020 YISS - 4 Week - KOREAN (1) - Dongsook KimDocument2 pages2020 YISS - 4 Week - KOREAN (1) - Dongsook KimZia SilverPas encore d'évaluation
- Math HL Formula Booklet 2015 VersionDocument15 pagesMath HL Formula Booklet 2015 VersionChangPas encore d'évaluation
- 2020 YISS - Beginning Korean Language IIDocument3 pages2020 YISS - Beginning Korean Language IIZia SilverPas encore d'évaluation
- 2020 YISS - Beginning Korean Language IDocument3 pages2020 YISS - Beginning Korean Language IZia SilverPas encore d'évaluation
- 0580 w14 Ms 12Document4 pages0580 w14 Ms 12Haider Ali50% (2)
- 0580 w14 Ms 21Document4 pages0580 w14 Ms 21Haider Ali100% (1)
- 0580 w14 Ms 23Document4 pages0580 w14 Ms 23Haider Ali100% (3)
- 0580 w14 Ms 23Document4 pages0580 w14 Ms 23Haider Ali100% (3)
- 0580 w14 Ms 22Document5 pages0580 w14 Ms 22Haider Ali50% (2)
- 0580 w14 Ms 12Document4 pages0580 w14 Ms 12Haider Ali50% (2)
- 0580 w14 Ms 23Document4 pages0580 w14 Ms 23Haider Ali100% (3)
- Mathematics 2019: Online SampleDocument1 pageMathematics 2019: Online SampleZia SilverPas encore d'évaluation
- 0580 w14 Ms 21Document4 pages0580 w14 Ms 21Haider Ali100% (1)
- 0580 w14 Ms 21Document4 pages0580 w14 Ms 21Haider Ali100% (1)
- Applications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Document1 pageApplications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Zia Silver100% (1)
- Form Surat Dan Absen CutiDocument1 pageForm Surat Dan Absen CutiZia SilverPas encore d'évaluation
- 0580 w14 Ms 12Document4 pages0580 w14 Ms 12Haider Ali50% (2)
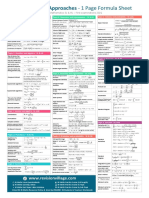
- Analysis and Approaches 1 Page Formula Sheet PDFDocument1 pageAnalysis and Approaches 1 Page Formula Sheet PDFZia SilverPas encore d'évaluation
- 2012 Natural Sciences Test-421Document14 pages2012 Natural Sciences Test-421amandashn96Pas encore d'évaluation
- Applications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Document1 pageApplications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Zia Silver100% (1)
- IMO2015SLDocument83 pagesIMO2015SLHimansu Mookherjee100% (1)
- FT MBA Questionnaire Young Leader Scholarship 2014Document1 pageFT MBA Questionnaire Young Leader Scholarship 2014Zia SilverPas encore d'évaluation
- New Text DocumentDocument1 pageNew Text DocumentZia SilverPas encore d'évaluation
- Practice Test E Section 2 Structure and Written ExpressionDocument8 pagesPractice Test E Section 2 Structure and Written ExpressionZia SilverPas encore d'évaluation
- Gradbull MATH UTAH EDU PDFDocument68 pagesGradbull MATH UTAH EDU PDFZia SilverPas encore d'évaluation
- Hult MBA BrochureDocument64 pagesHult MBA BrochureZia SilverPas encore d'évaluation
- Bali - Bps.go - Id Series Data Tampil Data SeriesDocument7 pagesBali - Bps.go - Id Series Data Tampil Data SeriesZia SilverPas encore d'évaluation
- Design Amp Analysis of Algorithm Multiple Choice QuestionsDocument3 pagesDesign Amp Analysis of Algorithm Multiple Choice QuestionsemirPas encore d'évaluation
- UTSP-Part IV (Compatibility Mode)Document91 pagesUTSP-Part IV (Compatibility Mode)reddy hrithikPas encore d'évaluation
- Discrete Mathematics - Wikipedia PDFDocument8 pagesDiscrete Mathematics - Wikipedia PDFjflksdfjlkaPas encore d'évaluation
- MATH-6 Q2 Mod12Document13 pagesMATH-6 Q2 Mod12KC GaytanoPas encore d'évaluation
- Algebraic Expressions: Lesson 1Document22 pagesAlgebraic Expressions: Lesson 1ALongPas encore d'évaluation
- Fermats Last Theorem Basic Tools by Takeshi SaitoDocument220 pagesFermats Last Theorem Basic Tools by Takeshi SaitoSaman Darvish100% (1)
- 4885 - Batch 5 6 7 Algebra 1 Dated 8-9-18Document12 pages4885 - Batch 5 6 7 Algebra 1 Dated 8-9-18Ankita GuptaPas encore d'évaluation
- Assignment 1Document11 pagesAssignment 1Brooke TylerPas encore d'évaluation
- Essentials of MetaheuristicsDocument253 pagesEssentials of MetaheuristicsteuapPas encore d'évaluation
- Grade 4 Week 2 (Q2)Document37 pagesGrade 4 Week 2 (Q2)dennis davidPas encore d'évaluation
- WTW114 LimitsDocument61 pagesWTW114 LimitsMokhampanyane RamokalelaPas encore d'évaluation
- MathsDocument66 pagesMathsKousik Mandal40% (10)
- Semester 1 Exam ReviewDocument2 pagesSemester 1 Exam ReviewsdenoyerPas encore d'évaluation
- Ial Maths Pure 4 CR4Document15 pagesIal Maths Pure 4 CR4nasehaPas encore d'évaluation
- Identifying Areas Under The Normal CurveDocument18 pagesIdentifying Areas Under The Normal CurveRandolf A. Dineros50% (2)
- Control Allocation - A SurveyDocument17 pagesControl Allocation - A SurveySamo SpontanostPas encore d'évaluation
- A4 - G10 - Q3 - Module 7 - MELC 9Document10 pagesA4 - G10 - Q3 - Module 7 - MELC 9Jomar Dominguez CrizoloPas encore d'évaluation
- Curves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDocument14 pagesCurves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDhahair A AbdullahPas encore d'évaluation
- Maths XDocument7 pagesMaths XSakshi RaiPas encore d'évaluation
- Bilinear Interpolation: Y) On A Rectilinear 2D GridDocument3 pagesBilinear Interpolation: Y) On A Rectilinear 2D GridReinaldo Chohfi Jr.Pas encore d'évaluation
- On Additive and Multiplicative Decompositions of SDocument10 pagesOn Additive and Multiplicative Decompositions of SJeanPas encore d'évaluation
- Computational Biology Project ReportDocument15 pagesComputational Biology Project ReportnathanPas encore d'évaluation
- Hanoi Open Mathematical Competition 2016: Junior Section ImportantDocument6 pagesHanoi Open Mathematical Competition 2016: Junior Section ImportantKinomoto SakuraPas encore d'évaluation
- Worksheet 1 (Sol)Document3 pagesWorksheet 1 (Sol)Carlos ArranzPas encore d'évaluation
- CLUMPP and Distruct ProtocolDocument2 pagesCLUMPP and Distruct ProtocolManikantan KPas encore d'évaluation
- HST 1201 - WLP 1 - Introduction To LimitsDocument18 pagesHST 1201 - WLP 1 - Introduction To LimitsTommy Franco David100% (1)
- 9780198070788Document52 pages9780198070788palak parmarPas encore d'évaluation
- 12th Maths Half Yearly Exam Model QSTN 1 EM and TMDocument8 pages12th Maths Half Yearly Exam Model QSTN 1 EM and TMSasiCsePas encore d'évaluation
- 2nd Form Sequence of WorkDocument7 pages2nd Form Sequence of WorkEustace DavorenPas encore d'évaluation
- Mat 1001Document3 pagesMat 1001Taran MamidalaPas encore d'évaluation