Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Design and Analysis of Analog Filters - A Signal Processing PDFDocument453 pagesDesign and Analysis of Analog Filters - A Signal Processing PDFAntoniaMariaPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Estimation of Power in VLSI Circuit Using Various SimulationDocument7 pagesEstimation of Power in VLSI Circuit Using Various SimulationBT KrishnaPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Evolutionary Algorithms ClassificationDocument5 pagesEvolutionary Algorithms ClassificationBT KrishnaPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Diode CharacterizationDocument7 pagesDiode CharacterizationBT KrishnaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Opamp NotesDocument72 pagesOpamp NotessaulpantojaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Design of Digital Differentiators of Order 1/2Document6 pagesDesign of Digital Differentiators of Order 1/2BT KrishnaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Design of Linear Phase FIR Filter Using Differential Evolution Optimization2003Document5 pagesDesign of Linear Phase FIR Filter Using Differential Evolution Optimization2003BT KrishnaPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Singular Value Decomposition Fast Track TutorialDocument5 pagesSingular Value Decomposition Fast Track TutorialHari Narayanan ACPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Paper 15Document5 pagesPaper 15BT KrishnaPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Premier University Department of Computer Science and Engineering (DCSE) Class Schedule (Updated) Session: Fall 2020Document6 pagesPremier University Department of Computer Science and Engineering (DCSE) Class Schedule (Updated) Session: Fall 2020X streamPas encore d'évaluation
- Grundfosliterature 5439530Document244 pagesGrundfosliterature 5439530Dien HuynhPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Build OptionsDocument6 pagesBuild OptionsFranciscoPas encore d'évaluation
- CNC Lathe Machines PDFDocument7 pagesCNC Lathe Machines PDFMetwally Naser100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- LBS SchneiderDocument20 pagesLBS SchneiderTien Dang ThanhPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 18CrNiMo7-6 Chromium-Nickel-Molybdenum Case Hardening Steel - Hillfoot Multi MetalsDocument1 page18CrNiMo7-6 Chromium-Nickel-Molybdenum Case Hardening Steel - Hillfoot Multi MetalsKunal KorePas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- S. No. Unit: (Ch. 23 Item 7)Document4 pagesS. No. Unit: (Ch. 23 Item 7)Muhammad Abdul Wajid RaiPas encore d'évaluation
- CS412, Fall 2010, Assignment 1: SolutionDocument8 pagesCS412, Fall 2010, Assignment 1: SolutionpeacekentPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
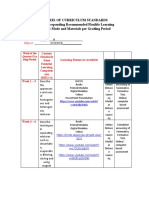
- Matrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodDocument2 pagesMatrix of Curriculum Standards With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodNora HerreraPas encore d'évaluation
- A TCP TutorialDocument11 pagesA TCP Tutorialpfck4589Pas encore d'évaluation
- Et200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFDocument80 pagesEt200sp Ai 4xrtd TC 2 3 4 Wire HF Manual en-US en-US PDFSrikar TanukulaPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Stainless Steel Wire Mesh and Wire ClothDocument3 pagesStainless Steel Wire Mesh and Wire ClothStela LjevarPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Gasoline Direct InjectionDocument21 pagesGasoline Direct InjectionhoangPas encore d'évaluation
- Ponds and Aerated LagoonsDocument24 pagesPonds and Aerated LagoonsGabriella AngPas encore d'évaluation
- Construction Schedule Template 05Document7 pagesConstruction Schedule Template 05bharat gadaraPas encore d'évaluation
- Design of Ms Pipe:: - (40 MM NB, Class'b'Document4 pagesDesign of Ms Pipe:: - (40 MM NB, Class'b'Kancharla Naga Ratna KumarPas encore d'évaluation
- History of UASDocument44 pagesHistory of UASAswin BalasubramaniamPas encore d'évaluation
- VentureDeckingInstallationInstructions LRDocument13 pagesVentureDeckingInstallationInstructions LRGhislainTremblayPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- HK102H To-92Document3 pagesHK102H To-92The FatherPas encore d'évaluation
- WPT PresentationDocument23 pagesWPT PresentationSyed Safiur RahmanPas encore d'évaluation
- Engineering Major: Brandon University Courses by YearDocument2 pagesEngineering Major: Brandon University Courses by YearnavidPas encore d'évaluation
- ASCOM Users GuideDocument21 pagesASCOM Users GuideleloalmeidaPas encore d'évaluation
- Plue InformationDocument34 pagesPlue InformationBisam AlhafizPas encore d'évaluation
- 7.0 Configuration Guide en USDocument395 pages7.0 Configuration Guide en USakdenizerdemPas encore d'évaluation
- Job Procedure For Puncture/Floatation/Rain Water Accumulation TestDocument4 pagesJob Procedure For Puncture/Floatation/Rain Water Accumulation Testfaisal jasim100% (1)
- A-Dec 571 and 6300 Dental Light PDFDocument24 pagesA-Dec 571 and 6300 Dental Light PDFSergio RodriguezPas encore d'évaluation
- Chapter 9 PondsDocument65 pagesChapter 9 Pondssheil.cogayPas encore d'évaluation
- Digital Image Correlation - Tracking With MatlabDocument20 pagesDigital Image Correlation - Tracking With MatlabrajibmePas encore d'évaluation
- Computer Science With Java by Sumita Arora Pdf. TutorialDocument3 pagesComputer Science With Java by Sumita Arora Pdf. TutorialSouryadeep MazumderPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)