Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Guia Controlador XEDocument136 pagesGuia Controlador XEmanuel solano gomez100% (3)
- Irfp 450 RDocument8 pagesIrfp 450 Rpisy74Pas encore d'évaluation
- IRFP150Document8 pagesIRFP150RICHIHOTS2Pas encore d'évaluation
- Irf640N/Irf640Ns/Irf640Nl: N-Channel Power Mosfets 200V, 18A, 0.15Document11 pagesIrf640N/Irf640Ns/Irf640Nl: N-Channel Power Mosfets 200V, 18A, 0.15RICHIHOTS2Pas encore d'évaluation
- IRF830A: Smps MosfetDocument8 pagesIRF830A: Smps MosfetRICHIHOTS2Pas encore d'évaluation
- STK086Document1 pageSTK086RICHIHOTS2Pas encore d'évaluation
- Flyback TransformersDocument17 pagesFlyback TransformersRICHIHOTS2Pas encore d'évaluation
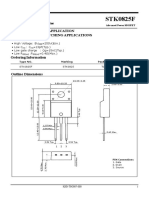
- STK0825F: DC-DC Converter Application High Voltage Switching Applications FeaturesDocument8 pagesSTK0825F: DC-DC Converter Application High Voltage Switching Applications FeaturesRICHIHOTS2Pas encore d'évaluation
- Stim MuscularDocument4 pagesStim MuscularRICHIHOTS2Pas encore d'évaluation
- Technical Guide: Microwave Ovens With InvertersDocument46 pagesTechnical Guide: Microwave Ovens With InvertersKybernetikum100% (1)
- Alta FrecuenciaDocument3 pagesAlta FrecuenciaRICHIHOTS2100% (1)
- Electronic Stethoscope-2 by Audioguru: Parts List: Total Qty. DescriptionDocument1 pageElectronic Stethoscope-2 by Audioguru: Parts List: Total Qty. Descriptionlabbams4uPas encore d'évaluation
- Mindstorms™ Heart Rate Monitor: Thanks To For The Photograph and Schematic (Updated By)Document5 pagesMindstorms™ Heart Rate Monitor: Thanks To For The Photograph and Schematic (Updated By)RICHIHOTS2Pas encore d'évaluation
- Alta FrecuenciaDocument3 pagesAlta FrecuenciaRICHIHOTS2Pas encore d'évaluation
- Physiological StimulatorDocument20 pagesPhysiological StimulatorRICHIHOTS2Pas encore d'évaluation
- High Voltage GenerationDocument6 pagesHigh Voltage Generationdp500100% (1)
- MIR Spirolab II - Service ManualDocument33 pagesMIR Spirolab II - Service ManualAugusto VieiraPas encore d'évaluation
- Electronic Stethoscope-2 by Audioguru: Parts List: Total Qty. DescriptionDocument1 pageElectronic Stethoscope-2 by Audioguru: Parts List: Total Qty. Descriptionlabbams4uPas encore d'évaluation
- Multiplier Design GuidelineDocument15 pagesMultiplier Design GuidelinedewiPas encore d'évaluation
- Tru Trac User ManualDocument41 pagesTru Trac User ManualRICHIHOTS2Pas encore d'évaluation
- Estimulador Electrico TranscutaneoDocument11 pagesEstimulador Electrico TranscutaneoRICHIHOTS2Pas encore d'évaluation
- Ferro Resonance in CVTDocument30 pagesFerro Resonance in CVTKrishna Venkataraman100% (2)
- Ne-1022f SMDocument21 pagesNe-1022f SMRICHIHOTS2Pas encore d'évaluation
- What Is A Constant Voltage TransformerDocument12 pagesWhat Is A Constant Voltage TransformerRICHIHOTS2Pas encore d'évaluation
- Quasi-Resonant Topology Primary Switching Regulators: STR-W6765Document15 pagesQuasi-Resonant Topology Primary Switching Regulators: STR-W6765c434923Pas encore d'évaluation
- Fast Track Troubleshooting: Model: SMH1611 /XAADocument4 pagesFast Track Troubleshooting: Model: SMH1611 /XAARICHIHOTS2Pas encore d'évaluation
- ACT30BHTDocument9 pagesACT30BHTRICHIHOTS2Pas encore d'évaluation
- Switching Regulator BasicsDocument33 pagesSwitching Regulator BasicsUtpal100% (11)
- Supresor de PicosDocument13 pagesSupresor de PicosRICHIHOTS2Pas encore d'évaluation
- 43896Document28 pages43896RICHIHOTS2Pas encore d'évaluation
- AutotelephoneDocument220 pagesAutotelephonetamiresPas encore d'évaluation
- Kertas Penerangan 1Document19 pagesKertas Penerangan 1Amin IqmalPas encore d'évaluation
- Manual Do Gerador WEGDocument122 pagesManual Do Gerador WEGManoel RodriguesPas encore d'évaluation
- JVC Av-28eh1sug Chassis cp830Document33 pagesJVC Av-28eh1sug Chassis cp830Paun Rusalin LucianPas encore d'évaluation
- MPC1000 ServManualDocument22 pagesMPC1000 ServManualAdrian DuMayPas encore d'évaluation
- Assignment 7Document2 pagesAssignment 7Lihle Ayabonga NcambacaPas encore d'évaluation
- MA5800-X15 Quick Installation Guide 02Document21 pagesMA5800-X15 Quick Installation Guide 02Edson ViníciusPas encore d'évaluation
- Kenstel Communications Pvt. LTDDocument5 pagesKenstel Communications Pvt. LTDKamitkumar PatelPas encore d'évaluation
- Iec60502 PVC Lead SHTMLDocument3 pagesIec60502 PVC Lead SHTMLAliPas encore d'évaluation
- Islanding SystemDocument22 pagesIslanding SystemSahil Sankalp PatelPas encore d'évaluation
- Sigma XT User ManualDocument10 pagesSigma XT User ManualmohammadPas encore d'évaluation
- CP 2102Document16 pagesCP 21029183290782Pas encore d'évaluation
- 1N4001S - 1N4007S: FeaturesDocument2 pages1N4001S - 1N4007S: FeaturesselocaPas encore d'évaluation
- Voltage Reference Modifications - Replacing The LM336Z 5.0V ReferenceDocument1 pageVoltage Reference Modifications - Replacing The LM336Z 5.0V ReferenceMoseley MirandaPas encore d'évaluation
- Homework 4 Chapter 1Document2 pagesHomework 4 Chapter 1Santiago Orellana CPas encore d'évaluation
- Endress + Hauser TI01039FEN - 0112 PDFDocument76 pagesEndress + Hauser TI01039FEN - 0112 PDFdwi104Pas encore d'évaluation
- Asic Design FlowDocument2 pagesAsic Design Flowravi3192Pas encore d'évaluation
- 3A, 28V, 925Khz Step-Down Converter: The Future of Analog Ic TechnologyDocument13 pages3A, 28V, 925Khz Step-Down Converter: The Future of Analog Ic TechnologyGabriel GodoyPas encore d'évaluation
- Multivector Pec ExamDocument24 pagesMultivector Pec ExamEssej OrtsacPas encore d'évaluation
- Service and Repair Manual: Ao Avtovaz 2001Document214 pagesService and Repair Manual: Ao Avtovaz 2001Ivan73100% (11)
- Sharplcd13 15 20s1u2Document59 pagesSharplcd13 15 20s1u2Melvin MartinezPas encore d'évaluation
- Relay Master Fault: DI120-150 DI180-420 Run CPU Speed CPU (Meaning) (Actions To Take)Document1 pageRelay Master Fault: DI120-150 DI180-420 Run CPU Speed CPU (Meaning) (Actions To Take)Ace Noah SomintacPas encore d'évaluation
- STP100 110 60 IS XX 11Document230 pagesSTP100 110 60 IS XX 11Monster LifePas encore d'évaluation
- Electrical Engineering QuestionsDocument3 pagesElectrical Engineering QuestionsPrem Sunder GPas encore d'évaluation
- Carlite: Grain Oriented Electrical SteelsDocument27 pagesCarlite: Grain Oriented Electrical SteelsRichard SyPas encore d'évaluation
- 9768 MRO - Hardware InstallationDocument146 pages9768 MRO - Hardware Installationprashant gauravPas encore d'évaluation
- Multi-Function Power Meter - A2000Document8 pagesMulti-Function Power Meter - A2000C&P GroupPas encore d'évaluation
- Simulation & Control For Gas TurbineDocument19 pagesSimulation & Control For Gas Turbineام البنين الرياني100% (1)
- 1 Gill Wind Sensor With Heating Installation Manual 172235KDocument18 pages1 Gill Wind Sensor With Heating Installation Manual 172235KTonyPas encore d'évaluation