Académique Documents
Professionnel Documents
Culture Documents
Mer Letti 2010
Transféré par
sylviasfDescription originale:
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Mer Letti 2010
Transféré par
sylviasfDroits d'auteur :
Formats disponibles
Critical Reviews in Biomedical Engineering, 38(4):305345 (2010)
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
Roberto Merletti,1* Matteo Aventaggiato,1 Alberto Botter,1 Ales Holobar,2 Hamid Marateb,1 & Taian M.M. Vieira1
1Laboratory for Engineering of the Neuromuscular System (LISiN), Department of Electronics, Politecnico di Torino, Italy; 2Faculty of Electrical Engineering and Computer Science, University of Maribor, Slovenia
*Address all correspondence to Prof. Roberto Merletti, LISiN, Politecnico di Torino, Via Cavalli 22/H, 10138 Torino (TO), Italia; Tel: +39 011 433 0476; Fax: +39 011 433 0404; roberto.merletti@polito.it.
ABSTRACT: This article is the first section of a review work structured in three parts and concerning a) advances in surface EMG detection and processing techniques, b) recent progress in surface EMG clinical research applications and, c) myoelectric control in neurorehabilitation. This article deals with the state of the art regarding a) the electrodeskin interface (equivalent circuits, skin treatment, conductive gels), b) signal detection modalities, spatial filters and front-end amplifiers, c) power line interference removal, separation of propagating and non-propagating potentials and removal of outliers from surface EMG signal maps, d) segmentation of surface EMG signal maps, e) decomposition of surface EMG into the constituent action potential trains, and f ) relationship between surface EMG and force. The material is presented with an effort to fill gaps left by previous reviews and identify areas open for future research. KEY WORDS: surface electromyography, electrode-skin interface, power line interference, surface EMG decomposition, surface EMG imaging, EMG-force relationship
I. INTRODUCTION The editorial introducing this issue of Critical Reviews in Biomedical Engineering provides a general framework for the fast growing field of electromyography. This review outlines a) some technical topics and some issues marginally or not addressed in recent overviews of the state of the art; and b) some problems, not ABBREVIATIONS
yet addressed or mostly unsolved and currently under investigation, that represent important challenges for the near future. The electromyogram (EMG) is a compound signal comprising contributions of a few dozens to many hundreds of motor units (MU), which are activated asynchronously, depending on the contraction force. Their electrical contributions to the EMG, the
2-D, 2-dimensional; ARV, averaged rectified value; BSS, blind source separation; CMRR, common mode rejection ratio; CNS, central nervous system; CV, conduction velocity; DD, double differential; DRL, driven right leg circuit; ECG, electrocardiogram; EEG, electroencephalogram; EMG, electromyogram or electromyography; HDsEMG, high density surface electromyogram; ICA, independent component analysis; IED, inter electrode distance; LMS , least mean square; LMSE, least mean square error; MART, multichannel adaptive resonant theory; ML, maximum likelihood; MSE, mean square error; MU, motor unit; MUAP, motor unit action potential; MVC, maximal voluntary contraction; NASICON, Na super ionic conductor; PCA, principal component analysis; PDE, partial differential equation; PLL, phase locked loop; RMS, root mean square; RMSD, root mean square difference; S/H, sample and hold circuit; SD, single differential; sEMG, surface electromyogram or surface electromyography; SENIAM, Surface EMG for Non Invasive Assessment of Muscles (EU Project); SNR, signal-to-noise ratio; VG, virtual ground; VR, virtual reference
0278-940X/10/$35.00 2010 by Begell House, Inc. 305
306
Merletti et al.
motor unit action potentials (MUAP), superimpose linearly both in space and time creating a signal that can be detected with indwelling electrodes (needles, thin wires) or surface electrodes (sEMG). The needle detects signals generated within a volume of a few cubic millimeters near the tip of the needle, resulting in high selectivity. On the contrary, surface electrodes detect signals generated in a volume ranging from a few to hundreds of cubic centimeters in the most superficial layers, depending on the electrode arrangement. The signal on the surface of the skin is a twodimensional (2-D) distribution of potential, which may be sampled with relatively few electrodes. Each surface electrode samples (in space) this potential distribution, generated by the underlying sources, in one location (pixel) of the skin surface so that a rather coarse image can be obtained. In recent years, the detection of sEMG has undergone considerable advances due to the development of linear and 2-D electrode arrays. The latter provide time evolving spatial samples of the instantaneous image of the surface potential distribution. A second type of image describes the spatial distribution of sEMG variables (such as amplitude or spectral variables estimated over a specified time interval) on the skin surface. Successive frames of sEMG amplitudes, either instantaneous or averaged, generate movies of neuromuscular activity. In turn, this implies proper sampling of the images in time and space, an issue often neglected or underestimated in practical applications (see Section II.B). Recent developments in sEMG have taken place in many areas. Most of these developments concern the design of electrode arrays, miniaturization of the front-end electronics, solution of a number of technical, processing and interpretation problems concerning the signals acquired with 2-D arrays of closely spaced electrodes (High Density surface EMG, HDsEMG). These problems are much more serious than those encountered with the classical single electrode pair. The time evolution of the spatial distribution of sEMG potentials is providing much more information about the activation of the underlying muscle(s) than the classical pair of electrodes, used
in kinesiology, and opens new horizons to the noninvasive investigation of the central and peripheral neuromuscular system. This new branch of surface electromyography is evolving into an image-based technique. Merletti and Farina recently published a review on intramuscular EMG signal detection and processing,1 while S. Karlsson and co-workers published one on sEMG processing techniques.2 A third recent review on sEMG was published in Clinical Biomechanics. 3 A fourth review4 dealt with sEMG in gait analysis, an issue not addressed in this work. This review addresses issues concerning traditional as well as HDsEMG and is structured in sections describing technical challenges such as the electrode-skin interface, multichannel detection systems, removal of interferences and artifacts, separation of propagating and non-propagating components, identification of localized muscle activity, decomposition of the HDsEMG into the constituent action potential trains, simultaneous detection of intramuscular and HDsEMG, and EMG-force relationship. These topics may appear as a sample of relatively disconnected problems; the common element is the fact that they are being addressed in a number of laboratories. Most of them are unsolved and represent open challenges that offer room for research to experienced investigators as well as to motivated students. II. AdvanceS IN surface EMG detection techniques II.A. The Electrode-Skin Interface Equivalent circuit. The electrode-skin interface is the first block of any system detecting bioelectric signals. Such interface is complex because of the different charge carriers involved in the media (electrons in the metal material and ions in the gel and skin) and is roughly modeled as indicated in the box of Fig 1a. It consists of an R-C network (Ze), a battery describing the half-cell potential (Vb) and a noise generator (Vn).
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
307
FIGURE 1. a) Ze is the electrode-skin impedance; Zi is the amplifier input impedance. They form a voltage divider whose effect is important in transforming part of the common mode voltage into differential voltage, as explained in Fig. 2a. The equivalent circuit includes a DC generator (Vb) and a noise voltage generator (Vn). b) Magnitude of the electrode-skin-electrode impedance at three frequencies, with and without slight skin abrasion after washing with soap, 1 min and 30 min after electrode application. One pair of Ag-AgCl electrodes (2 mm x 5 mm, 20 mm IED) was placed on the back of the thumb by using perforated foam (filled with conductive gel). Sinusoidal voltages (0.1 Vp) at 30 Hz, 500 Hz, and 10 kHz were applied to measure the impedance on 5 subjects (2 measurements for each subject). c) Magnitude of the impedance of the electrode-gel-skin system measured by applying a 2.5 Ap sinusoidal current at 20 Hz between an Ag-AgCl electrode (2 mm x 8 mm) placed on biceps brachii (by using perforated foam filled with conductive gel) and a reference bracelet electrode (15 cm2 surface) placed around the wrist of the same arm. The relative difference is evaluated between the magnitude of impedance with (ZA) and without (ZNA) skin abrasion (no previous washing). d) Root mean square value (RMS) of the noise between two electrodes applied on the skin above four muscles (two measurements per muscle, frequency range: 10500 Hz). All data collected at the Lab. for Eng. of the Neuromuscular System, Politecnico di Torino. Fig. 1d is reproduced from Merletti and Parker, 2004.16
The impedance Ze of Fig. 1a forms a voltage divider with the input impedance of the amplifier. In the case of differential detection there are two such dividers, one for each input of the differential amplifier. In general Zi>>Ze and the attenuation of the signal is negligible in either the monopolar or
Volume 38, Number 4, 2010
differential detection mode. However, if the two electrode impedances Ze1 and Ze2 are not identical a common mode voltage VCM will generate a differential voltage Vd at the input of the differential amplifier. For Zi>>Ze this voltage value is approximately given by Eq. (1).
308
Merletti et al.
FIGURE 2. a) Explanation of the differential voltage generated by the VCM and by the imbalance of the Ze values (see Fig.1b), Zp is the parasitic impedance between patient reference and power line ground, b) Virtual ground circuit which grounds the patient only for low currents; the current to ground is limited by the high R values. c) Driven Right Leg circuit: the common mode voltage is fed back with reverse phase and reduced by a factor theoretically equal to the gain of the amplifier. Z can be a small capacitor (10100 pF, for stability) or a resistor or may be absent. d) Reduction of power line interference by bootstrap of the isolated power supply. Zin + and Zin- are the internal input impedances of the amplifiers. The entire circuit floats at the common mode voltage and no common mode current theoretically flows into Zin + and Zin-. An optical isolator must be used to separate the floating from the non-floating electronics. V+ and V- are the power supply voltages for the operational amplifiers and are generated by an isolated DC-DC converter. See also Fig. 6 for additional configurations.
(1) Due to the common mode input voltage, the voltage at the output of the front-end amplifier is: (2) where ACM and Ad are the common mode and the differential gains of the amplifier. The second term is often predominant over the first indicating that a high common mode rejection ratio (CMRR =Ad/
ACM) is a desirable but not sufficient condition to reduce common mode interferences. Since the common mode voltage, mostly due to the power line parasitic coupling Cp described in Fig. 2a, may be of the order of a few volts while the signal to be amplified may be 56 orders of magnitude smaller, the reduction of the undesired voltage Vd (generated by VCM ) is very important. A few strategies may be adopted to minimize Vd: 1. Decrease VCM by safely connecting the subject to the power line ground with the Virtual Ground
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
309
(VG) circuit (which limits the leakage current from power line to ground to safe values) or by cancellation techniques such as the Driven Right Leg Circuit (DRL), as described in Fig. 2b and c. 2. Reduce the difference (Ze1 - Ze2) by adding compensating impedances in series with the electrodes or by carefully treating the skin to reduce the contact impedance. 3. Select front-end amplifiers with very high Zi. 4. Detect monopolar signals using a differential technique referred to as virtual reference electrode. These techniques are discussed in Sections II.B and III. Skin treatments. The most important factor affecting the impedance of the electrode-gel-skin interface is the outermost skin layer: the epidermis. Many factors affect the impedance and noise of the electrode-gel-skin interface58: skin treatment, the frequency at which measurements are made, and electrode surface, are the most important ones. Such factors are not only relevant for the detection of bioelectric signals but also for the detection of skin voltage distributions resulting from current injection in electrode impedance tomography. The literature concerning the impedance of the electrode-gel-skin interface is very heterogeneous and contradictory. Many authors mentioned the value of such impedance without indicating electrode size and the frequency at which measurements were made, so that comparison between observations of different authors is often impossible. Proper skin preparation is necessary to reduce the electrode-gel-skin impedance, as well as the imbalance between the impedances of two electrodes, by removing body oils and flaky skin layers. Such preparation (washing with soap, slight or strong abrasion, rubbing with conductive gel, ether or alcohol) is subjective and may lead to different impedance values, depending on the modality of application (Fig. 1b and 1c). The noise generated at the interface also depends on skin treatment (Fig. 1d). In 2000, the European Project on Surface EMG for Non Invasive Assessment of Muscles (SENIAM) proposed a skin preparation protocol that consisted
Volume 38, Number 4, 2010
of shaving, massaging with sandpaper or abrasive paste and rinsing the skin with water to remove the abrasion flaky residuals.9 Different skin treatments give different results. This is demonstrated in Fig. 1b and Fig. 1c, where the impedance obtained testing different skin treatments with the same electrode size is shown. The tests demonstrate the influence of skin treatments on the electrode-gel-skin impedance. Results suggest that the treatment recommended by Hermens et al.9 (rubbing with abrasive gel and then cleaning with tap water) is the best among those being tested. Contrary to common practice, rubbing with alcohol or solvents leaves the skin dry and with high impedance. However, the degree of impedance reduction due to skin treatment is not consistent in different individuals and for different experimenters. An electrode-skin impedance measuring device would be a useful feature to incorporate into a HDsEMG system to automatically detect poor contacts. Skin shaving and abrasion or spiked electrodes (see below) can cause micro-lesions. This has implications concerning re-usable electrodes. Electrode materials and gels. Silver or silver chloride (Ag or AgCl) electrodes are widely used because of their reported low noise, stable and relatively frequency-independent impedance.10 A Silver-Silver Chloride (Ag-AgCl) electrode is produced by placing a silver electrode as the anode in a solution of NaCl. The thickness of the AgCl layer generated with this procedure depends on both the current density and the charge passed. The current density is of the order of 1 mA/cm2 and the charge passed is about 1 C/cm2.10,11 NASICON (Na super ionic conductor) ceramic has also been proposed12 as electrode material. Its general formula is Na1+x Zr2 Six P3-x O12. For x = 2, the ionic resistivity is about 103cm at room temperature. For example, the resistance of a cylinder with the diameter of 1cm and thickness of 2mm is lower than 1k.12,13 NASICON-type ceramic electrode was tested without the application of any electrolyte between the electrode and the skin.12,13 The impedance decreased as a function of time of application, mainly in the resistive component. This was explained by the perspiration process that occurs
310
Merletti et al.
immediately with time after the application of the NASICON-based electrode on the skin. It was also demonstrated that NaCl solution or skin abrasion causes the resistance to decrease markedly.12 Dry disposable electrodes made of silver coated silicon (size 2x2 mm or 4x4 mm), with etched spikes that pierce the stratum corneum to circumvent its high impedance and reach the stratum granulosum, have been proposed.14 Spikes are 0.15 mm apart and 0.10.2 mm in length. A spiked pair of electrodes on the skin present an impedance 1015 times lower than that of a similar pair of electrodes with flat surfaces. The greater contact surface of the spiked electrode reduces the contact impedance and should reduce noise as well as artifacts due to relative electrode-skin movement. Results of studies on noise and artifacts of these electrodes are not yet available. The electromechanical stability of the electrodeskin contact is an important issue in EMG detection since momentary loss of contact, or large changes of contact impedance, induce artifacts in the detected signal. These events may be caused by acceleration and by the inertia of the wires pulling on the electrodes. Conductive gel should limit such artifacts by providing a flexible link between the skin and the electrode. Mechanical disturbance tests aimed to assess resistance to pulling, peeling, and sweating have been described by Roy et al.15 These authors found that the use of hydrophilic gels was associated with greater motion artifacts when the electrode was mechanically perturbed. Additional research is needed to optimize the adhesive used to fix the electrodes and the gel used to improve the contact quality and stability. Most articles in this field are focused on the signal analysis and interpretation and neglect to describe the electrode system and the skin treatment adopted. The SENIAM report9 analyzed 144 peer-reviewed publications: in 57% the electrode material was not mentioned, in 61% the shape and size of the electrodes were not mentioned and in 62% the skin preparation was not described. In 18 articles (13%) the electrodeskin impedance was measured and found in the range of 16 k, but the measurement technique was not described and the frequency of the applied voltage/ current was not always provided. These values are
compatible with large electrode surfaces (order of 1 cm2) but not with small ones (a few mm2), used in electrode arrays, as shown in Fig. 1b and 1c. The issues of electrode-skin interface and the design of optimal gels deserve further investigation. II.B. Detection and Conditioning of EMG From Electrode Array Systems Detecting signals on the skin with a number of point-like electrodes means to sample the potential distribution in space. To meet Nyquist theorem, and avoid aliasing in space, the inter-electrode distance (IED) must be smaller than a threshold value. Considering propagating signals only, such a value can be estimated from the relationship fs = ft/v where fs is the spatial frequency (cycles/m), ft is the temporal frequency (cycles/s or Hz) and v is the signal propagation velocity. Considering further that the highest temporal frequency of sEMG is about 400 Hz and the propagation velocity is near 4m/s the highest spatial frequency of interest is 100 cycles/m and the spatial sampling frequency should be higher than 200 samples/m, which means IED less than 5 mm. This value is rarely met and in most applications of electrode arrays IED is 8 mm or 10 mm, which implies some aliasing in space. The consequences of this aliasing and the value of the highest spatial frequency of the nonpropagating components have not been investigated. Individual electrode pairs usually have an IED of 10 mm to 20 mm. Signal detection techniques. Figure 3 depicts the evolution from a single monopolar or bipolar (SD) EMG channel, detecting the signal in one skin location, to linear arrays and to HDsEMG which detect the image of the potential distribution over the skin surface covered by the array. The SD electrode montage, with electrodes aligned along the fiber direction, provides a high rejection of common mode signals and allows easy identification of innervation zones. The double differential signal (DD) is the difference of SD signals from adjacent channels and is particularly suited for estimation of muscle fiber conduction velocity. Both the SD and DD detection modes introduce spatial filters that
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
311
FIGURE 3. a) Traditional monopolar detection with respect to a remote reference taken as zero (reference) potential. b) Bipolar (or single differential, SD) detection (or montage) along the fiber direction. c) Linear (one dimensional, 1-D) array of electrodes along the fiber direction. Spatial filters (such as double or N-differential) can be obtained by properly weighting and adding the signals from nearby electrodes. d) 2-dimensional (2-D) array of electrodes providing an image of potential distribution. Spatial filters (such as double or N-differential in the column or row direction, Laplacian, inverse binomial, etc.) may be applied to the signals. Image processing procedures may be applied to the image to interpolate or virtually rotate the image to align it with the fiber direction or to detect edges or areas of high or low activity or gradient (see Fig. 13).
are extensively described in many manuscripts and books.16 These spatial filters are desirable to attenuate nonpropagating components of either physiological or external origin, such as those due to end-of-fiber effects, remote sources and power line interference, which are present in the monopolar signals. They imply loss of information that may be relevant for certain applications. The monopolar signals are usually read with respect to a reference provided by an electrode placed far from the muscle of interest, often on a bony prominence where the EMG is presumably zero. This method has drawbacks since the interference voltage present as common mode on the electrodes of the array may be different from that present on the reference electrode. This voltage difference is not
Volume 38, Number 4, 2010
rejected by the differential amplifier and is considered as signal. To overcome this problem, other multichannel bioelectric signals (ECG, EEG) are read with respect to their own spatial average,1719 which is used as a virtual reference. This technique is attractive but implies a form of spatial filtering of which the user must be aware. For this reason the Virtual Reference technique is discussed below. Detection of monopolar signals: Virtual Reference technique. A method to reduce the power line interference from monopolar EMG signals is the detection of each channel with respect to the average of all the detected signals, presumably affected by the same interference. This method is referred to as Virtual Reference (VR) and is based on the fact that the line integral of the EMG potential over its entire support in the fiber direction, as well as the integral of the EMG on a surface that covers the entire spatial support of the potential generated by the active sources, is zero.20 Therefore, such integral, estimated as the average of the electrode potentials, provides a value whose fluctuations represent only the external common mode voltage. This average can be used as a reference with respect to which the monopolar signals of the electrode array are measured. However, this approximation is valid only for an electrode array covering the entire spatial support of the signals generated by the active sources.2123 For EEG applications this requirement is approximately fulfilled by high density detection systems which fully cover the head surface. For practical EMG recordings, this condition can rarely be achieved, thereby, the application of the VR method may lead to filtering effects and modify the shape of the monopolar EMG signals. Monopolar signals detected over a muscle by a multi-channel system aligned to the muscle fibers include both propagating and nonpropagating components. Nonpropagating components are mainly due to external interferences, to cross-talk and to the potential generation (at the neuromuscular junctions) and extinction (at the muscle-tendon junctions, often referred as end-of-fiber effect). See also Section III.D. If the muscle and tendons are not entirely covered by the detection system, the nonpropagating
312
Merletti et al.
FIGURE 4. a) Schematic representation of the Virtual Reference (VR) detection technique applied to channel 0 (first channel of a detection system constituted by N electrodes separated by a distance d aligned with the fiber direction). The impulse response (hVR) and the transfer function (HVR) for the generic channel k are reported. For a given time instant V(z) is the potential distribution in space and VVRk is the signal detected from channel k using the VR technique. V(z,t) is a potential distribution propagating mono-directionally in the z direction with a conduction velocity v. b) Magnitude of the transfer function HVR of channel 10 (N=16, d=5mm) for different conduction velocities (v) of the traveling potential V(z). c) Magnitude of the transfer function HVR of channel 8 (d = 5mm, v = 4m/s) for two detection systems (N=8, N=32). d) Magnitude of the transfer function HVR for all the channels of a 16-electrode detection system (N = 16, d = 5mm, v = 4m/s). |HVR| of channels 1 and 8 are highlighted, |HVR| of the remaining channels (from 2 to 7 and from 9 to 16) are reported in gray.
components do not have instantaneous zero spatial average. Since the VR method in non-ideal conditions implies a spatial filter, the properties of the propagating and nonpropagating components are affected by the application of this technique. To clarify this effect, consider a detection system constituted by N electrodes separated by a distance d, aligned with the fiber direction and placed on one side of the innervation zone (Fig. 4a). The position of the first electrode corresponds to the zero of the z-axis.
The EMG signal (V(z,t)) is a potential distribution, on the surface of the skin above the muscle, propagating in the z direction with a conduction velocity v. For any given time instant to the voltage VVR detected by electrode k, in position zk, using the VR method is: (3)
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
313
From Eq. (3) it appears that the application of VR technique can be described by a filter with spatial impulse response:
(4)
The transfer function in the spatial (Eq. 5) and time frequency (Eq. 6) domains is:
(5)
(6) where s is the spatial angular frequency, is the time angular frequency, and v is the conduction velocity of V(z,t) and s = / v. Note that all the poles on the imaginary axis are cancelled by zeros. From Eq. (6) it can be observed that the properties of the transfer function depend on the following parameters: a) conduction velocity (v) of the EMG signal V(z): HVR = 0, for v . If the nonpropagating components (v ) of EMG signal are identical on all channels they are removed by the VR method while the propagating components are filtered (in time) according to their conduction velocity; b) number of channels (N) of the detection sysfor N . The filtering effect of tem: HVR = the VR method on the propagating components is reduced when the number of the detection channels increases. However, the nonpropagating components are attenuated by the effect described in (a); c) frequency (f) of V(z, t) and distance (d) between two consecutive electrodes: |HVR| presents a dip for f = v / d ; d) the channel (k) to which the method is applied: the filtering effect is different for different channels of the detection system. This effect is reduced with
Volume 38, Number 4, 2010
increasing the number of channels (N) as indicated above in b) . Figure 4 (b,c,d) shows how |HVR()| is affected by the conduction velocity (v) of the EMG signal, the number of channels (N) of the detection system, and the channel (k) to which the VR method is applied. If the VR method is applied to a matrix of electrodes, the effect of the transversal decay (with respect to the propagation direction) of the surface potential could lead to additional distortions of the propagating and nonpropagating components of the signals. If we consider a bi-dimensional detection system with M columns aligned with the propagation direction (z-axis) and N rows (aligned with the x-axis), the potential distribution that propagates in the z direction can be written as V(x,z,t) = a(x)* V(z,t) where a(x) is the function that describes the decay of the potential in the transversal direction (x). The subtraction of the average signal from each channel of the detection system leads to amplitude distortions. These distortions are due to the fact that the amplitude of the average signal is not representative of the signal amplitude detected by each channel of the matrix (ie, the average signal is multiplied by the average of a(x), whereas the generic signal of the column i is multiplied by a(xi), where xi is the x-coordinate of the ith column). The degree of the amplitude distortion depends on the transversal decay function: the higher is the decay rate, the higher is the degree of signal distortion. Thereby, the surface potential generated by superficial motor units (with a fast transversal decay) will be more affected by the use of the VR method with respect to the surface potential produced by deeper sources (with slow transversal decay). For fast transversal decays (superficial motor units), the use of VR method could lead to wrong estimations of the monopolar signal amplitude over the columns of the matrix. Since the magnitude of the amplitude distortion depends on the column position, a consequent error could occur when a spatial filter involving different columns (such as Laplacian, IB2 or transversal SD) is applied to the monopolar signals referred to the average or when
314
Merletti et al.
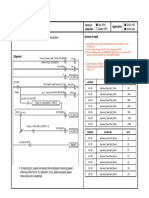
FIGURE 5. a) Example of 16 EMG channels detected with a linear array aligned with the fibers on the biceps brachii muscle. Detection with respect to a remote reference electrode (no VR). Artificial power line interference (50 Hz and four additional harmonics) was added with intensity increasing from ch 1 to ch 16. b) spectrum of ch 7. c) signals from a) measured with respect to the average of the signals in a) (VR). d) spectrum of ch. 7 of c). Note the reduction of physiological common mode signals indicated by the smaller spectral area. Arbitrary units (a.u.) are the same in b) and d).
the conduction velocity vector is not aligned with the z-axis. Another relevant limitation of the VR method is that it is based on the assumption that the external interference (eg, power line interference) affects all the channels of the detection system with the same amplitude and phase. If this hypothesis is not valid, the VR method will not be efficient in the reduction of external interference from all the channels of the detection system. For example, if only one channel is affected, because of a poor contact, all the others will be affected as well because the contribution will be distributed to all channels by the averaged reference. Figure 5a reports an example of monopolar EMG signals detected from the biceps brachii muscle with
a linear array of 16 electrodes (10mm apart) aligned with the fiber direction during an isometric contraction at 30% of the maximal voluntary contraction (MVC). A synthetic power line interference signal (50 Hz plus harmonics) was added to the monopolar EMG signals. The amplitude of the interference signal was linearly increased from channel 1 to channel 16 in order to obtain a non-uniform distribution of the interference amplitude over the detection system. The VR method was applied to the monopolar channels of Fig. 5a thus obtaining the set of 16 signals (VR monopolar signals) reported in Fig. 5b. Figure 5c and 5d show the power spectral density of one channel (number 7) from the panels above. The VR method was effective in reducing the power line
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
315
interference, however, residual spectral lines are still evident at 50 Hz and its harmonics (Fig. 5d). This is due to the fact that the common mode (computed as the spatial average of all the signals of the detection system) is not representative of the interference that affects individual channels (since the amplitude of the interference is not the same for each channel of the detection system) and its subtraction reduces the interference differently in different locations. This effect could lead to substantial alterations of the good EMG signals when an artifact (eg, a contact problem) affects one or few electrodes of the detection system. A considerable reduction of the power of EMG signal can be observed (see Fig. 5c and 5d). This reduction is due to the filtering effect on the physiological nonpropagating components of the monopolar EMG signal. In conclusion, the VR method can be useful to detect monopolar EMG signals with multichannel techniques when the power line interference appears as a true (identical) common mode component over the entire detection system. Nevertheless, the filtering effect on both propagating and nonpropagating components and the high sensitivity to artifacts (due to poor contacts) represent relevant limitations that make the VR method not always preferable with respect to the standard use of a reference electrode. Choosing the proper electrode location. Kinesiological applications of sEMG imply the simultaneous study of sEMG detected with many electrode pairs, each applied on a specific muscle. Finding the optimal location of these electrode pairs is an important issue. Assuming ideal geometry and homogeneous (not necessarily isotropic) tissue, differential detection from a pair of electrodes placed along the fiber direction, symmetrically with respect to the innervation zone (end-plate region) of a motor unit, theoretically provides a near zero voltage.16 Many fusiform muscles have fibers parallel to the skin and innervations of their motor units concentrated in one or two locations. In these cases the location of a pair of electrodes is critical and should be optimized by placing the electrodes between the innervation zone(s) and a muscle-tendon junction. This implies
Volume 38, Number 4, 2010
the identification of the innervation zone(s), a task which can be achieved by means of an electrode array and a multichannel EMG system2428 used before the electrode pairs are applied. In the future an electrode array will likely replace individual electrode pairs. Research is under way for automatic identification of the innervation zone(s) and therefore automatic selection of the best electrode pair from a linear or bi-dimensional array.29,30 Front-end amplifier systems. Figure 6a shows the ideal acquisition system consisting of a high input impedance sample and hold (S/H) circuit, which reads signals directly from the electrodes, followed by a multiplexer and an amplifier that matches the signal amplitude to the input range of the A/D converter. A 24-bit A/D converter would accommodate DC and power line interference components that would be later removed by software. This solution is not yet feasible today because the parasitic capacitances between the digital controls and the analog channels of the S/H and multiplexer circuits introduce artifacts in low level signals (charge injection phenomena). Front-end amplification stages are therefore required. An array of amplifiers that can operate in the monopolar or differential mode is presented in Fig. 6b. The array of input voltage followers provides both impedance buffering and shield drive for the electrode connections, but adds some noise. An array of non-inverting high input impedance amplifiers is depicted in Fig. 6c. This system measures the monopolar input signals with respect to their average and requires highly matched ratios of R2/R1 to guarantee identical gains in all channels to allow the correct computation of differential EMG by successive stages or by software. Each channel is amplified by (1+ R2/R1) and the subtracted average is amplified by R2/R1. This implies choosing R2 >> R1. The limitations of this configuration, similar to the VR, have been discussed above. Figure 6d shows an instrumentation amplifier with cancellation of the DC voltage (implemented by means of the feedback amplifier A5) due to the half-cell potential Vb (Fig. 1a). Alternatively, a unity DC gain of the first stage can be obtained by adding a capacitor in series with the gain-controlling resistor R. In this way the AC components of the signals are
316
Merletti et al.
FIGURE 6. a) Ideal system with low level sample and hold and multiplexer and a single A/D converter. Devices operating at such a low voltage range are not commercially available. Amplification is required before A/D conversion. b) Acquisition system with guarded cables and either monopolar or differential detection. The multiple electronic switch S selects the monopolar or differential option. c) Multichannel amplifier using the average reference system (see text for details), d) Instrumentation amplifier (amplifiers A1, A2, A3) with guarded input, Driven Right Leg (DRL) circuit (amplifier A4) and cancellation of DC output component by integrative feedback (amplifier A5). The circuit in d) can be used to implement each differential amplifier depicted in b). In this case, the channel independent DRL circuit depicted in Fig. 2c should be used.
amplified by the first low-noise stage while the DC component is not and possible saturation of the stage is avoided. A high-pass filter after the differential stage will eliminate the residual DC component. The input impedances of these circuits are due to the input resistance (usually > 1 G) and to the parallel input parasitic capacitance (usually Ci ~ 5 pF) of the differential amplifier. In the sEMG frequency range the capacitive component is the predominant factor. For example, for Ci = 5 pF and f = 100 Hz the input impedance magnitude is only 300 M. Considering that the electrode-skin impedance may range from 50 k to a few M (Fig 1b,c), the phenomenon described in Fig 2a and in Eq. (1)
may introduce substantial components at the power line frequency and its harmonics despite the high common mode rejection ratio (CMRR) of the differential amplifiers. The circuit depicted in Fig. 2d provides a bootstrap technique that strongly reduces the effect of Ze1 Ze2, Zin+ and Zin-. The circuits of Fig. 2d and Fig. 6d may be combined to increase performance and power line rejection. Other approaches have been proposed to reduce the effect of imbalance between Ze1 and Ze2. One is to introduce a fixed resistor in series with one electrode and a voltage controlled resistor in series with the other and automatically adjust it to minimize the power line voltage component at the amplifier
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
317
FIGURE 7. Examples of surface electrode arrays. a) Array of silver coated eyelets on cloth. Conductive gel is injected into the eyelets, b) Flexible printed circuit with 5x6 electrodes. The circuit is applied to the skin with a double adhesive foam whose cavities are filled with conductive gel through holes in the electrodes, c) array of electrodes screen printed on mylar, applied with a double adhesive foam on a biceps brachii muscle, d) another array implemented on flexible printed circuit. e) and f) linear arrays of electrodes screen printed on mylar, g) flexible printed circuit array with 128 electrodes that can bend in two directions.
output by balancing the input resistors.31 Unbalanced capacitances may prevent perfect matching. Another approach is to provide an isolated front-end power supply that is floating with the power line interference (Fig. 2d). The wires connecting the electrodes to the amplifier should be shielded with the shield driven by the signal itself (as in Fig. 6b) or by the common mode voltage provided by the circuit in Fig. 6d. This would reduce the effect of the shielded cable capacitance (not that of the amplifier input capacitance) and the power line interference. A better solution is the incorporation of the front-end amplifier in the electrode array itself to minimize the length of the electrode-amplifier connection. This solution is referred to as active electrode and is often used
Volume 38, Number 4, 2010
but is currently too expensive for disposable arrays. However, it can be implemented on reusable arrays in such a way that the arrays could be washed and cleaned between uses. Research is under way in the field of contactless sensors based on capacitive coupling between the skin and the electrode.32,33 This approach requires very high input impedance amplifiers, accurate guarding and shielding. Signals may be detected through thin clothing. Analog notch filters have been used in the past to remove power line interference. They may be of some use in biofeedback applications with 12 channels, when only signal amplitude or power information is required. In general, this approach is not recommended because of circuit complexity, removal of
318
Merletti et al.
FIGURE 8. Spatial filters and their effects. a1), a2) and a3) Signals obtained simultaneously with the longitudinal single and double differential techniques (SD and DD) and with the Normal DD (Laplacian) configuration. b1) Structure of a 3x3 bidimensional spatial filter; R and C are the Row and Column indices. b2) and b3) Examples of 3x3 spatial filters. b4) Concentric electrode filter. b5) Example of electrode arrangement according to an hexagonal structure. Note that in cases b2) and b3) electrodes are aligned along four spatial directions, 45o apart, whereas in configuration b5) six directions can be identified 30o apart from each other. In both cases the inter-electrode distance is not the same in all directions. Both grids can be extended in space. Interpolation can provide additional pixels and a finer grid.
signal power (in addition to interference power) in the notch band, requirement for components with precise value and low time and temperature drift. Alternative, quasi-on-line or off-line software options are described in Section III.B. Figure 7 shows a few examples of multichannel detection systems. Many other examples exist, developed in many laboratories, implemented on cloth, flexible silicon rubber and other material. The new techniques of printed electronics are very promising in this field and will likely soon lead to the production of ink-jet printed electrode arrays. II.C. Spatial Filters and Cross-talk Consider a sinusoidal potential distribution moving in one direction with constant velocity over a surface. Such velocity (m/s), the wavelength (m), the frequency in space fs (cycles/m or m-1), the period
T (s) and the frequency in time ft (cycles/s or s-1 or Hz) are related by = /T =ft/fs where =1/ fs and T = 1/ ft. A spatial filter provides a (linear or non-linear) combination of the signals detected by a number of point-like electrodes with the purpose of enhancing or attenuating specific spatial frequencies with respect to others. For example, a pair of point-like electrodes spaced d millimeters apart, along the path of propagation and with weights +1 and -1, would reject propagating sine waves with spatial wavelength of d/k meters and enhance spatial wavelengths of 2d/ (2k+1) meters where k is any positive integer.16 A metal electrode with physical dimensions (eg, a disk, a square or a bar, of surface area S) forces equipotentiality on the skin within S at a value approximately equal to the potential average that would be present under the same surface without the electrode.34 Such an electrode is equivalent to
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
319
a spatial low pass filter whose impulse response is h(x,y) =1/S for x and y within S and h(x,y)=0 for x and y outside S. Differential detection (in the direction longitudinal or transversal with respect to the fiber direction) shown in Fig. 8 a1 approximates a spatial derivative and therefore reduces common mode voltages of physiological (end of fiber effect) or external origin (power line interference). More complex linear combinations of electrode signals, such as in Fig. 8 a2, a3, b2, b3, b4,35 provide highpass spatial filters, therefore privileging the sharp signals generated by near sources with respect to the diffused signals generated by remote sources of similar intensity (Fig. 8 a1-a3). For a more detailed analysis of the impulse responses and of the transfer functions of the spatial filters depicted in Fig 8a1a3, see chapter 7 of Merletti et al.16 It could be concluded that high-pass spatial filtering would reduce cross-talk because the decrease of spatially high-passed EMG intensity, with increasing (lateral or vertical) distance between electrodes and sources, is steeper with respect to monopolar detection, as indicated in a number of publications.3639 This conclusion is not always correct since different spatial filters have different transfer functions with respect to propagating and nonpropagating signals and their response depends on the anatomy (thickness and conductivity of subcutaneous and cutaneous layers, fiber length, etc.).38 At some distance from the sources the contributions due to end-of-fiber effects become predominant with respect to the propagating components because the latter decay in space more slowly than the first. Cross-talk is mostly due to nonpropagating components whose amplitudes have a spatial gradient and are therefore different under different electrodes. Its presence affects the estimates of muscle fiber CV which therefore depend on the spatial filter adopted.40 Although different approaches have been tried, such as spatial filters,40,41 removal of nonpropagating components,36 and blind source separation,42 the issue of cross-talk is not yet satisfactorily solved. Nonlinear spatial filters perform nonlinear operations on signals obtained from neighboring electrodes in one or two dimensions. One family of such filters considers the difference
Volume 38, Number 4, 2010
between the energy of one channel and that of the neighbors in one, two or four directions.43 With reference to Fig. 8b1 the filter output at the location (R,C), at each time instant t, is:
(7)
respectively, in the longitudinal or transversal direction, or in the two orthogonal directions. In the work of Zhou43 the signal-to-noise ratio (SNR) and the kurtosis of the probability density functions of signals y were both higher than those obtainable with linear filters since peaks were greatly enhanced. Nonlinear filtering could be used as a form of pre-processing before extraction of motor unit discharges by window comparators. Non-linear filters of higher orders have not been investigated. For example, raising the signal to power 3 would maintain its polarity and further increase the separation among peaks having different amplitudes therefore making it easier to separate them using amplitude thresholds. However, the effect of non linear filtering on superimposed MUAPs has not been investigated and should be treated with caution because of the creation of new signal components in the frequency domain. III. Advances in surface EMG processing and decomposition algorithms III.A. Removing Power Line Interference From EMG Signals Some basic hardware methods to reduce power line interference have been described above (Driven Right Leg, Virtual Ground, bootstrapping, balancing electrode impedances, virtual reference). Very often these techniques are insufficient because the interference is very strong or different on different channels
320
Merletti et al.
FIGURE 9. Basic diagram of the adaptive interference canceller. a) The sinusoidal interference signal I(n) is estimated as y(n) = w1(n) r1(n) + w2(n) r2(n) and subtracted from the input signal. The sine and cosine components r1(n) and r2(n) are obtained with recursive equations where c is updated by the phase information (n) obtained by the Phase Locked Loop (PLL). The weights w1(n) and w2(n) of each harmonic are optimized by the LMS algorithm to minimize the interference contribution to the output e(n). b) Multiplication of the PLL output by the order of the desired harmonic provides the same function for the harmonics of the interference. The system can be expanded for multichannel application by sharing the generation of the sine and cosine functions and duplicating the LMS algorithm for the estimation of a vector of coefficients.
(see Fig. 2a and Fig. 5). Many software techniques, applicable on-line or off-line, are available from the literature and can be applied to a single signal or to an array of signals. Notch filter and spectral interpolation. A numerical narrow-band notch filter, centered on the power line frequency, may be applied to the EMG signal to remove the power line interference. This technique produces a dip into the EMG spectrum and introduces a phase rotation in neighboring harmonics that modifies the shape of the signal components. Digital anti-causal filters, applied off-line, can avoid the phase shift. Spectral interpolation implies computation of the FFT of the original signal, removal of the spectral lines at and near the power line frequency and replacement of such lines (in the amplitude and phase plots) with new lines obtained by polynomial
interpolation based on the lines before and after the removed frequency band. Inverse FFT reconstructs the original signal without the interference components. Notch filters and spectral interpolation methods may be applied at the 50 Hz or 60 Hz line frequency and at their harmonics. See Mewett et al.44 for additional details. Both methods work well if the interfering frequency is constant. Since the power line frequency and its harmonics undergo fluctuations in the range of 23%, adaptive methods perform better because they can track such fluctuations. Adaptive interference cancellers. These cancellers reconstruct the interference component and subtract it from the original signal. To do this they need a reference signal. Since obtaining a reference signal from the power line may not be easy, such reference may be obtained from the signal itself by extracting its
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
321
frequency, amplitude and phase information. Figure 9 indicates the basic principle of the algorithm which generates a sinusoidal signal with amplitude and phase matching those of the signal to be removed. This is achieved by linear combination of a sine wave and cosine wave obtained with the recursive equations given in Fig. 9a and the phase/frequency information derived from a Phase Locked Loop (PLL). A PLL is a system that tracks the frequency and phase of its input signal. Its output provides an estimate of the interference frequency and phase. The weights used for the linear combination are optimized by a LMS algorithm that minimizes the difference between the estimated interference signal and the input signal.
lies outside the overall pattern of a distribution,47 d) a data record that does not follow any pattern in an application,48 and e) a set of data, an observation or a point that is considerably dissimilar or inconsistent with the remaining part of the data.49 There are two main families of statistical outlier detection methods. The first includes the univariate statistical methods. In most of them, it is assumed that the distribution of the data and the type of expected outliers are known.45 While in some of them, the underlying distributions are not assumed.50 Boxplot can be used to identify outliers in univariate analysis. In descriptive statistics, Boxplot can also be used to visualize the difference between populations of the data without any assumption concerning the underlying distribution. It is constructed using the sample minimum (Min), lower, median and upper III.B. Removing Outliers and Artifacts From quartiles (Q1, Q2, Q3 ), and sample maximum (Max). EMG Maps The spacing between the different parts of the plot, indicate the dispersion in the data and can be used When dozens or hundreds of signals are acquired to identify outliers. This can be done, for example, from large arrays, such as those shown in Fig. 7, it is by defining thresholds such as Cutoff1 = Q1 - 1.5 * very likely that a) some contacts are short-circuited (Q3 - Q1) and Cutoff2 = Q3 + 1.5 * (Q3 - Q1), and by gel, or b) some contacts are missing or unstable substituting Min by the value in the data set which is or have high impedance and pick up high interfer- just above the Cutoff1 and Max by the value in the ences due to parasitic coupling with the power line data set that is just below Cutoff2. All the values that and electrode impedance imbalance (see Section are outside this interval are considered outliers. II.B.). In case a) two or more monopolar signals The second is the multivariate type. Multivariate are very similar or identical and the correspond- methods such as Bivariate Extensions of the Boxplot51 ing differential signals are near zero; in case b) one can be used to detect outliers. Its bivariate extenor more monopolar signals show high power line sion (the Quelplot or Relplot) has been proposed interference and so do the corresponding differential by Grnlund et al.52 for sEMG analysis and is signals. In both cases the bad signals are outliers described below. Figure 10 shows the interpolated with respect to the surrounding ones. If the number sEMG amplitude map (RMS) above the biceps of bad signals is limited (<25% of the total number brachii muscle during isometric elbow flexion at 10% of channels) they can be identified automatically as MVC before (left) and after (right) outlier removal. outliers and replaced with artificial signals obtained The map has 49 original pixels. In Fig. 11, the twoby interpolation of the neighboring channels, or, in dimensional representation of the sample data of Fig. some applications, ignored. 10 is shown. To remove the outliers a signal segment In pattern recognition theory an outlier can be is subdivided into 128 ms epochs, each subdivided defined, and dealt with, as a) an observation that into 32 epochs of 4 ms each. The RMS value of the deviates so much from other observations as to signal during the 128 ms epoch is the first variable arouse suspicions that it was generated by a differ- of the plot (x), the RMS value of the signal during ent mechanism,45 b) an observation (or subset of each 4 ms epoch is the second variable of the plot observations) which appear to be inconsistent with (y) and each dot is relative to one channel. For each the remaining of the dataset,46 c) an observation that second, 256 plots are defined and the average x and y
Volume 38, Number 4, 2010
322
Merletti et al.
FIGURE 10. Interpolated amplitude map (RMS computed for 60-ms epoch) above the Biceps Brachii muscle during isometric elbow flexion at 10% MVC before (left) and after (right) processing. The x-axis and y-axis are, respectively, array columns and rows. The original frame has bad-contact problems (R3-C4 and R5-C3) that are identified as described in the text.
FIGURE 11. a) The 2D distribution of the RMS data of 4 ms and 128 ms epochs (first and second descriptor variable) of HDsEMG signal for the 49 channels used in Fig. 10. RMS values are scaled to zero mean and unity variance. The two boxplots indicating the first, second and third quartiles for each variable are shown in the figure and can not identify the two outliers (filled circle). b) The Robust Elliptic Plot (Relplot), a Bivariate extension of Boxplot after decorrelating the two dimensions by means of Principal Component Analysis (PCA). The inner ellipse, called hinge, shows the bulk of the data while the outer ellipse, called fence, identifies the possible outliers (filled circles).51
values of each channel define a point in the plots of Fig. 11. Outliers are identified on a statistical base. Figure 11a shows one of the plots where the two variables have been normalized, as indicated in Grondlund et al.,52 to have zero mean and one standard deviation from the mean. Figure 11b shows the same plot after decorrelation by means
of robust Principal Component Analysis, that is the variables have been rotated in the direction of maximum variance. Considering each dimension independently, it is impossible to identify the two outliers (filled circles) from the two Boxplots because the relationship between the variables is not captured by
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
323
two univariate analysis. By un-correlating the two descriptor variables and using the Relplot (Robust Elliptic Plot), a Bivariate extension of Boxplot,51,52 it is possible to identify the two outliers (Fig. 11b). With this approach,52 the characteristics of the 49 monopolar EMG signals of Fig. 10a were described using the standard deviations of each signal estimated during long and short running windows. They were used to form 256 two-dimensional distributions of the descriptor variables. Then, a Relplot (defined as four separate quarter ellipses used to capture the asymmetry of the RMS values of the short and long epochs) was constructed and used to identify the outliers in two-dimensional space. The number of times each signal was classified as outlier for each epoch provides a signal quality index for every channel and epoch. Expert users can check the quality of the signals and identify the suitable EMG channels from which to extract the desired information. However, this procedure is quite time-consuming especially if the quality of the channels changes over time. A Mamdani Fuzzy system was used to combine knowledge of experts with robust statistics.53 A fuzzy system was used because it can be built on the experience of experts while providing the capability of merging different methods described by rules in conditions that are inherently imprecisely defined. For more information about the Fuzzy systems, readers can refer to Wang.54 In a recent work, Marateb55 investigated three outlier detection methods including distance, density and distribution-based approaches and combined them with the Fuzzy rules obtained from experts.53 Fuzzy membership functions used in the rules were tuned using Particle Swarm Optimization method.56 The output of this Fuzzy system is the probability that each HDsEMG channel is an outlier. Results obtained using the Quelplot are shown in Fig.10 before and after identifying the outliers and correcting the image by interpolation using Partial Differential Equation (PDE)-based image inpainting method which preserves the continuation of level lines.57 The modification of images in a way that is non-detectable for an observer who does not know the original image is called retouching or inpainting.
Volume 38, Number 4, 2010
However, the accuracy of this interpolation is highly dependent on the number of bad-channels present in the interpolation area. When there are few bad channels in the interpolation area (<10% of the total number of channels), the reconstructed activity map can be accepted and used for further processing and interpretation. III.C. Reconstruction of Monopolar Signals From SD Signals The SD electrode montage benefits from the high CMRR offered by high performance differential amplifiers but makes it difficult to create spatial filters that combine monopolar signals. Such signals cannot be obtained from the SD signals unless an additional condition is identified. An additional condition derives from the fact that, at any given time instant, the mean value of the transmembrane current along the entire length of a fiber supporting an action potential is zero. As a consequence, it can be shown that the spatial mean of the monopolar potential distribution over a muscle is zero. Such mean must be computed over the entire spatial support of the signal distribution, a condition that can be rarely met. In particular, this property holds also for the 1-D potential distribution in the direction of the fibers, which is in a longitudinal section of the 2-D distribution. Consider an array with N electrodes that covers the entire longitudinal support of the fibers of a motor unit and the single differential signals (SD) vector obtained from the monopolar signals . The SD signals can be obtained from the monopolar signals as:
(8)
324
Merletti et al.
where is an invertible (square) matrix with dimensions N x N. The last row imposes the condition of zero spatial mean. In such a case the monopolar signals can be reconstructed from the SD signals . Since this operation as where generates monopolar signals that have instantaneous zero spatial means, the interference that would likely be present in the case of direct monopolar detection is absent. If the electrode array covers only part of the spatial support of the signal, the last row of vector and matrix cannot be included. The matrix inversion required to estimate the monopolar signals is replaced by the Moore-Penrose pseudo-inversion. It can be shown that the pseudo-inversion imposes the condition of zero spatial average over the surface or line covered by the electrodes.36 An experimental condition in which the entire signal support in the fiber direction is available is provided by the circular array used for EMG detection from the external anal sphincter (EAS), described in the following article in this issue. In this case, the error between the observed and reconstructed monopolar signals can be used to indicate if the EAS fibers are oriented according to the electrode array or not.58 III.D. Separation of Propagating and Nonpropagating Potentials The EMG signals detected by an array of electrodes aligned with the fiber direction can be approximated as a linear combination of propagating and nonpropagating components. The nonpropagating signals may be due to generation (at the neuromuscular junctions) and extinction effects (at the muscle-tendon junctions) of the motor unit action potentials, to the stimulation artifact in electrically elicited contractions, and to common mode voltages such as power line interference. The propagating components are the motor unit action potentials that are the summation of the potentials propagating from the neuromuscular junctions to muscle-tendon junctions at a velocity of about 4 m/s (physiological range of 36 m/s). The main reasons for separating these two components are a) muscle fiber conduction velocity (CV) is an important physiological variable
whose estimate should be based on propagating components only (see Section III.E.), and b) the nonpropagating components provide information about cross-talk and end-of-fiber effect generated at the muscle-tendon junctions. The following approach has been proposed by Rubio-Vela59 and its results are described in Fig. 12. Let us consider a set of three equally spaced sEMG detection systems detecting a component V1(t) propagating with constant velocity, and a nonpropagating component V0(t) (the method may be applied to either monopolar or SD signals and can be extended to more than three channels) as described in Eq. (14).
(9)
where Ei(t) are the recorded signals, and the coefficients aij (i=1,2; j=0,1) are the unknown elements of matrix A. Let us initially define an estimate for the delay . The Fourier transform of the system of equations defined by Eq. (9) can be written in matrix form as shown below:
(10)
where is the angular frequency and ^ indicates Fourier transformed signals. The above equations will be satisfied when the determinant of the 3x3 matrix is identically zero, which means (11) Equation (11) can be rewritten in the following form (useful for the implementation of an iterative search of the solution)
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
325
FIGURE 12. Separation of propagating from nonpropagating components of sEMG signals detected using a linear electrode array with inter-electrode distance of 5 mm and electrode diameter of 1 mm. a) Three monopolar sEMG channels showing a motor unit action potential during a voluntary contraction of a biceps brachii muscle, b) Propagating component and, c) Nonpropagating component, due to the generation and extinction phenomena. d) Three monopolar sEMG channels showing a compound action potential (M-wave) during an electrically elicited contraction of a biceps brachii muscle. e) Propagating component and, f) Nonpropagating component. The latter is mostly due to the stimulation artifact. Redrawn from Mesin et al.36
(12) and indicates Fourier transform operator (identical to ^ previously used for convenience). The optimal solution of Eq. (13) in the least mean squares (LMS) sense is calculated by taking the Moore-Penrose pseudo-inverse of as follows where the symbols * and # indicate mean square optimal and Moore-Penrose pseudo-inverse. (14)
The weights wij are not known a priori. Eq. (12) can be written in matrix form as follows (13)
Volume 38, Number 4, 2010
326
Merletti et al.
Once the five weights wij are obtained, the four unknown coefficients of the matrix can be obtained by inverting the definitions of the weights wij in terms of the elements aij of the matrix , written in the following matrix form
(15)
From Eq. (15), the unknown elements aij of the matrix are computed optimally in the LMS sense by pseudo-inverting the matrix . Once the coefficient matrix is obtained, the propagating and nonpropagating components are estimated by pseudo-inverting the matrix and applying it to the data (ie, pseudo inverting Eq. 9). The delay can be initially estimated using double differential signals or multichannel estimation as required for the assessment of muscle fiber conduction velocity (Section III.E.) and then refined by minimization of the error between the experimental and the reconstructed signals. This algorithm is sensitive to noise and signal shape perturbations in different channels (that is Vo(t) and V1(t) are not the same on all channels). An improved version has been proposed by Mesin36 who considered a regularization term and reported examples of applications and results. The technique is also suitable for removal of interferences that appear as nonpropagating signals, regardless of their waveform, such as stimulation artifacts, as indicated in Fig. 12d,e,f. A comparison of the various techniques for removing interferences and/or separating components that are not propagating from those that are (possibly resolving different propagation velocities) is missing and long due. III.E. Estimation of Muscle Fiber Conduction Velocity Muscle fiber conduction velocity (CV ) is an important physiological variable because it reflects
muscle fatigue and fiber size. Although it can be estimated from a single SD signal obtained from a pair of electrodes, using the dips introduced by the SD spatial filter, the estimates obtained from linear electrode arrays have much smaller error.6065 If the muscle fibers are parallel to the skin and at least two detection sites are available in the fiber direction above a region of unidirectional propagation, CV is estimated as d/ where d is the distance between the detection sites and is the delay between the two similar signals. Similarity is quantified by the cross-correlation coefficient between the two signals (values >0.8 are considered acceptable). A review of the classical methods for CV estimation is provided in Farina and Merletti.60 The delay that maximizes the cross-correlation function between two signals is the same that minimizes the mean square error between the same signals. This property is exploited in multichannel systems to find the delay whose integer multiples (1, 2, N) minimize the global mean square error (MSE), which is obtained by adding the MSEs of all possible channel pairs. Under the conditions of monodirectional propagation under the array and absence of stationary waves (nonpropagating components, see Section III.D.), increasing the number of channels reduces the estimation error.61 HDsEMG allows the application of new tools for estimates of CV and innervation zone location based on imaging processing techniques.62,63 An extensive literature exists on muscle fiber CV estimation and the interested reader is referred to it. 2,60,61,6466 III.F. Segmentation of Surface EMG Maps Sequences of HDsEMG images are often used to represent regional variations in the degree of muscle activation with time.6769 Visualization of these sequences provides the investigator with immediate information of localized muscle activation. Indeed, as individual portions of the same muscle might be activated selectively, HDsEMG imaging provides a promising tool for ascertaining when and where in the muscle its motor units are activated. The automatic identification of localized muscle activity, for example,
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
327
FIGURE 13. a) Topographical representation of an image created with the ARV amplitudes of experimental EMG signals (epoch of 250 ms); b) the gradient of the EMG relief shown in (a), c) the opened-closed gradient, obtained by filtering the gradient in (b) with equations 20 and 21, d) watershed segmentation of the flattened gradient shown in (c). Note that clusters in (d) enclose groups of pixels with similar intensities in (a).
could be useful for the estimation of the total muscle force, the onset of muscle activity and the degree of activation of different synergists spanning the same joint (see Section III.I.). The watershed technique, originally developed for the automatic segmentation of digital images,70 proved to be accurate for the identification of localized muscle activity in maps of HDsEMG.69 This section summarizes how HDsEMG images should be processed before applying the watershed algorithm, which was developed by Vincent and Soile70 for the automatic segmentation of digital images. Initially, consider the conceptual bases on which the segmentation algorithm is conceived. If HDsEMG images are represented as topographical reliefs, the pixels with high and low intensity (ie, high and low sEMG amplitude) would appear as elevated
Volume 38, Number 4, 2010
and depressed surfaces, respectively, as indicated in Fig. 13a. By piercing such a surface in its regional minima and immersing the whole surface in water, the depressed surfaces would start to flood and form catchment basins. After progressive immersion, the catchment basins would be surrounded by the narrow and elevated surfaces, the watershed lines. Therefore, the watershed algorithm could be applied to the images of gradient of HDsEMG images, where pixels of high intensity (ie, watershed lines of the gradient) confine groups of pixels with low intensity (ie, catchment basins of the gradient). For a detailed description of iteration steps of the watershed algorithm see Vincent and Soile.70 Considering that pixels in the EMG image sample the amplitude of EMG signals in space (ie, ARV or RMS values), the edges of subsets with low
328
Merletti et al.
and high EMG activity can be identified by computing the Euclidean norm gemg of the gradients of the image frames Iemg (Fig. 13b):
(16)
where T indicates the transpose operator, px and py denote the coordinate of each pixel in the EMG image and i corresponds to the time epoch over which Iemg was computed. Nr and Nc stand for the number of elements along the rows and columns of the Sobel operator s: (17) The Sobel mask is preferred over the conventional differential operator because it computes the image gradient by weighting the intensity of neighbor pixels. In any case, the gradient operation emphasizes the noise content in the image and thus leads to the appearance of several regional minima, as indicated in Fig. 13b. For this reason, gemg must be flattened before the application of the watershed algorithm. Otherwise, the occurrence of spurious regional minima would result in the over-segmentation of gemg. Image opening and image closing, for example, are nonlinear operators often used for the filtering of digital images. These operators are attractive and preferred to the use of conventional linear filters because they flatten (eg, remove narrow peaks and gaps) rather than smooth the images.71 Qualitatively, opening and closing attenuate and intensify the intensity of pixels with intensity values exceeding or not reaching some threshold, respectively. The opening and closing operations applied to gemg are defined as: (18) (19)
are the Minkowski addition and where and Minkowski difference operators, respectively. The structuring element v is usually composed of a mask with zeros and ones when processing binary images.71 In such a case, the opening and closing operations resume to the combination of image erosion followed by image dilation and vice versa, respectively. The dilation and erosion operations determine the intensity of any given pixel in the output image by applying a predefined rule to the corresponding pixel and to its local neighbors in the input image. Grayscale image dilation sets the intensity of each output pixel to the highest intensity among all pixels in the neighborhood, whereas gray-scale image erosion sets the intensity of the output pixel to the minimum intensity of all the pixels in the neighborhood: (20) (21) where Dv is a square grid with nine elements, so that the structuring element v corresponds to a mask with zeros disposed into a 3x3 grid. px and py denote the position of the pixel in the input and output image, respectively, and zx and zy are the relative positions of the pixel in the structuring element v. In our case, the size of the input image gemg is defined by the number and disposition of surface electrodes in the grid, while image resolution can be further increased by various interpolation techniques. The opened-closed gradient of Iemg provides a flattened surface for applying the watershed algorithm (Fig. 13c and d). Indeed, the segmentation of such a smoothed gradient results in accurate identification of clusters of high and low EMG activity.69 Figure 13 illustrates how clusters of EMG activity are automatically obtained with the watershed algorithm applied to the smoothed gradient of one HDsEMG map. In this case, three clusters of localized activity were identified, with cluster 3 being the area with highest neuromuscular activity. When a matrix of surface electrodes is used for the monitoring of muscle activation, any regional variaCritical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
329
FIGURE 14. Principle of decomposition of the multichannel surface EMG into the constituent motor unit action potential (MUAP) trains. The algorithm identifies the times of occurrence of repeating events (MUAPs) that are the instants of discharge of the individual motor neurons innervating the muscle fibers closer to the skin. MUAPs contain information on muscle anatomy (length of fibers, location of innervation zones, conduction velocity of action potentials along the muscle fibers, etc.). MU discharge patterns reflect control strategies of central nervous system.
tion in activity might be perceived. On this view, the watershed segmentation showed remarkable potentiality for distinguishing the localized activity between two portions of the same muscle and between two adjacent muscles.69 Other techniques for the processing of HDsEMG images could be applied to further exploit the use of the watershed algorithm for the automatic identification of local variations in muscle activation. The use of global histogram equalization,72 for example, increases the contrast between pixels with low and high intensities and thus increases the segmentation accuracy of HDsEMG images detected for muscle contractions at low effort levels.69 Some properties of the watershed algorithm render its use attractive and preferred with respect to conventional clustering techniques for the autoVolume 38, Number 4, 2010
matic segmentation of EMG maps because 1) the identification of clusters of activity does not rely on the minimization of any distance measure and is not supervised; 2) initial guess about the actual number of clusters in the image is not required; 3) the accuracy is marginally sensitive to noise level, thickness of fat layer and acquisition configuration; 4) isolated pixels with high intensity, likely resulting from contact problems between the skin and the electrode, would be removed by the gradient flattening.7072 III.G. Decomposition of Multichannel Surface EMG Into the Constituent Trains of Motor Unit Action Potentials The decomposition of multichannel sEMG consists of identifying either MUAPs or discharge patterns
330
Merletti et al.
FIGURE 15. Decomposition of the HDsEMG obtained from a healthy abductor pollicis brevis muscle during its isometric contraction, from 0 to 10% MVC and back to 0% in 11 s. Each dot represents a discharge of a motor unit with the instantaneous discharge frequency (inverse of the interspike interval) indicated on the y-axis. The order of motor unit recruitment and decruitment can be seen, associated with the produced muscle force.
of MUs (Figs. 14 and 15). MUAPs contain information on muscle anatomy (length of fibers, location of innervation zones, conduction velocity of action potentials along the muscle fibers, etc.), whereas the discharge patterns reflect the control strategies adopted by the central nervous system (CNS). This information is crucial for advanced research concerning neuromuscular pathologies, work-related disorders, myoelectrical manifestations of fatigue, fiber typing, etc. It is also crucial for prevention of numerous neuromuscular diseases (eg, myalgia, repetitive strain injuries, etc.) and for assessments of effectiveness in motor rehabilitation. In contrast to intramuscular EMG, where the high-selectivity of the detection system enables recordings from nearby muscle fibers only, surface electrodes exhibit much lower selectivity and acquire the contributions of MUs within the distance of up to a few centimeters (Fig. 17). In addition, skin and adipose tissue that separate the active fibers from the detection sites act like a low-pass filter, reducing the frequency bandwidth of sEMG below 500 Hz. Both the aforementioned factors hinder sEMG decomposition as they attenuate morphological differences between MUAPs at the surface of the skin.
Surface EMG decomposition received remarkable attention over the past few years and has recently become feasible under the constraint of controlled isometric conditions and recording of sEMG from several locations over the muscle.7375,8792 Different algorithms proposed can generally be categorized into two large families: blind source separation (BSS) and template matching. This section reviews both families, but focuses particularly on BSS approaches. Template matching approaches. Although the classic template matching algorithms, developed for decomposition of intramuscular EMG, proved unreliable when applied to sEMG, their multichannel extensions provided solid results on relatively sparse sEMG signals, with limited number of MUAP superimpositions.8791 However, these algorithms are typically incapable of dealing with MUAP superimpositions and fail to identify complete discharge patterns of detected MUs. For example, an early approach to multichannel sEMG decomposition was proposed by Gazzoni et al.88 This approach consisted of the following steps: a) segmentation of signals from a 1-D or 2-D array using a multi-scale matched filter (that is a continuous wavelet transform); b) identification of MUAPs
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
331
presenting propagation, in either direction, within a physiological range; c) classification by means of the Multichannel Adaptive Resonant Theory (MART) which groups the propagating MUAPs into clusters (templates) assigned to individual MUs. Since superimpositions are assigned to separate clusters (usually of one element each) and not solved, the discharge rates cannot be estimated. However the extracted MUAP templates provide information on the location, anatomy and CV of individual MUs. A new generation of template matching algorithms is being developed.92 These algorithms derive from estimation theory93 and build on strong probabilistic priors, such as the regularity of interspike intervals, to enhance template recognition on a reduced set of surface electrodes. Blind source separation approaches. The blind source separation (BSS) approach assumes a linear mixing model of the sources either with no memory (instantaneous mixing of sources) or with finite memory (convolutive mixing of the sources). In order to reproduce experimental conditions, a zero-mean noise is usually added to either of the models. Typically, the noise is assumed to be spatially uncorrelated and independent of the source signals. In the instantaneous model, the M mixtures x(t)=[x1(t), x2(t),, xM(t)]T, detected in a time instant t are obtained as a linear combinations of the N source signals s(t) =[s1(t), s2(t),, sN(t)]T at the same time instant:
Convolutive mixing model. Zazula et al.76 and Li et al.77 modeled the mixing process by a causal multidimensional convolution that utilizes the memory of the source samples received in the past using (23) where denotes the time lag. This modeling approach does not assume that the shapes of MUAPs of the same MU are similar in different EMG channels. Even more, by assuming, as in Fig.14, the sources s(t) as series of Delta functions representing neural firings rather than MUAPs, that is as sequences of zeros and ones with each one indicating the discharge of a given MU and zero indicating no discharge, the mixing matrix A directly comprises all the detected MUAP shapes: (24) with aij(,) denoting the -th sample of the MUAP of the j-th MU as detected by the i-th electrode. This model is able to account for the anatomical characteristics of a muscle (being fusiform, annular or pennate), filtering effect of adipose tissue, and any property of the up-taking electrodes or of the spatial filter used. Despite its limitations, the instantaneous model has been frequently addressed,7880 mainly due to its simplicity and availability of algorithms for blind separation of instantaneous mixtures. However, the reported results of instantaneous multichannel sEMG decomposition were of limited success (see Theis and Garcia78 for comparison of different instantaneous BSS algorithms on the same set of sEMG recordings). The convolutive model with impulsive sources, described above, was addressed by Holobar and Zazula, who introduced the Convolution Kernel Compensation (CKC) algorithm.73,74 This algorithm is fully automatic, implicitly resolves MUAP superimpositions, and relies minimally on anatomic properties of the investigated muscle. It extracts complete discharge sequences of MUAPs from the interferential signal (Fig. 14), whereas the MUAP shapes are estimated by spike triggered averaging of
(22) where A() defines the mixing matrix in dependence of geometrical relation between the investigated muscle fibers and the up-taking electrodes. In isometric muscle contraction and with surface electrodes fixed to the skin, (and thus A) can be considered constant, whereas in dynamic conditions changes as a function of the joint angle and other variables. The instantaneous model assumes that the observed mixtures are instantaneous weighted sums of the source signals. This oversimplification ignores many anatomical characteristics, such as MUAP propagation along the muscle fibers, presence of innervation or muscle-tendon zone, heterogeneity of volume conductor that acts like a low-pass filter, and muscle fiber orientation, etc.
Volume 38, Number 4, 2010
332
Merletti et al.
FIGURE 16. a) Discharge patterns of motor units identified from HDsEMG of biceps brachii during an isometric contraction at 10% MVC and MUAPs of MU 4 as detected by the array of 513 electrodes with the corner electrodes missing; b) discharge patterns of motor units identified from HDsEMG of gastrocnemius medialis during isometric contraction at 40% MVC and MUAP shapes of MU 6 as detected by the array of 88 electrodes; c) discharge patterns of motor units identified from HDsEMG of external anal sphincter during its 100% MVC contraction and MUAP shapes of MU 1 as detected by the intra-anal probe with 163 electrodes. All the HDsEMG channels were acquired in single-differential montage. Each dot represents a discharge of a motor unit with the instantaneous discharge frequency (inverse of the interspike interval) indicated on the y-axis.
the EMG signal. By typically requiring a few minutes of computation time on a standard personal computer to decompose one minute long signals, it is suitable for off-line processing and mainly applicable to basic and applied research in neurophysiology. Over the past few years, the algorithm has been extensively tested in a variety of experimental conditions during isometric contractions of healthy muscles with different anatomical properties, ranging from fusiform, trapezoidal, pennate to annular muscles (Fig. 16). In these tests, it identified complete discharge patterns of up to 25 concurrently active motor units, more than any other existing sEMG decomposition technique.81 It is, however, noteworthy that the number of motor units identified with the decomposition of multichannel sEMG varies notably across subjects,
muscles, and experimental conditions. For example, the range of individual motor units detected from the abductor digiti minimi, tibialis anterior, and biceps brachii muscles during static contractions at 20% MVC force ranged from one to nineteen.81,82 The validation of this and other HDsEMG decomposition techniques, that is the quantitative assessment of their accuracy, addresses the important issue of a gold standard in EMG decomposition. Most investigators are currently using the needle EMG as such a standard (see Section III.H.), but a general consensus has not been reached yet. The main drawback of the BSS approach is the number of observations M, which must be larger than the number of sources N. Recently, separation of sparse time series has gained considerable attenCritical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
333
FIGURE 17. Acquisition of surface and intramuscular EMG: the high selectivity of intramuscular electrodes enables the acquisition of high-fidelity signals with contributions from a limited number of motor units. Surface electrodes are located at a much larger distance from muscle fibers and exhibits much lower selectivity than intramuscular electrodes. This attenuates morphological differences between MUAPs of different MUs. Thus, increased spatial support (ie the number of electrodes) of acquired sEMG is required to reliably discriminate different MUs.
tion.8386 By assuming the source signals s(t) have a sparse representation on a given basis, the proposed methods utilize maximum likelihood (ML) estimators in order to iteratively learn both the mixing matrix and the source signals out of the observed data even in underdetermined mixing models (ie, with more sources than observations). Nonetheless, the number of required sEMG observations remained relatively high, implying the use of HDsEMG and multi-channel amplifiers to record from up to a few tens of sEMG signals from a single muscle. The issue of the required number of sEMG channels is still perplexing and requires additional explanation. It is well known that low selectivity of surface electrodes and the low-pass filtering of subcutaneous tissue attenuate morphological differences between MUAPs at the surface of the skin,
Volume 38, Number 4, 2010
thus inducing the need for multichannel recordings (Fig. 17), but the optimal number of electrodes and their configuration is still under investigation. As for intramuscular EMG, the analysis of individual motor units from the sEMG requires the identification and classification of the action potentials significantly contributing to the signal. This task is possible only if the motor units are uniquely represented by their action potentials, regardless of the algorithm used. With decreased fidelity in time support (when compared to intramuscular EMG), sEMG detection must increase the spatial support to guarantee that the MUAPs of different motor units differ from each other. For example, in the study by Farina et al.,75 based on simulated signals, one bipolar recording allowed the discrimination of less than 5% of the motor units active in the muscle tis-
334
Merletti et al.
sue, whereas more than 80% of detected motor units had unique surface representation when a system of 55 electrodes with 3-mm inter-electrode distance was used. Recently, extreme high-pass filtering of sEMG signals (with cut-off frequency set to 300 Hz or above) was proposed to increase the MUAP discriminating properties of template matching algorithms.92 However, these algorithms are currently still under experimental validation. Limitations and constraints of multichannel sEMG decomposition. Decomposition of EMG (intramuscular or surface, based on BSS or template matching) is currently still limited to moderate contraction levels (up to ~50% of maximum voluntary contraction). At higher contraction levels, both the number of active MUs in the detection volume and their discharge rates increase significantly. This typically increases the physiological noise from small and distant motor units and considerably increases the complexity of EMG interference pattern. Different signal preconditioning techniques have been proposed to counteract the low selectivity of sEMG up-taking electrodes. As one of most commonly used countermeasures, spatial filtering has been adopted to reduce the number of MUs significantly contributing to the sEMG signals.9496 Two-dimensional filters, such as the Laplacian (Fig. 8a3), have been shown to substantially improve selectivity with respect to one-dimensional filters97 and individual motor unit action potentials can be extracted from surface recordings by highly selective spatial filters, even at maximal contraction forces.98 The second main limitation of multichannel sEMG decomposition originates in the number of identified MUs. Even with as many as 2025 identified MUs per muscle, the proportion of motor units identified from sEMG is relatively small when compared to the number of active motor units. Also noteworthy, sEMG typically identifies large and superficial motor units, with the average depth up to ~ 1 cm in the muscle tissue.81 Therefore, generalization of the sEMG decomposition results to the whole muscle is only possible if motor units with different properties (size, type, etc.) are considered to have uniform distribution within the muscle cross-section, so that superficial region of such a cross-section is representative of the rest. The problem of represen-
tativeness of identified MUs can partially be solved by simultaneously acquiring and decomposing both surface and intramuscular EMG,99 as discussed in Section III.H. However, despite recent progress, no technique for complete in vivo identification of all MUs active in the muscle tissue is available, yet. Finally, multichannel sEMG decomposition is currently still limited to isometric muscle contractions, ie, contractions in which the geometrical relation between the investigated muscle and up-taking electrodes is fixed in time. Slow changes of MUAP shapes, such as during fatiguing contractions, can readily be tracked and compensated by most of the existing decomposition techniques, however, decomposition of sEMG from patients with large variations of MUAP shapes due to certain neuromuscular diseases can be problematic. The decomposition of EMG during natural muscle movements (ie, in dynamic conditions) is a much more difficult problem. During dynamic muscle contractions, distances between the detection system and the active MUs change continuously as a function of time (or, more precisely, as a function of joint angle). This causes continuous, but substantial changes in the shape of detected MUAPs hindering the EMG decomposition. In fast contractions, the mixing matrix A(,) from model (Eq. 24) may substantially change within a few tens of milliseconds, that is, within the length of the average interspike interval. These dynamics can currently neither be modeled nor tracked by EMG techniques. No attempt to decompose the dynamic EMG signals, even those recorded during very moderate dynamic contractions, has been published. III.H. Simultaneous Acquisition of Intramuscular and Multichannel sEMG The number of MUs identified from sEMG is currently limited to approximately 30, with a typical range from 10 to 20 MUs per contraction. This number is relatively small when compared to the total number of motor units active in the skeletal muscle. When a larger number of MUs is required, multichannel sEMG must be recorded and decomposed simultaneously with intramuscular recordings.82 As
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
335
already mentioned, with respect to the intramuscular EMG, the multichannel sEMG is limited to superficial MUs and samples from a much larger spatial support (Fig. 17). Therefore, it is very unlikely that both surface and intramuscular acquisition techniques detect exactly the same subset of active MUs. Decomposition of simultaneously acquired intramuscular and multichannel sEMG has been used for validation of sEMG decomposition.82,92 The rationale for this is two-fold. First, many experimentally validated decomposition techniques exist for intramuscular EMG and they have been considered reliable and accurate for several decades.100 Second, the agreement of two independent decomposition techniques applied to two different sets of simultaneously acquired EMG recordings is commonly considered a direct indication of accuracy since it is very unlikely that the same errors are made by both methods.101 The joint recording of intramuscular and sEMG signals is also useful to simultaneously investigate peripheral and central control properties of the neuromuscular system as it likely increases the number of identified MUs.82 Typically, the discharge times identified from the decomposition of intramuscular EMG signals are used to trigger the time-locked averaging of the sEMG signal and thus to extract and estimate the surface representation of the single unit action potentials that cannot be reliably identified from the sEMG. From the surface action potentials, motor unit properties, such as muscle fiber conduction velocity, location of innervation zone and muscle fiber length and orientation can be estimated,39 though the proposed estimators have mainly been limited to fusiform muscles. Spike-triggered averaging is also applied to the joint torque for estimating the torque contribution of individual units,102 although the approach has several limitations.103 III.I. EMG-Force Models and Models of Load Sharing The possibility of estimating muscle force from the sEMG signal is very attractive since it might assess the contributions of single muscles to the total force
Volume 38, Number 4, 2010
exerted by a muscle group. However, assessing the relationship between the force exerted by a given muscle and its sEMG signal requires measuring the force exerted by such muscle. This is presently impossible for most joints of the human body since many agonist and antagonist muscles are acting on a joint and the accessible variables are only the total force and the EMG of the individual muscles (possibly affected by cross-talk from other nearby muscles), as indicated in the two-muscle example indicated in Fig. 18a. The force produced by a skeletal muscle is regulated by two main mechanisms: the recruitment of MUs, and the increase of firing rate of the active MUs.104,105 These two mechanisms are present in different proportions in different muscles. In some muscles the recruitment is complete at about 50% of the maximal force, while in others it progresses up to the maximal voluntary contraction force. The amplitude of the sEMG signal depends on both the number of active MUs and their discharge rate. Since both EMG amplitude and force increase as a consequence of the same driving mechanisms, it is expected that muscle force may be estimated from sEMG analysis. However, since the sEMG is the algebraic summation of MU action potentials (MUAP), and since MUAPs are bi-phasic or tri-phasic, their summation can be constructive or destructive while the summation of force contributions is only constructive.106,107 Fuglevand et al.105 developed a motor-unit pool model in order to quantify the relationship between sEMG and muscle force. Different MU recruitment patterns were tested obtaining different shapes of sEMG-force relationships. Results suggested that the sEMGforce relationship was linear until the recruitment of MUs was complete (firing rates were different for all MUs). Above this limit, the force increased because of the increased MU firing rates and the sEMG-force relationship became non-linear. As force increased, the firing rates of the MU converged towards the same value, increasing the amplitude of the sEMG signal, and resulting in a non-linearity of the sEMG-force relationship. In Fuglevand et al.,105 the initial linearity of this relationship was defined as not immediately clear, because of the presence of
336
Merletti et al.
FIGURE 18. a) Example of load sharing between two muscles each producing a force or contributing to the torque at the joint. Only the total force or torque is available together with the EMG amplitude of the HDsEMG channels obtained from an electrode array. The estimation of the force/torque contributions of the individual muscles is an open problem. b) The relationship between the normalized force generated by a muscle and the normalized EMG obtained from the same muscle may be different depending on the location of the recruited motor units (MU). Two extreme cases are shown: in case a) recruitment proceeds from the most superficial to the deepest MUs, in case b) recruitment proceeds from the deepest to the most superficial MUs generating different force-EMG curves.
many non-linear phenomena (such as mutual cancellation of some MUAPs due to the temporal overlap of positive and negative phases, the sigmoid relation between MU force and firing rate, the saturation in MU firing rate [], and the non-linear distributions of recruitment thresholds, twitch forces, and MUAP amplitudes across the MU population). Since the relationship between excitatory drive and EMG amplitude, and between excitatory drive and force had similar shapes, the linear sEMG-force relationship was explained by saying that this linearity does not imply that muscle force or EMG behave linearly, rather, it simply indicates that the respective inputoutput properties have a similar shape.
In addition, the contribution provided by a MU to the sEMG depends on the distance of the MU from the surface electrodes while its contribution to force does not. Different sEMG-versus-force curves are obtained depending on the MU locations and the geometrical features of recruitment, as indicated in Fig. 18b. Finally, only superficial MUs contribute to sEMG, while all MUs contribute to force. These facts seriously complicate the possibility of estimating force from sEMG. Despite these difficulties, the problem of force estimation using sEMG signals has been addressed by many researchers in the past108116 by modeling as well as by experimentally normalizing force and sEMG amplitude (with respect to their respective
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
337
maxima). Relevant reviews about this topic are by Staudenmann,106 Zajac,117 and Disselhorst-Klug et al.118 and the interested reader is referred to these works. In this review some of the different approaches will be discussed. In some muscles, such as those controlling the fingers, the relationship between force and sEMG amplitude was found to be linear,108 while in others the relation is closer to a parabolic shape.112 Simulation studies105,120 included a number of recruitment modalities and demonstrated that different motor unit recruitment patterns generating the same force can give different sEMG-force relationships. In Staudenmann106 it is concluded that, although linear models are often used to link the force to the sEMG, the sEMG amplitude is not necessarily linearly related to the force. In Disselhorst-Klug118 the relationship between the sEMG signal of biceps brachii and the exerted force in isometric conditions has a parabolic shape that changes with the variation in elbow angle (ie, with the variation in length of muscle fibers and muscle lever arm). When the force exerted at each elbow angle is normalized with respect to the maximal force exerted at that angle, the parabolic shape of the sEMG-force relationship is the same for all joint angles. The torque recorded from the elbow joint is the summation of the torques exerted by different muscles (long and short heads of biceps brachii, brachioradialis, brachialis, lateral, long, and medial heads of triceps brachii) and no information about the load sharing is given. The relationship between the sEMG amplitude detected on a single muscle and the global force/torque is strongly affected by the activation of the other muscles on that joint.119 In addition, when discussing the issue of the relation between sEMG amplitude and force, a number of other factors should be taken into account, such as the sEMG amplitude estimator, myoelectric manifestations of fatigue, electrode configuration, cross-talk from other muscles, and type of sEMG signal processing. In order to estimate the muscle force from the sEMG amplitude, a good amplitude estimator is needed. The EMG signal can be considered having a mean of zero and a near-Gaussian amplitude distribuVolume 38, Number 4, 2010
tion. Both RMS and averaged (or low-pass filtered) rectified values (ARV) are appropriate in order to estimate the EMG amplitude.106 Furthermore, Solomonow et al.121 have found that, when ARV is used, the sEMG amplitude is better related to force (during EMG recordings with stimulated muscles). Also in Disselhorst-Klug118 it is suggested to quantify the sEMG activity by full-wave rectification followed by a moving average with an averaging interval of about 100200ms. In the Least Mean Square Error (LMSE) sense, RMS is the optimal estimator for a Gaussian distribution and ARV is the optimal for a symmetric exponential distribution (Laplacian).122 For practical purposes the difference is not very important and both estimators are used. During fatiguing isometric contractions a) the sEMG amplitude increases in the absence of muscle force increases, and b) there is shift in signal power to the lower end of the spectrum, representing a modest decrease in high frequency power and a relative large increase in low frequency power. The RMS or ARV calculated from the raw sEMG signal can be affected by muscle fatigue. In order to improve the sEMG-based force estimation also in fatiguing conditions, Potvin and Brown123 suggested use of high pass filtering to remove between 90% and 99% of the raw sEMG signal power. The performance of the filtering used for biceps brachii (isometric contractions with forearm flexed at 90) was consistent with that observed using temporal whitening of sEMG signals.124126 However, in some applications the high pass filtering technique described in123 does not show the best matching between estimated and recorded force. For example, in the work of Brown and McGill119 the force-sEMG relationship of the trunk muscles was analyzed by low-pass filtering the sEMG signals at 500 Hz, rectifying them, and low-pass filtering at 2.5 Hz. The results obtained with this procedure were compared with results obtained after high-pass filtering (at 300 Hz) the raw signals as described in Potvin and Brown.123 This procedure did not improve the estimation of force. The electrode placement and montage play an important role in EMG-based force estimation. Staudenmann et al.106 reported that muscle force esti-
338
Merletti et al.
mation based on SD configuration is very sensitive to the electrode alignment to the muscle fiber direction. Contrary to SD detection, monopolar configuration does not reduce the nonpropagating components of the MUAPs generated at the fiber-tendon transitions. These standing waves can be enhanced when the electrode configuration is aligned with the muscle fiber direction and high-pass filtering is applied. The articles and reviews quoted above mostly refer to single channel sEMG. It is reasonable to expect that more (or better selected) information extracted from the sEMG with linear of 2-D arrays might provide better estimates of force. Information could be extracted from specific portions of the surface by segmenting the HDsEMG by means of the technique described in Section III.F. or by reducing the dimensionality of the signal array using Principal Component Analysis (PCA) or Independent Component Analysis (ICA). This approach has been tested by Staudenmann et al.127129 and some of the results are summarized below. In Staudenmann,127 it is concluded that the use of HDsEMG improves the EMG-based force estimation by decreasing the root mean square difference (RMSD) between the estimated force and the recorded one by about 30%, compared to RMSD obtained with a pair of bipolar electrodes. In the latter case, the RMSD between the estimated and the recorded torque depends on the electrode location. These authors 127 used data acquired with the HDsEMG to simulate bipolar electrodes and they demonstrated that the quality of force estimation can be affected also by the alignment of bipolar electrode pairs with the muscle fiber direction. Staudenmann et al.,129 observed that the kurtosis of HDsEMG indicates a super-Gaussian character, and therefore Independent Component Analysis (ICA) improves the matching between the recorded force and the estimated one above PCA. These authors tested the performances of ICA applied to HDsEMG and demonstrated that this technique improves the force estimation by reducing the RMSD between the recorded and estimated force of about 13% (compared to the RMSD obtained with PCAbased estimation). Spatial filtering can be applied to improve the selectivity of the HDsEMG signals. If the SD (or
higher order filter) signals are obtained from the HDsEMG monopolar signals, the detection volume decreases and cross-talk from other muscles is potentially reduced, improving the relationship between force and the spatially filtered sEMG signals. However, the reduction of cross-talk by high pass spatial filtering is a highly controversial issue and it is widely discussed in Mesin et al.37 In DisselhorstKlug118 the problem of cross-talk is approached by using a fuzzy logic system. A cross-talk risk factor is calculated individually for each pair of muscles (biceps brachii and triceps brachii), and it reflects the probability of cross-talk occurrence. This technique might be able to distinguish between cross-talk and co-activation. In dynamic conditions, the relationship between sEMG signal and force does not depend just on the angle of joints or the length of muscle fibers, but also on the contraction condition. Eccentric or concentric contractions give different force-sEMG relationship. For the same force value, sEMG activity is higher in concentric contractions compared to static isometric contractions, while it is lower in eccentric contractions.118 The muscle fiber length, the MVC and the relationship between force and sEMG amplitude change when the joint angle changes.117 In agreement with these observations, Staudenmann106 reported that, in dynamic conditions, a simple relationship between the sEMG amplitude and the force is not applicable. In this case, the force estimation is usually approached with Hill-type models. These models are based on the idea that the force-sEMG relationship depends on the joint angle, the contraction velocity and other parameters related to the subject, the muscle(s), and the exercise performed by the subject. These models are developed in order to capture the large variability of dynamic properties between muscles within and between subjects without introducing too many free model parameters that cannot be directly validated.106 The estimation of the force or torque produced by muscle A and by muscle B using the observable quantities indicated in Fig. 18 implies a model of load sharing. A possible model relating force or torque to sEMG amplitude for a single muscle is:
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
339
where Vm is the known EMG envelope obtained as the low-pass filtered spatial average of the rectified values of HDsEMG channels obtained from an electrode array covering the surface of muscle m. The linear and exponential weights W1,m and W2,m can be estimated as the values that minimize the MSE between the model equation Tt (t)= N m=1 (W1,m Vm(t)W2,m) and the experimental curve Te (t). N is the number of muscles acting on the joint and the number of available sEMG signals. The number of weights to be estimated from one experimental torque plot Te (t) is 2N and the problem of multidimensional optimization (minimization of the MSE between the experimental and the estimated torques) becomes highly complex as N increases. The issues concerning normalization procedures and multiple minima are being addressed.130 This model was tested on the muscles acting on the elbow joint as flexors or extensors of the forearm. Figure 19 shows an example of load sharing estimation. This approach to the estimation of load sharing is currently under investigation. In conclusion, the identification of a relationship between sEMG and force/torque applied to a joint is still an open issue. HDsEMG yields better estimates than single channel sEMG, especially if temporal PCA or ICA is used, rather than simple spatial averaging of the sEMG envelopes. Whether spatially filtered signals (eg, SD signals) are preferable to monopolar, whether using only the high frequency part of the sEMG spectrum is preferable to using the entire spectral information, whether HDsEMG segmentation does or does not provide advantages with respect to using the entire spatial information, are important research questions still open to future investigation. IV. Conclusions A search in the PubMed database using the keywords surface EMG, reviews yields 115 review papers in the last 10 years. On average, a new review on some aspect or application of sEMG is published every month on topics ranging from signal proVolume 38, Number 4, 2010
Tm (t)= W1,m Vm(t)W2,m
(25)
FIGURE 19. Estimation of the load sharing from forearm flexors and extensors. The muscles taken into account are: biceps brachii (BB), brachioradialis (BR), the lateral head of triceps brachii (TBL), and the medial head of triceps brachii (TBM). Brachialis muscle and the long head of triceps are neglected. The model, described in Eq. 25, estimates the global torque acting on the elbow as the sum of the contributions provided by the muscles, on the base of their sEMG amplitude and Eq. 25. Note the estimated flexion torques during extension and extension torques during flexion. They may be attributed either to muscle coactivation or to cross-talk between antagonist muscles.
cessing and neurophysiology to kinesiology and to biofeedback, from back muscles to masticatory muscles to sphincters. The topic of HDsEMG has been the focus of opening and keynote lectures at the Congresses of the International Society for Electrophysiology and Kinesiology.131 This review provides a summary of recent technical advances on HDsEMG and addresses in detail some specific topics that are currently under investigation while omitting others that have recently been described in other review articles. The research activity described in this work is developing fast with continuous progress towards more sophisticated methods for reliable extraction of information from HDsEMG to provide objective tools for the analysis of muscle function and performance. More than one solution is being investigated for each problem. For example, the problem of removal of interferences from sources such as power line may be addressed with an electrode skin contact having more uniform quality across
340
Merletti et al.
an electrode array (Section II.A), with the virtual ground or the DRL techniques or with a virtual reference (Section II.B), with adaptive interference cancellers (Section III.A.), or by separating propagating and nonpropagating potentials (Section III.D.). Similar examples of multiple approaches concern HDsEMG segmentation in space, dimensionality reduction by PCA or ICA, decomposition and force estimation. The other two reviews following in this issue describe the clinical applications of these tools. Acknowledgment This work was supported by the following foundations: Compagnia di San Paolo, and Fondazione CRT, within the framework of European Projects NEW, CyberManS and DEMUSE and by the Regional Administration of Piemonte. Support for doctoral and post-doctoral fellowships was provided by Bitron Industries, the Brazilian Government (CNPq) and the Italian Ministry for University and Research. References
1. Merletti R, Farina D. Analysis of intramuscular electromyogram signals. Philos Trans Royal Soc A. 2009 Jan 28;367(1887):357368. 2. Karlsson S, Roeleveld K, Gronlund C, Holtermann A, stlund N. Signal processing of the surface electromyogram to gain insight into neuromuscular physiology. Philos Trans Royal Soc A. 2009;367:33756. 3. Merletti R, Botter A, Troiano A, Merlo E, Minetto MA. Technology and instrumentation for detection and conditioning of the surface electromyographic signal: state of the art. Clin Biomech (Bristol, Avon). 2009 Feb;24(2):12234. 4. Frigo C. Crenna P. Multichannel SEMG in clinical gait analysis: a review and state of the art. Clin Biomech. 2009;24:23645. 5. Yamamoto Y, Yamamoto T. Characteristics of skin admittance for dry electrodes and the measurement of skin moisturisation. Med Biol Eng Comput. 1986;24:717.
6. McAdams ET, Jossinet J, Lackermeier A, Risacher F. Factors affecting electrode-gel-skin interface impedance in electrical impedance tomography. Med Biol Eng Comput. 1996 Nov;34(6):397408. 7. Huigen E, Peper A, Grimbergen CA. Investigation into the origin of the noise of surface electrodes. Med Biol Eng Comput. 2002 May;40(3):3328. 8. Hewson DJ, Hogrel JY, Langeron Y, Duchne J. Evolution in impedance at the electrode-skin interface of two types of surface EMG electrodes during long-term recordings. J Electromyogr Kinesiol. 2003 Jun;13(3):2739. 9. Hermens HJ, Freriks B, Disselhorst-Klug C, Rau G. Development of recommendations for SEMG sensors and sensor placement procedures. J Electromyogr Kinesiol. 2000 Oct;10(5): 36174. 10. Geddes LA. Electrodes and the measurement of bioelectric events. New York: Wiley-Interscience; 1972. 11. Janz G J, Ives DJG. Silver, silver chloride electrodes. Ann NY Acad Sci. 1968;148:21021. 12. Gondran C, Siebert E, Fabry P, Novakov E, Gumery PY. Non-polarisable dry electrode based on NASICON ceramic. Med Biol Eng Comp. 1995;33(3):4527. 13. Khireddine H, Fabry P, Caneiro A, Bochu B. Optimization of NASICON composition for Na+ recognition. Sensors and Actuators B. 1997 May 15;40(23):22330. 14. Griss P, Enoksson P, Tolvanen-laakso, Merilainen P, Ollmar S, Stemme G. Micromachined electrodes for biopotential measurements. J Micromech Systems. 2001;10:106. 15. Roy SH, De Luca G, Cheng MS, Johansson A, Gilmore LD, De Luca CJ. Electro-mechanical stability of surface EMG sensors. Med Biol Eng Comput. 2007 May;45(5):44757. 16. Merletti R, Parker PA. Electromyography: physiology, engineering and noninvasive applications. Hoboken (NJ): IEEE Press and John Wiley & Sons, Inc; 2004. 17. Offner FF. The EEG as potential mapping: the value of the average monopolar reference. Electroencephalogr Clin Neurophysiol. 1950 May;2(2):2134. 18. Picton TW, Bentin S, Berg P, Donchin E, Hillyard SA, Johnson R Jr, Miller GA, Ritter W, Ruchkin DS, Rugg MD, Taylor MJ. Guidelines for using human event-related potentials to study cognition: recording
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
341
19. 20.
21.
22.
23.
24.
25.
26. 27.
28. 29.
30.
standards and publication criteria. Psychophysiology. 2000;37(2):12752. Srinivasan R, Winter WR, Nunez PL. Source analysis of EEG oscillations using high-resolution EEG and MEG. Prog Brain Res. 2006;159:2942. Bertrand O, Perrin F, Pernier J. A theoretical justification of the average reference in topographic evoked potential studies. Electroencephalogr Clin Neurophysiol. 1985 Nov;62(6):4624. Junghfer M, Elbert T, Leiderer P, Berg P, Rockstroh B. Mapping EEG-potentials on the surface of the brain: a strategy for uncovering cortical sources. Brain Topogr. 1997;9(3):20317. Junghfer M, Elbert T, Tucker DM, Braun C. The polar average reference effect: a bias in estimating the head surface integral in EEG recording. Clin Neurophysiol. 1999 Jun;110(6):114955. Yao D, Wang L, Arendt-Nielsen L, Chen AC. The effect of reference choices on the spatiotemporal analysis of brain evoked potentials: the use of infinite reference. Comput Biol Med. 2007 Nov;37(11):152938. Piitulainen H, Rantalainen T, Linnamo V, Komi P, Avela J. Innervation zone shift at different levels of isometric contraction in the biceps brachii muscle. J Electromyogr Kinesiol. 2009;19(4): 66775. Piitulainen H, Bottas R, Linnamo V, Komi P, Avela J. Effect of electrode location on surface electromyography changes due to eccentric elbow flexor exercise. Muscle Nerve. 2009;40(4):61725. Mesin L, Merletti R, Rainoldi A. Surface EMG: the issue of electrode location. J Electromyogr Kinesiol. 2009;19(5):71926. De Nooij R, Kallenberg LA, Hermens HJ. Evaluating the effect of electrode location on surface EMG amplitude of the m. erector spinae p. longissimus dorsi. J Electromyogr Kinesiol. 2009 Aug;19(4):e25766. Martin S, MacIsaac D, Innervation zone shift with changes in joint angle in the brachial biceps. J Electrom Kinesiol. 2006;16:1448. Soares FA, de Andrade MM, Rocha AF, Merletti R. Automatic tracking of innervation zones using image processing methods. Proceedings of the XVIII Congress of the ISEK, Aalborg, Denmark, 2010. Nishihara K, Kawai H, Gomi T, Terajima M, Chiba Y. Investigation of optimum electrode locations by using an automatized surface electromyography analysis technique. IEEE Trans Biomed Eng. 2008;55(2 Pt 1):63642.
31. Silva IS, Navier JF, Freire R. Compensation of mismatch electrode impedance in biopotential measurements, MeMeA 2006, International Workshop on medical measurement and applications, Benevento, Italy. 32. Spinelli E, Haberman M. Insulating electrodes: a review on biopotential front ends for dielectric skin-electrode interfaces. Physiol Meas. 2010 Oct;31(10):S18398. 33. Gourmelon L, Langereis G. Contactless sensors for surface electromyography. Proceedings of the 28th IEEE EMBS Annual Int. Conf. New York; 2006. p. 25147. 34. Farina D, Merletti R. Effect of electrode shape on spectral features of surface detected motor unit action potentials. Acta Physiol Pharmacol Bulg. 2001;26(12):636. 35. Farina D, Cescon C. Concentric ring electrode system for non-invasive detection of single motor unit activity. IEEE Trans. Biomed Eng. 2001;48(11):132634. 36. Mesin L, Reddy Kandoor AK, Merletti R. Separation of propagating and nonpropagating components in surface EMG. Biomed Signal Processing Control. 2009;3(2):12637. 37. Mesin L, Smith S, Hugo S, Viljoen S, Hanekom T. Effect of spatial filtering on crosstalk reduction in surface EMG recordings. Med Eng Phys. 2009;31(3):37483. 38. Farina D, Mesin L, Martina S, Merletti R. Comparison of spatial filter selectivity in surface myoelectric signal detection: influence of the volume conductor model. Med Biol Eng Comput. 2004;42(1):11420. 39. Farina D, Cescon C, Merletti R. Influence of anatomical, physical, and detection-system parameters on surface EMG. Biol Cybern. 2002 Jun;86(6): 44556. 40. Schulte E, Farina D, Rau G, Merletti R, DisselhorstKlug C. Single motor unit analysis from spatially filtered surface electromyogram signals. Part 2: conduction velocity estimation. Med Biol Eng Comput. 2003 May;41(3):33845. 41. Farina D, Schulte E, Merletti R, Rau G, DisselhorstKlug C. Single motor unit analysis from spatially filtered surface electromyogram signals. Part I: spatial selectivity. Med Biol Eng Comput. 2003 May;41(3):3307. 42. Farina D, Fvotte C, Doncarli C, Merletti R. Blind separation of linear instantaneous mixtures of non-
Volume 38, Number 4, 2010
342
Merletti et al.
43.
44.
45. 46. 47. 48. 49.
50. 51. 52.
53.
54. 55.
56.
stationary surface myoelectric signals. IEEE Trans Biomed Eng. 2004;51(9):155567. Zhou P, Suresh NL, Lowery MM, Rymer WZ. Nonlinear spatial filtering of multichannel surface electromyogram signals during low force contractions. IEEE Trans Biomed Eng. 2009 Jul;56(7):18719. Mewett DT, Reynold KJ, Nazeran H. Reducing power line interference in digitized electromyogram recordings by spectrum interpolation. Med Biol Eng Comput. 2004;42:52431. Hawkins D. Identification of outliers. London: Chapman and Hall; 1980. Barnet V, Lewis T. Outliers in statistical data. 3rd ed. New York: John Wiley & Sons, Chichester; 1994. Moore DS, McCabe GP. Introduction to the practice of statistics. 3rd ed. New York: W.H. Freeman; 1999. Chen Z, Fu A, Tang J, Detection of outliered pattern. Tech. Report, Dept. of CSE, Chinese Univ. Hong Kong, 2002. Ramasmawy R, Rastogi R, Kyuseok S. Efficent algorithm for mining outliers from large datasets. Proceedings of 2000 ACM SIGMOD Int. Conf. Data Manag, Dallas, May 2000. p. 93104. Hadi AS. Identifying multiple outliers in multivariate data. J Royal Stat Soc Series B. 1992;54(3):761 71. Goldberg KM, Iglewicz B. Bivariate extensions of Boxplot. Technometrics. 1992;34:30720. Grnlund C, Roeleveld K, Holtermann A, Karlsson JS. On-line signal quality estimation of multichannel surface electromyograms. Med Bio Eng Comput. 2005;43:35764. Marateb HR, Soares AF, Rojas M, Merletti R. An expert-based fuzzy system for automatically identifying the location of muscle innervation zones in surface electromyography. Proceedings of the International Xth Quantitative EMG conference; 2009 May 610; Venice, Italy. Wang L-X. A course in Fuzzy systems and control. Upper Saddle River (NJ): Prentice Hall; 1996. Cateni S, Colla V, Vannucci M. A fuzzy logicbased method for outliers detection. Proceedings of the 25th International Conference of Artificial Intelligence and Applications. Innsbruck, Austria, 2007. pp. 5616. Marateb HR, McGill KC. Resolving superimposed MUAPs using particle swarm optimization. IEEE Trans Biomed Eng. 2009;56:9169.
57. Bertalimo M. Strong-continuation, contrastinvariant inpainting with a third-order optimal PDE. IEEE Trans Image Processing. 2006 Jul;15(7):19348. 58. Mesin L. Estimation of monopolar signals from sphincter muscles and removal of common mode interference. Biomed Signal Processing Control. 2009;4(1):3748. 59. Rubio Vela J, Merletti R, Fan Y. Separation of travelling from non-travelling components in surface myoelectric signals. Proceedings of the VI Mediterranean Conference on Medical and Biological Engineering vol. I; 1992 Jul 510; Capri, Italy. 60. Farina D, Merletti R. Methods for estimating muscle fibre conduction velocity from surface electromyographic signals. Med Biol Eng Comput. 2004;42:43245. 61. Farina D, Merletti R. Estimation of average muscle fiber conduction velocity from two-dimensional surface EMG recordings. J Neurosci Methods. 2004;134:199208. 62. Grnlund C, stlund N, Roeleveld K, Karlsson JS. Simulataneous estimation of muscle fibre conduction velocity and muscle fiber orientation using 2D multichannel surface electromyogram. Med Bio Eng Comput. 2005;43:6370. 63. Soares FA, Andrade MM, Rocha AF. S-EMG conduction velocity estimation using image processing techniques. Proceedings of the XVIII Congress of the ISEK, Aalborg, Denmark, 2010b. 64. Farina D, Merletti R. Comparison of algorithms for estimation of EMG variables during voluntary isometric contractions. J Electromyogr Kinesiol. 2000;10(5):33749. 65. Farina D, Muhammad W, Fortunato E, Meste O, Merletti R, Rix H. Estimation of single motor unit conduction velocity from surface electromyogram signals detected with linear electrode arrays. Med Biol Eng Comput. 2001;39:22536. 66. Zwarts MJ, Stegeman DF. Multichannel surface EMG: basic aspects and clinical utility. Muscle Nerve. 2003;28(1):117. 67. Staudenmann D, Kingma I, Daffertshofer A, Stegeman DF, van Dien JH. Heterogeneity of muscle activation in relation to force direction: a multi-channel surface electromyography study on the triceps surae muscle. J Electromyogr Kinesiol. 2009 Oct;19(5):88295. 68. Vieira TMM, Windhorst U, Merletti R. Is the stabilization of quiet upright stance in humans
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
343
69.
70.
71.
72.
73. 74. 75.
76.
77.
78.
79.
80.
driven by synchronized modulations of the activity of medial and lateral gastrocnemius muscles? J Appl Physiol. 2010a;108:8597. Vieira TMM, Merletti R, Mesin L. Automatic segmentation of surface EMG images: improving the estimation of neuromuscular activity. J Biomech. 2010b (in press). Vincent L, Soile P. Watershed in digital spaces: an efficient algorithm based on immersion simulations. IEEE Trans Pattern Anal Mach Intellig. 1991 Jun;13(6): 58398. Heijmans HJAM. Mathematical morphology: a modern approach in image processing based on algebra and geometry. SIAM Review. 1995;37(1): 136. Kim JY, Kim LS, Hwang SH. An advanced contrast enhancement using partially overlapped sub-block histogram equalization. IEEE Trans Circ Syst Video Technol. 2001 Apr;11(4):47584. Holobar A, Zazula D. Correlation-based decomposition of surface EMG signals at low contraction forces. ed Biol Eng Comput. 2004;42:48796. Holobar A, Zazula D. Multichannel blind source separation using convolution kernel compensation. IEEE Trans Sig Process. 2007;55:448796. Farina D, Negro F, Gazzoni M, Enoka RM. Detecting the unique representation of motor-unit action potentials in the surface electromyogram. J Neurophysiol. 2008;100:122333. Zazula D, Holobar A. An approach to surface EMG decomposition based on higher-order cumulants. Comput Methods Programs Biomed. 2005;80:S5160. Li Q, Yang JH, Chen X, Liang Z, Ren YX. The decomposition of surface EMG signals based on blind source separation of convolved mixtures. Conf Proc IEEE Eng Med Biol Soc. 2005;6:59125. Theis FJ, Garcia GA. On the use of sparse signal decomposition in the analysis of multi-channel surface electromyograms. Signal Processing. 2006;86(3):60323. Nakamura H, Yoshida M, Kotani M, Akazawa K, Moritani T. The application of independent component analysis to the multi-channel surface electromyographic signals for separation of motor unit action potential trains: part I-measuring techniques. J Electromyogr Kinesiol. 2004;14(4):42332. Garcia GA, Okuno R, Akazawa K. A decomposition algorithm for surface electrode-array electromyogram. A noninvasive, three-step approach to analyze
81.
82.
83. 84. 85. 86.
87.
88.
89.
90.
91.
92. 93.
surface EMG signals. IEEE Eng Med Biol Mag. 2005;24(4):6372. Holobar A, Farina D, Gazzoni M, Merletti R, Zazula D. Estimating motor unit discharge patterns from high-density surface electromyogram. Clin Neurophysiol. 2009;120:55162. Holobar A, Minetto MA, Botter A, Negro F, Farina D. Experimental analysis of accuracy in the identification of motor unit spike trains from high-density surface EMG. IEEE Trans Neural Syst Rehabil Eng. In press, 2010. Girolami M. A variational method for learning sparse and overcomplete representations. Neural Comput. 2001;13:251732. Davies M, Mitianoudis N. A simple mixture model for sparse overcomplete ICA. IEEE Proc Vis Image Signal Processing. 2004;151:3543. Wersing H, Eggert J, Krner E. Sparse coding with invariance constraints. Proc ICANN. Istanbul, Turkey; 2003. pp. 285392. Jost P, Vandergheynst P, Lesage S, Groibonval R. MoTIF: An efficient algorithm for learning translation invariant dictionaries. Proceedings of the ICASSP 2006, vol.5, pp. V-857- V-860, 2006. Blok JH, van Dijk JP, Drost G, Zwarts MJ, Stegeman DF. A high-density multichannel surface electromyography system for the characterization of single motor units. Rev Sci Instr. 2002;73:188797. Gazzoni M, Farina D, Merletti R. A new methd for the extraction and classification of single motor unit action potentials from surface EMG signals. J Neurosc Methods. 2004;136:16577. Kleine BU, van Dijk JP, Lapatki BG, Zwarts MJ, Stegman DF. Using two-dimensional spatial information in decomposition of surface EMG signals. J Electromyogr Kinesiol. 2007;17(5):53548. Drost G, Kleine BU, Stegeman DF, van Engelen BG, Zwarts MJ. Fasciculation potentials in highdensity surface EMG. J Clin Neurophysiol. 2007 Jun;24(3):3017. Maathuis EM, Drenthen J, van Dijk JP, Visser GH, Blok JH. Motor unit tracking with highdensity surface EMG. J Electromyogr Kinesiol. 2008;18(6):92030. De Luca CJ, Adam A, Wotiz R, Gilmore LD, Nawab SH. Decomposition of surface EMG signals. J Neurophysiol. 2006 Sep;96(3):164657. Key SM. Fundamentals of statistical signal processing. Volume I: estimation theory. Upper Saddle River (NJ): Prentice-Hall Inc.; 1993.
Volume 38, Number 4, 2010
344
Merletti et al.
94. Reucher H, Rau G, Silny J. Spatial filtering of noninvasive multielectrode EMG: part I--Introduction to measuring technique and applications. IEEE Trans Biomed Eng. 1987;34:98105. 95. Reucher H, Silny J, Rau G. Spatial filtering of noninvasive multielectrode EMG: part II--Filter performance in theory and modeling. IEEE Trans Biomed Eng. 1987;34:10613. 96. Rau G, Disselhorst-Klug C. Principles of highspatial-resolution surface EMG (HSR-EMG): single motor unit detection and application in the diagnosis of neuromuscular disorders. J Electromyogr Kinesiol. 1997;7:2339. 97. Disselhorst-Klug C, Silny J, Rau G. Improvement of spatial resolution in surface-EMG: a theoretical and experimental comparison of different spatial filters. IEEE Trans Biomed Eng. 1997;44:56774. 98. Disselhorst-Klug C, Bahm J, Ramaekers V, Trachterna A, Rau G. Non-invasive approach of motor unit recording during muscle contractions in humans. Eur J Appl Physiol. 2000;83:14450. 99. Negro F, Holobar A, Farina D. Fluctuations in isometric muscle force can be described by one linear projection of low-frequency components of motor unit discharge rates. J Physiol. 2009;587(24): 592538. 100. Stashuk D. EMG signal decomposition: how can it be accomplished and used? J Electromyogr Kinesiol. 2001;11:15173. 101. Mambrito B, De Luca CJ. A technique for the detection, decomposition and analysis of the EMG signal. Electroencephalogr Clin Neurophysiol. 1984;58:17588. 102. Stein RB, French AS, Mannard A, and Yemm R. New methods for analysing motor function in man and animals. Brain Res. 1972;40:18792. 103. Taylor AM, Steege JW, Enoka RM. Motor-unit synchronization alters spike-triggered average force in simulated contractions. J Neurophysiol. 2002;88:26576. 104. Henneman E, Somjem G, Carpentr D. Functional significance of cell size in spinal motoneurons. J Neurophysiol. 1965;28:56080. 105. Fuglevand AJ, Winter DA, Patla AE. Models of recruitment and rate coding organization in motorunit pools. J Neurophysiol. 1993;70(6):247088. 106. Staudenmann D, Roeleveld K, Stegeman DF, van Dien JH. Methodological aspects of SEMG recordings for force estimation: a tutorial and review. J Electromyogr Kinesiol. 2010 Jun;20(3):37587.
107. Farina D, Cescon C, Negro F, Enoka RM. Amplitude cancellation of motor-unit action potentials in the surface electromyogram can be estimated with spike-triggered averaging. J Neurophysiol. 2008;100(1):43140. 108. Bigland B, Lippold OCJ. The relation between force, velocity and integrated electrical activity in human muscles. J Physiol. 1954;123(1):21424. 109. Hof AL, Van den Berg J. EMG to force processing I: An electrical analogue of the Hill muscle model. J Biomech. 1981a;14(11):74758. 110. Hof AL, Van den Berg J. EMG to force processing II: Estimation of parameters of the Hill muscle model for the human triceps surae by means of a calfergometer. J Biomech. 1981;14(11):75970. 111. Hof AL, Van den Berg J. EMG to force processing III: Estimation of model parameters for the human triceps surae muscle and assessment of the accuracy by means of a torque plate. J Biomech. 1981;14(11):77185. 112. Lawrence JH, De Luca CJ. Myoelectric signal versus force relationship in different human muscles. J Appl Physiol. 1983 Jun;54(6):16539. 113. Doorenbosch CA, Harlaar J. Accuracy of a practicable EMG to force model for knee muscles. Neurosci Lett. 2004 Sep 16;368(1):7881. 114. Hoozemans MJ, van Dien JH. Prediction of handgrip forces using surface EMG of forearm muscles. J Electromyogr Kinesiol. 2005 Aug;15(4):35866. 115. Clancy EA, Bida O, Rancourt D. Influence of advanced electromyogram (EMG) amplitude processors on EMG-to-torque estimation during constant-posture, force-varying contractions. J Biomech. 2006;39(14):26908. 116. Liu MM, Herzog W, Savelberg HH. Dynamic muscle force predictions from EMG: an artificial neural network approach. J Electromyogr Kinesiol. 1999 Dec;9(6):391400. 117. Zajac FE. Muscle and tendon: properties, models, scaling, and application to biomechanics and motor control. Crit Rev Biomed Eng. 1989;17(4):359411. 118. Disselhorst-Klug C, Schmitz-Rode T, Rau G. Surface electromyography and muscle force: Limits in sEMG-force relationship and new approaches for applications. Clin Biomech. 2009;24(3):22535. 119. Brown SHM, McGill SM. Co-activation alters the linear versus non-linear impression of the EMGtorque relationship of trunk muscles. J Biomech. 2008;41(3):4917.
Critical Reviews in Biomedical Engineering
Advances in Surface EMG: Recent Progress in Detection and Processing Techniques
345
120. Zhou P, Rymer WZ. Factors governing the form of the relation between muscle force and the EMG: a simulation study. J Neurophysiol. 2004 Nov;92(5):287886. 121. Solomonow M, Baratta R, Shoji H, DAmbrosia RD, The myoelectric signal of electrically stimulated muscle during recruitment: an inherent feedback parameter for a closed-loop control scheme. IEEE Trans Biomed Eng. 1986;33(8):73545. 122. Clancy EA, Hogan N. Probability density of the surface electromyogram and its relation to amplitude detectors. IEEE Trans Biomed Eng. 1999;46:7309. 123. Potvin JR, Brown SHM. Less is more: high pass filtering, to remove up to 99% of the surface EMG signal power, improves EMG-based biceps brachii muscle force estimates. J Electromyogr Kinesiol. 2004;14(3):389399. 124. Clancy EA, Hogan N. Single site electromyography amplitude estimation. IEEE Trans Biomed Eng. 1994;41:15967. 125. Clancy EA, Farry KA. Adaptive whitening of the electromyogram to improve amplitude estimation. IEEE Trans Biomed Eng. 2000;47(6):70919. 126. Clancy EA, Morin F, Merletti R. Sampling, noise-reduction and amplitude estimation issues in
127.
128.
129.
130.
131.
surface electromyography. J Electromyogr Kinesiol. 2002;12:116. Staudenmann D, Kingma I, Stegeman DF, van Dieen JH. Towards optimal multi-channel EMG electrode configurations in muscle force estimation: a high density EMG study. J Electromyogr Kinesiol. 2005;15(1):111. Staudenmann D, Kingma I, Daffertshofer A, Stegeman DF, van Dien JH. Improving EMGbased muscle force estimation by using a highdensity EMG grid and principal component analysis. IEEE Trans Biomed Eng. 2006;53(4): 7129. Staudenmann D, Daffertshofer A, Kingma I, Stegeman DF, van Dien JH. Independent component analysis of high-density electromyography in muscle force estimation. IEEE Trans Biomed Eng. 2007;54(4):7514. Merletti R, Aventaggiato M. EMG-force relationship; preliminary data on load-sharing. Proceedings of the XVIII Congress of the ISEK, Aalborg, Denmark, 2010. Merletti R, Holobar A, Farina D. Analysis of motor units with high-density surface electromyography. J Electromyogr Kinesiol. 2008;18(6): 87990.
Volume 38, Number 4, 2010
Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- IEC 60601 1 2 4th Edition PDFDocument21 pagesIEC 60601 1 2 4th Edition PDFjose david bermudez perez0% (1)
- Ceramic Materials For 5g Wireless CommunicationsDocument14 pagesCeramic Materials For 5g Wireless CommunicationsMirela CimpanuPas encore d'évaluation
- User Manual: Security at FingertipsDocument6 pagesUser Manual: Security at FingertipsSAMPas encore d'évaluation
- Activities On AC Motors in 2007Document22 pagesActivities On AC Motors in 2007CarlosPas encore d'évaluation
- Ten Things To Do With A PCDocument4 pagesTen Things To Do With A PCYohaira MoscosoPas encore d'évaluation
- Data Sheet: HCPL-4506/J456/0466, HCNW4506Document21 pagesData Sheet: HCPL-4506/J456/0466, HCNW4506Roozbeh BahmanyarPas encore d'évaluation
- Mobile Radio Communication With Various Digital MoDocument7 pagesMobile Radio Communication With Various Digital MoMohamed FayedPas encore d'évaluation
- Nanotechnology in ElectronicsDocument28 pagesNanotechnology in ElectronicsAbhishek RajPas encore d'évaluation
- Data Benchmarking: (RF) Connection Accessibility Task RetainabilityDocument2 pagesData Benchmarking: (RF) Connection Accessibility Task RetainabilityBonar SianiparPas encore d'évaluation
- Moeller - Easy Control EC4P PG en 5 2012Document2 pagesMoeller - Easy Control EC4P PG en 5 2012micaPas encore d'évaluation
- EV ProSound Speaker and Electronics FullCatalog - LR-spreadDocument40 pagesEV ProSound Speaker and Electronics FullCatalog - LR-spreadgreggles69Pas encore d'évaluation
- ENcoder Notes EE101Document13 pagesENcoder Notes EE101mohitPas encore d'évaluation
- How To Improve Signal Reception On 3G - 4G-LTE Dongle (Data Card) - Telecom VibeDocument5 pagesHow To Improve Signal Reception On 3G - 4G-LTE Dongle (Data Card) - Telecom VibevenkatsubbuPas encore d'évaluation
- Cisco Prime Infrastructure 3.xDocument5 pagesCisco Prime Infrastructure 3.xC KPas encore d'évaluation
- KX TDA100 200 - Presentation PDFDocument16 pagesKX TDA100 200 - Presentation PDFhappykglayPas encore d'évaluation
- Electronic SymbolDocument28 pagesElectronic Symbolsponge bobPas encore d'évaluation
- Unit 1 Computer Applications1-1Document126 pagesUnit 1 Computer Applications1-1Tttt FfffPas encore d'évaluation
- Up 980 960Document4 pagesUp 980 960davidsevrodPas encore d'évaluation
- HPW FullLine Catalog 2015Document284 pagesHPW FullLine Catalog 2015Carlos Buznego NiochetPas encore d'évaluation
- Sith-Model: CAE in Power-ElectronicsDocument7 pagesSith-Model: CAE in Power-ElectronicsAbdulAzizPas encore d'évaluation
- MATLAB Projects List From SoftroniicsDocument11 pagesMATLAB Projects List From SoftroniicssoftroniicsPas encore d'évaluation
- Sd3 (U) Over Speed: Application Point of DetectionDocument1 pageSd3 (U) Over Speed: Application Point of DetectionAce Noah SomintacPas encore d'évaluation
- NASA Aviation Safety Reporting SystemDocument6 pagesNASA Aviation Safety Reporting Systemazx72Pas encore d'évaluation
- R12 BSC 6900 - Neighboring Cells - Script GeneratorDocument28 pagesR12 BSC 6900 - Neighboring Cells - Script Generatorachmad amrullohPas encore d'évaluation
- 50W Monocrystalline Solar Panels: Electrical SpecificationsDocument1 page50W Monocrystalline Solar Panels: Electrical SpecificationsCloue DeriadaPas encore d'évaluation
- Toll Final DocsDocument76 pagesToll Final Docshamed razaPas encore d'évaluation
- SE8300 User Interface Guide: Commercial and Hotel/Lodging HVAC Fan Coil ApplicationsDocument50 pagesSE8300 User Interface Guide: Commercial and Hotel/Lodging HVAC Fan Coil ApplicationsInflation EngineeringPas encore d'évaluation
- Antennas EdgeDocument153 pagesAntennas Edgemc chesterPas encore d'évaluation
- COA Module 4 FinalDocument22 pagesCOA Module 4 FinalAkhil KrishnaPas encore d'évaluation
- User Manual-MultimeterDocument24 pagesUser Manual-MultimeterneddylalolaPas encore d'évaluation