Académique Documents
Professionnel Documents
Culture Documents
2008ARTIGO - GustavoCSCMarques - EstudoeDesenvolvimentodeCódigoComputacionalBaseadonoMEFpara Análise dinâmicaNãoLinearGeométricaDeSólidoBidi
Transféré par
Marcela BrunaTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
2008ARTIGO - GustavoCSCMarques - EstudoeDesenvolvimentodeCódigoComputacionalBaseadonoMEFpara Análise dinâmicaNãoLinearGeométricaDeSólidoBidi
Transféré par
Marcela BrunaDroits d'auteur :
Formats disponibles
ISSN 1809-5860
ESTUDO E DESENVOLVIMENTO DE CDIGO COMPUTACIONAL BASEADO NO MTODO DOS ELEMENTOS FINITOS PARA ANLISE DINMICA NO LINEAR GEOMTRICA DE SLIDOS BIDIMENSIONAIS
Gustavo Cod dos Santos Cavalcanti Marques1 & Humberto Breves Coda 2
Resumo
O objetivo principal deste trabalho o desenvolvimento de uma formulao e sua implementao computacional para se analisar, via Mtodo dos Elementos Finitos (MEF), o comportamento dinmico no linear geomtrico de slidos bidimensionais. Inicialmente, trata-se o comportamento geometricamente no linear atravs de uma formulao posicional classificada como Lagrangeana total com cinemtica exata. No estudo do comportamento dinmico utiliza-se um algoritmo de integrao temporal baseado na famlia de integradores temporais de Newmark. Para a considerao do impacto adota-se uma tcnica que utiliza como integrador temporal o algoritmo de Newmark, modificado de forma a garantir sua estabilizao, e limita-se a posio de cada n da estrutura que por ventura sofra impacto. O cdigo computacional desenvolvido validado atravs de exemplos tradicionais da literatura cientfica. Analisam-se exemplos com comportamento apenas no linear geomtrico e no linear geomtrico dinmico com ou sem impacto. Palavras-chave: anlise no linear geomtrica; dinmica; impacto; elementos finitos.
INTRODUO
O conhecimento do comportamento mecnico de uma estrutura, dentro de um regime no linear, essencial para a concepo de estruturas cada vez mais leves e esbeltas sem ocorrer diminuio no seu padro de segurana e de qualidade. Para isso, necessrio se utilizar teorias mais complexas, como formulaes no lineares, de forma a melhor caracterizar o comportamento dos materiais utilizados na construo de estruturas e sua geometria, dentro dos critrios de segurana e utilizao das mesmas. Nesse sentido, o objetivo principal deste trabalho apresentar uma formulao, baseada no potencial de energia total e na primeira lei da termodinmica,
1 2
Mestre em Engenharia de Estruturas - EESC-USP, gustavocoda@hotmail.com Professor do Departamento de Engenharia de Estruturas da EESC-USP, hbcoda@sc.usp.br.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
38
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
para se analisar, via Mtodo dos Elementos Finitos (MEF), o comportamento dinmico no linear geomtrico de slidos bidimensionais. O comportamento geometricamente no linear ser tratado atravs de uma formulao posicional, desenvolvida em CODA (2003) e GRECO & CODA (2004), e que pode ser classificada como Lagrangeana total com cinemtica exata. Para a modelagem dinmica, utilizar-se- um algoritmo de integrao temporal baseado na famlia de integradores temporais de Newmark. Por fim, utilizar-se- uma tcnica de impacto entre estrutura e anteparo rgido que consiste na limitao de posio de cada n da estrutura que por ventura sofram impacto.
FORMULAO NO LINEAR PROBLEMAS DINMICOS
GEOMTRICA
APLICADA
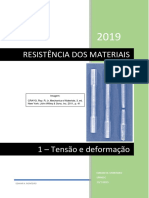
Nesta seo, descreve-se a formulao dinmica no linear geomtrica. Posteriormente, descreve-se o modelo de impacto adotado neste trabalho. A funo mudana de configurao uma funo matemtica cujo seu gradiente ir indicar a mudana de direo e comprimento de um vetor infinitesimal dx em um ponto x0 para dy em uma nova posio, no ponto y0 na configurao genrica. Conforme j comentado anteriormente, a formulao no linear geomtrica aqui descrita baseada no Mtodo dos Elementos Finitos (MEF), portanto a funo mudana de configurao necessita ser parametrizada por valores nodais e funes de forma. Seja um elemento finito, com grau de aproximao qualquer e sobre o qual se mapeia, por meio de funes de forma usuais, o contnuo a partir das posies (configurao inicial e atual) de pontos nodais, tendo o espao adimensional como base para o mapeamento numrico, conforme Figura 1.
( referncia )
(-1,1)
2
(1 1
f0
1
(-1,-1) (1,-1)
f1
(atual)
Figura 1 - Configuraes inicial e atual, mapeadas a partir de um mesmo espao adimensional.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 39
De acordo com a eq (1) podem-se criar dois mapeamentos f 0 e f1 de ( 1 , 2 ) para a configurao inicial e final do corpo respectivamente. Assim se escreve:
f f 01 2 A0 = 01 1 f 02 1 f 02 2
f f11 2 A1 = 11 1 f12 1 f12 2
(1)
sendo que em fij , j representa a direo x ou y e i representa o mapeamento 0 ou 1. Deve-se observar que:
k fij = k (1 , 2 ) X ij
(2)
k k X ij = 1 1 fij 2 = k k X ij 2
fij
(3)
(4)
tal que representa as funes de forma do elemento finito referentes ao n k . Assim, o gradiente da mudana de configurao total f , parametrizado por valores nodais e funes de forma, fica dado por:
A = A1 (1 , 2 ) A01 (1 , 2 )
(5)
Na implementao do cdigo computacional utiliza-se um elemento finito triangular com aproximao cbica, denominado elemento QST (ASSAN (1999)), conforme apresentado na Figura 2.
2
3 8 9 1 1 7
3 = 1 1 2
6 5 2
Figura 2 - Elemento triangular com 10 ns.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
40
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
De posse dos valores das derivadas das funes de forma nodais determinam-se os gradientes da funo mudana de configurao das posies inicial e atual, e posteriormente atravs da eq (5) o gradiente de f parametrizado por valores nodais e funes de forma. O conhecimento das expresses referentes s deformaes no lineares longitudinais e de distoro de extrema importncia para o entendimento da formulao no linear geomtrica adotada. As mesmas so apresentadas em funo do gradiente da funo mudana de configurao e consequentemente dos parmetros 1 e 2 . A deformao longitudinal de engenharia em relao configurao de referncia na direo u pode ser definida como:
(u, ) =
dy dx dx
= u A Au
t t
{ (
)}
1 2
(6)
Para se considerar a deformao x , faz-se u = {1 0} , enquanto que na deformao y tem-se u = {0 1} . Observa-se que esta medida no linear, pois o vetor u no paralelo ao r vetor v . De posse da expresso que define o ngulo , e fazendo com que u e u ' sejam ortogonais (logo = 2 ), calcula-se a distoro de engenharia:
xy
u At Au ' = = arc os (u ) u' 2 2
) ( )
(7)
sendo u e u ' dois vetores perpendiculares. A deformao xy dada por:
xy =
xy
2
(8)
Deve-se contar que esta medida de deformao objetiva, segundo OGDEN (1984).
2.1
Potencial de energia total
O funcional de energia potencial total pode ser escrito atravs de quatro tipos de energia, conforme eq (9):
= Ue P + K + Q
(9)
sendo que U e , P , K e Q representam a energia de deformao, energia potencial, energia cintica e energia de dissipao (ou perda de energia por amortecimento, GRECO (2004)), respectivamente.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 41
A energia de deformao fornecida atravs da integral da energia de deformao especfica ( ue ) em relao s posies e considerando o volume inicial.
U e = ue dV0
V0
(10)
A energia potencial para um sistema de foras concentradas conservativo escrita como:
P = Fi X i
(11)
sendo Fi as foras aplicadas e X i as coordenadas onde as cargas esto atuando. O ndice i referente ao grau de liberdade na qual fora e posio esto associados. Neste estudo so consideradas apenas cargas concentradas. A energia cintica dada por:
K=
1 &i x &i dV0 0 x 2V 0
(12)
&i e 0 na qual os termos x
representam as velocidades e a densidade de massa,
respectivamente. O termo de energia que representa a perda por amortecimento escrito j diferenciado em relao s posies nodais como:
Q q &i dV0 = dV0 = m 0 x X i V0 X i V0
(13)
tal que q representa o funcional de energia especfica dissipativa e m a constante de amortecimento proporcional. Substituindo as eqs (10)-(13) na eq (9) tem-se que:
= ue dV0 Fi X i +
V0
1 &i x &i dV0 + Q 0 x 2V 0
(14)
Aplicando-se o teorema da mnima energia potencial estacionria, na eq (14), em relao posio nodal X sk , sendo k o n e i a direo, tem-se:
u ( , X ) && l ( , X )dV + = e k i dV0 Fs + sk 0zl X z i 0 k X s V0 X s V0
V0
& l ( , X )dV = 0 z i 0 X
k m s l 0 z
(15)
simplificando a eq (15), encontra-se:
g=
U e + Finerc + Famort Fext = 0 X s
(16)
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
42
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
tal que as variveis U e X s , Finerc , Famort e Fext representam o vetor de foras internas, o vetor de fora inerciais, o vetor de foras referentes ao amortecimento e o vetor de foras externas respectivamente. A matriz de massa para cada elemento finito definida como:
M = sk 0zl dV0
V0
(17)
A equao de equilbrio dinmico pode ser escrita da seguinte forma:
g=
U e && + CX & =0 Fext + MX i i X i
(18)
2.2
Funcional de energia aproximado Newmark
A eq (18) diferencial nas variveis posio ( X ) e tempo ( t ), necessitando assim da utilizao de um algoritmo de integrao do tipo Newmark de forma a integr-la no tempo. Assim, escreve-se a eq (18) para um instante de tempo atual (S+1) como:
U e = X S +1 X S
&& + CX & =0 FS +1 + MX S +1 S +1
S +1
(19)
Na eq (19) o vetor de foras internas calculado de forma idntica ao problema esttico. O vetor de foras externas (carregamentos nodais) definido aqui para cada passo de tempo atravs da seguinte expresso:
C10t 2 3 FS +1 = F0 C1 + C2t + C3t + C4t + C5 sen(C6t ) + C7 cos(C8t ) + C9 e
(20)
na qual as constantes Ci so dados de entrada do programa e indicam o tipo de fora aplicada no instante de tempo t . Aplicam-se na equao de equilbrio, para um instante de tempo atual, as expresses de Newmark de posio e de velocidade aproximadas, dadas por:
& + t 2 1 X && && X S +1 = X S + tX s S + X S +1 2
(21)
& =X & + t (1 ) X && + tX && X S +1 S S S +1
(22)
sendo e constantes referentes ao mtodo de Newmark (GRECO, 2004) e t o intervalo de tempo. Nas eqs. (21) e (22), pode-se isolar a acelerao do passo de tempo atual e posteriormente substituir na equao dinmica de equilbrio (eq(19)), resultando em:
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 43
g ( X S +1 ) =
=
S +1
U t X
FS +1 +
S +1
C M X S +1 MQS + CRS + X 2 t t S +1
(23)
tCQS = 0
tal que os vetores QS e RS representam as contribuies dinmicas relativas ao passado (passo S ) e so dadas por:
QS =
& 1 && XS X S + + 1 X 2 t t 2 S
(24)
& + t (1 ) X && RS = X S S
(25)
Derivando-se a eq (19) novamente em relao posio atual chega-se a matriz hessiana para o problema dinmico.
2U t 2 0 = = g X ( ) X 2 X 2
1 +M + m 2 t t S +1 2U t X 2
(26)
sendo o primeiro termo
idntico ao determinado no captulo destinado a
S +1
formulao no linear geomtrica esttica.
2.3
Formulao numrica
Da mesma forma que no caso esttico, a equao que rege o equilbrio dinmico da estrutura, segundo a presente formulao, tambm de carter no linear e satisfeita pela configurao de equilbrio da mesma. Para encontrar a configurao de equilbrio, expande-se a eq (23) em srie de Taylor, truncada em termos lineares, chegando-se a:
0 = g ( X ) g X 0 + g X 0 X
( )
( )
(27)
A eq (27) pode ser trabalhada de forma a melhor se adequar ao mtodo de Newton-Raphson, como mostrado abaixo:
g X 0 X = g X 0
( )
( )
(28)
O vetor de resduos obtido a partir da eq (23), fazendo-se X 0 idntico ltima posio de equilbrio conhecida X 0 = X s0+1 . Para o incio do intervalo de tempo
X s0+1 = X s .
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
44
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
g X0 =
( )
U t X
FS +1 +
S +1
M C X S +1 MQS + CRS + X tCQS = 0 2 t t S +1
(29)
A partir da resoluo do sistema apresentado na eq (28) chegam-se as correes das posies X . Durante o processo iterativo, devem ser feitas correes
&& : nas posies X S +1 e nas aceleraes X S +1
X S +1 = X S + X
(30) (31)
&& = X S +1 Q X S +1 S t 2
Logo aps as correes de posio e acelerao, calculam-se as velocidades pela eq (22). De posse do vetor X , verifica-se se o mesmo suficientemente pequeno dentro de determinada tolerncia. Para isso, utiliza-se uma expresso denominada critrio de convergncia, que para este trabalho foi adotada a eq (32).
erro =
X X0
TOL
(32)
sendo que a norma euclidiana. Estando o critrio de convergncia satisfeito, muda-se para um novo passo de tempo. Para este novo passo os valores de passado ( S ) assumem os valores recm calculados ( S + 1) . importante ressaltar que, antes de dar incio ao processo iterativo assumemse valores iniciais para as variveis posio, velocidade e acelerao. Em se tratando de posio conveniente considerar as posies tanto de passado ( S ) como de presente ( S + 1) iguais posio inicial do corpo. No caso da velocidade e acelerao de passado, estas podem ser assumidas como nulas ou ento considerar uma velocidade inicial do corpo, onde a partir desta e atravs da eq (33) calcula-se a sua respectiva acelerao inicial.
&& = M 1 F CX & U t X 0 0 0 X 0
(33)
Para casos dinmicos, sem impacto, adota-se o Mtodo da Acelerao Mdia (ou da Regra Trapezoidal) por ser um mtodo reconhecidamente eficiente na soluo dinmica de estruturas convencionais (sem ocorrncia de impacto). Porm, de acordo com TAYLOR & PAPADOPOULOS (1993), o mesmo no apresenta a mesma eficincia em problemas com ocorrncia de impacto, especialmente em problemas com existncia de altas freqncias. Estes casos sero comentados na seo seguinte.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 45
2.4
Impacto de estruturas contra anteparos rgidos
Nesta seo apresenta-se o esquema adotado para a considerao do impacto na implementao computacional. Conforme j afirmado anteriormente, neste trabalho ser considerado o impacto, sem atrito, entre slidos bidimensionais e anteparos rgidos. O esquema de impacto adotado, baseado em GRECO (2004), consiste na limitao de posies dos ns impactantes da estrutura. De forma geral, considera-se o caso da Figura 3, onde a estrutura projtil encontra-se cercada pelos anteparos I, II, III, IV. Na situao de impacto, deve-se fazer a limitao das posies dos ns da estrutura projtil que satisfazem a condio para o impacto (eq (34)), fazendo com que as coordenadas ortogonais aos anteparos dos ns sejam igualadas as coordenadas do anteparo rgido. Portanto para os ns que sofrerem impacto deve-se fazer:
YN = YANTEPARO
sendo Y coordenadas horizontais ou verticais atuais do corpo.
(34)
Aplicando-se a metodologia adotada, na Tabela 1 encontram-se as condies para que ocorra impacto nos anteparos I, II, III e IV e as respectivas correes nas posies dos ns impactantes. Deve-se comentar que neste procedimento, ao se corrigir as posies nos ns de impacto o clculo das foras internas feito como anteriormente descrito, resultando em um desbalanceamento de foras Fext Fint = Fcont , que de forma indireta simula a tcnica do multiplicador de Lagrange descrita em GRECO (2004) e GRECO et al (2004).
Tabela 1 - Condies para existncia de impacto, e respectivas restries.
ANTEPARO I II III IV
CONDIO
LIMITAO
X N < X ANT I YN > YANT II X N > X ANT III YN < YANT IV
X N = X ANT I YN = YANT II X N = X ANT III YN = YANT IV
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
46
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
ANTEPARO II
ESTRUTURA PROJTIL
ANTEPARO III
ANTEPARO I
x ANTEPARO IV
Figura 3 - Impacto entre uma estrutura e um anteparo rgido.
Na Tabela 1, X representa direo horizontal e Y a vertical. Para se corrigir a instabilidade numrica gerada em problemas envolvendo impacto pode ser encontrada em HU (1997). No mesmo foi apresentado um algoritmo de integrao temporal que tem como base partir de uma hiptese relacionada com as aceleraes que se desenvolvem na regio de contato durante o impacto. O artigo prope um algoritmo que se enquadre na famlia de Newmark, que conforme determinado em GRECO (2004) corresponde ao algoritmo clssico com = 1,5 e
= 1, 0 .
EXEMPLOS DINMICOS COM OU SEM IMPACTO
Nesta seo analisam-se exemplos de validao para o programa no linear geomtrico dinmico implementado, com ou sem considerao de impacto, e cuja formulao encontra-se na seo 2. Para a visualizao dos resultados obtidos, atravs da formulao numrica posicional, utiliza-se o ps-processador do GMEC (Grupo de Mecnica Computacional) desenvolvido em PACCOLA & CODA (2005).
3.1
Exemplo 1 conjunto biela manivela
No primeiro exemplo dinmico, verifica-se a eficincia do programa na anlise de um conjunto biela-manivela (Figura 4). Este exemplo foi baseado em CODA et al (2005).
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 47
R1
LB
LM R2
B
BIELA
HB
MANIVELA
HM
Figura 4 - Esquema do conjunto biela-manivela.
Na Figura 14, o ponto A representa um n pertencente simultaneamente biela e a manivela enquanto que o ponto B representa o centro de giro do conjunto. A manivela composta por um retngulo com dimenses
HM
LM
e por
duas semi-circunferncias nas extremidades. Os pontos A e B ficam localizados no centro de cada extremidade (menores lados) do retngulo. Na anlise, o conjunto biela-manivela foi discretizado em 381 elementos e foram utilizados 6000 passos. A fora F = 1000 102 kg .cm / s 2 encontra-se aplicada durante o tempo em que a manivela permanece prxima posio de mximo aproveitamento de fora, ou seja, quando a biela forma um ngulo de 90 graus em relao manivela ou quando a biela est se afastando do pisto.
Quadro 1 - Condies para aplicao da carga
F.
14,10 < X C < 5,10 & 0 X C
Os parmetros do integrador de Newmark adotados foram = 0,55 e
= 0,30 .
No Quadro 1, apresentam-se as condies em que a fora F encontra-se aplicada, considerando-se o sistema de eixos (fixo) adotado na Figura 15. Os dados de entrada para o problema so apresentados no Quadro 2.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
48
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
Quadro 2 - Dados de entrada do exemplo 1.
E = 2,1109 kg / cm s 2 LB = 14, 4 cm H B = 2 cm hB = 1 cm (espessura) LM = 10, 0 cm H M = 2 R1 = 2 R2 = 9 cm hm = 1 cm (espessura) R1 = 4,5 cm R2 = 4,5 cm
= 0,00790 kg/cm3
cm = 5 s 1 t = 0,00025 s
= 0 (coeficiente de Poisson)
No Quadro 1, X C representa a posio horizontal do ponto de aplicao da carga F . No exemplo investigado o comportamento da velocidade angular do centro de giro do conjunto. Na Figura 5 encontra-se a soluo numrica obtida com a utilizao da formulao numrica posicional dinmica do deslocamento angular do centro de giro em funo do tempo. Na Figura 6 encontram-se as configuraes deslocadas do conjunto bielamanivela para alguns valores de tempo.
500
400
velocidade angular (rad/s)
300
200
100
0 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
t (s)
Figura 5 - Tempo x deslocamento do grau de liberdade vertical.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 49
LEGENDA DESLOC. HORIZONTAL
CONF. DESLOCADA PARA LEGENDA DESL. HORIZONTAL
CONF.DESLOCADA PARA LEGENDA DESL. VERTICAL
LEGENDA DESLOC. VERTICAL
t = 0, 0125 s
t = 0, 025 s
t = 0, 0325 s
Figura 6 - Tempo x deslocamento do grau de liberdade vertical.
3.2
Exemplo 2 - impacto de anel e anteparo rgido
Como segundo exemplo de impacto, analisa-se o caso do impacto entre uma malha anelar e um anteparo rgido horizontal (Figura 7). A estrutura se movimenta seguindo uma trajetria inclinada em relao ao anteparo e com velocidade constante. Este exemplo foi baseado em GRECO (2004). Neste exemplo, as variveis so consideradas adimensionais. Os dados de entrada para o problema so apresentados no Quadro 3. Na anlise, a estrutura anelar foi discretizada em 80 elementos finitos e foi adotado um intervalo de tempo igual a t = 0, 05 . Na Figura 8 apresenta-se a configurao deslocada da estrutura anelar para o caso sem atrito.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
50
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
Dext
& =2 X 1 & =2 X 2
Dint
Figura 7 - Esquema do impacto de anel e anteparo rgido.
LEG. DESLOC. HORIZONTAL
CONF. DESLOCADA HORIZONTAL
CONF. DESLOCADA VERTICAL
t =5s
t =5s
LEG. DESLOC. VERTICAL
t = 10 s
t = 10 s
t = 20 s
t = 20 s
Figura 8 - Configurao deslocada da estrutura anelar. Quadro 3 - Dados de entrada do exemplo 2.
= 0 (coeficiente de Poisson)
E = 100, 0 Dext = 20 Dint = 18 b = 1 (espessura) = 0, 01 cm = 0 s 1
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 51
3.3
Exemplo 10 impacto de um disco e anteparo rgido
Como segundo exemplo de impacto, analisa-se o caso do impacto entre um disco e um anteparo rgido horizontal (Figura 9). A estrutura se movimenta seguindo uma trajetria inclinada em relao ao anteparo e com velocidade constante.
& =4 X 1 & =4 X 2
Figura 9 - Esquema do impacto do disco e anteparo rgido.
LEGENDA DESLOC. HORIZONTAL
CONF. DESLOCADA PARA LEGENDA HORIZONTAL
CONF. DESLOCADA PARA LEGENDA VERTICAL
t =5s
t =5s
LEGENDA DESLOC. VERTICAL
t = 7,5 s
t = 7,5 s
t = 15 s
t = 15 s
Figura 10 - Configurao deslocada do disco.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
52
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
Os dados de entrada para o problema so apresentados no Quadro 4.
Quadro 4 - Dados de entrada do exemplo 3.
E = 100, 0 D = 20 b = 1 (espessura) = 0, 01 cm = 0 s 1 = 0,3 (coeficiente de Poisson)
Na anlise, o disco foi discretizada em 138 elementos finitos e foi adotado um intervalo de tempo igual a t = 0, 05 . Na Figura 10 apresenta-se a configurao deslocada do disco para o caso sem atrito e com coeficiente de Poisson = 0,3 .
CONCLUSES
Neste trabalho apresenta-se uma formulao dinmica no linear geomtrica para o estudo do comportamento dinmico no linear geomtrico de slidos bidimensionais. Para a considerao do comportamento no linear geomtrico, apresenta-se e aprimora-se uma formulao posicional esttica, desenvolvida em CODA (2003), para o tratamento de slidos bidimensionais considerando-se grandes deslocamentos. Expande-se a formulao NLG posicional para o caso dinmico com a incorporao, no cdigo computacional, de um algoritmo de integrao temporal baseado na famlia de integradores temporais de Newmark. A adoo do algoritmo de integrao temporal da Regra Trapezoidal se restringe a problemas envolvendo estruturas convencionais (sem considerao de impacto). Para o caso do exemplo da biela- manivela no se adota, para a considerao do problema dinmico, o algoritmo da Regra Trapezoidal e sim um algoritmo da famlia Newmark modificado atravs dos parmetros = 0,55 e = 0,30 . Os parmetros adotados neste exemplo so justificados em CODA et al (2005) por obter resultados mais estveis e precisos na anlise de mquinas em alta rotao. importante enfatizar que para estruturas com comportamento dinmico no convencionais (com considerao de impacto), a utilizao do algoritmo de integrao temporal da regra trapezoidal pode gerar respostas instveis. Estas instabilidades na soluo desaparecem quando o algoritmo de Newmark clssico ( = 0,5 e = 0, 25 ) substitudo pelo HU (1997) obtido a partir do algoritmo de Nermark modificado por GRECO (2004) ( = 1,5 e = 1, 0 ).
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Estudo e desenvolvimento de cdigo computacional baseado no mtodo dos elementos... 53
A incluso do impacto realizada atravs de um esquema simplificado, baseado em GRECO (2004), que consiste na limitao de posies dos ns impactantes da estrutura. Um ponto importante para o esquema de impacto implementado que para alguns exemplos importante a considerao de t pequeno, pois quando no so podem fazer com que exista um amortecimento numrico indesejvel que pode resultar em erro de fase. Este fenmeno pode ser explicado pelo fato do algoritmo de Newmark modificado ou de HU (1997) ser classificado em incondicionalmente estvel, para qualquer t existe resposta, e em convergente, quanto menor t a resposta converge para a resposta esperada. Com a incluso do impacto no cdigo computacional no linear geomtrico dinmico, o mesmo passa a ter a capacidade de analisar o impacto, sem atrito, entre slidos bidimensionais e anteparos rgidos. O cdigo no linear geomtrico com impacto testado atravs de exemplos existentes na literatura consultada, apresentando resultados muito bons quando comparados com a mesma ou com suas respectivas solues analticas. A formulao pode ser futuramente extendida para anlises mais complexas, como impacto entre estruturas e cascas.
REFERNCIAS
ASSAN, A. E. (2003). Mtodo dos Elementos Finitos: primeiros passos. 2. ed. Campinas: Editora UNICAMP. CODA, H. B. (2003). Anlise no linear geomtrica de slidos e estruturas: uma formulao posicional baseada no MEF. (Texto complementar para concurso de professor titular, SET-EESC-USP) CODA, H. B.; OLIVEIRA, M. G; PACCOLA, R. R. (2005). Simulao de motor a combusto utilizando formulao no linear geomtrica. In: CONGRESSO LATINO-AMERICANO DE MTODOS COMPUTACIONAIS EM ENGENHARIA, 26., Guarapari, Esprito Santo, 2005. GRECO, M. (2004). Anlise de problemas de contato/impacto em estruturas de comportamento no linear pelo Mtodo dos Elementos Finitos. So Carlos. Tese (Doutorado) Escola de Engenharia de So Carlos Universidade de So Paulo. HU, N. (1997). A solution method for dynamic contact problems. Computer & structures, v. 63, p.1053-1063. MARQUES, G. C. S. C. (2006). Estudo e desenvolvimento de cdigo computacional baseado no MEF para anlise dinmica no linear geomtrica de slidos bidimensionais. So Carlos. Dissertao (Mestrado) Escola de Engenharia de So Carlos Universidade de So Paulo. PACCOLA, R. R.; CODA, H. B. (2005). Desenvolvimento e disponibilizao de softwares acadmicos de anlise estrutural baseados no MEF, MEC e combinao de ambos. Relatrio Cientfico FAPESP, USP, So Carlos, So Paulo.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
54
Gustavo Cod dos Santos Cavalcanti Marques & Humberto Breves Coda
TAYLOR, R.L; PAPADOPOULOS, P. (1993). On the finite element method for dynamic contact/impact problems. International journal for numerical methods in engineering, v.36, p.2123-2140.
AGRADECIMENTOS
CAPES Coordenao de Aperfeioamento de Pessoal de Nvel Superior pelo suporte financeiro.
Cadernos de Engenharia de Estruturas, So Carlos, v. 10, n. 45, p. 37-54, 2008
Vous aimerez peut-être aussi
- Calculo Tranporte HelicoidalDocument40 pagesCalculo Tranporte HelicoidalJonasEBSPas encore d'évaluation
- Trabalho - Carregamento CombinadoDocument7 pagesTrabalho - Carregamento CombinadoSuzanaLeardiniLuchesiPas encore d'évaluation
- A14 - Dimensionamento de Válvulas de ControleDocument142 pagesA14 - Dimensionamento de Válvulas de Controleliliam_natsumePas encore d'évaluation
- Mod F1 - Sebenta PDFDocument22 pagesMod F1 - Sebenta PDFJoão PauloPas encore d'évaluation
- Fenômenos de Transportes. - Exercícios Resolvidos em 26 Nov 2013. - 01 ColunaDocument29 pagesFenômenos de Transportes. - Exercícios Resolvidos em 26 Nov 2013. - 01 ColunaAfonso Celso Siqueira Silva100% (10)
- Análise Por Elementos Finitos Pelo ANSYSDocument64 pagesAnálise Por Elementos Finitos Pelo ANSYSGuilherme MedeirosPas encore d'évaluation
- TDC Quarta Lista de Exercicios 2016 2 PDFDocument2 pagesTDC Quarta Lista de Exercicios 2016 2 PDFJhonnyBarbalho0% (1)
- MovimentoS VERTICAIS NO vÁCUO E CIRCULARESDocument6 pagesMovimentoS VERTICAIS NO vÁCUO E CIRCULARESanon-157064100% (1)
- Apostila de Trocadores de CalorDocument17 pagesApostila de Trocadores de CaloreleandroreispiresPas encore d'évaluation
- Tensao DeformaçãoDocument97 pagesTensao DeformaçãoAlexsander Costa50% (2)
- LUZ Um Pouco Mais de Mistério - Marcelo GleiserDocument3 pagesLUZ Um Pouco Mais de Mistério - Marcelo Gleiserzik100% (1)
- Lista10 ResolucaoDocument5 pagesLista10 ResolucaoxotunredmailtopPas encore d'évaluation
- Plano de Ensino - VibraçõesDocument5 pagesPlano de Ensino - VibraçõesFabricio VigolloPas encore d'évaluation
- Intro. Geotécnica Ensaio PMTDocument18 pagesIntro. Geotécnica Ensaio PMTPaloma SouzaPas encore d'évaluation
- Caraterização Acústica Da Casa Da Cultura de ÍlhavoDocument95 pagesCaraterização Acústica Da Casa Da Cultura de ÍlhavoManuel RibasPas encore d'évaluation
- A Descoberta Do EletronDocument7 pagesA Descoberta Do EletronSyara SantsPas encore d'évaluation
- 1) Explique Cada Parte Das Tirinhas A SeguirDocument2 pages1) Explique Cada Parte Das Tirinhas A Seguirtiago luza0% (1)
- Exercícios Leis de NewtonDocument3 pagesExercícios Leis de NewtonRafael AlisonPas encore d'évaluation
- 9 - Oleos e GordurasDocument7 pages9 - Oleos e GordurasAguirre FontouraPas encore d'évaluation
- Relatório 4 - Provas de Carga DinâmicaDocument4 pagesRelatório 4 - Provas de Carga DinâmicaTalita Beluffi de CamargoPas encore d'évaluation
- Escola Secundária de Tete-Teste Fisica 11 2023Document2 pagesEscola Secundária de Tete-Teste Fisica 11 2023Atall Nedita João PauloPas encore d'évaluation
- Estabilidade de Muros de ArrimoDocument11 pagesEstabilidade de Muros de Arrimomanassesmt50% (2)
- R1 AP1 Turma1 15 - Jun - 07Document1 pageR1 AP1 Turma1 15 - Jun - 07wagnercpcPas encore d'évaluation
- Aula 4 - Cinemática de Ponto Material - 2 - 3 - 1 Movimento Curvilíneo Parte 1 - 2Document13 pagesAula 4 - Cinemática de Ponto Material - 2 - 3 - 1 Movimento Curvilíneo Parte 1 - 2Eric Espíndola100% (1)
- 7 - Condutos Mec FluidosDocument73 pages7 - Condutos Mec FluidosJOAB SOBREIRA DE ANDRADEPas encore d'évaluation
- 3 Lista - Dinmica Les de NetonDocument7 pages3 Lista - Dinmica Les de NetonPedro SouzaPas encore d'évaluation
- Avaliação Do 2º Ano A e BDocument1 pageAvaliação Do 2º Ano A e BColunista S EveraldoPas encore d'évaluation
- Introdução Ás Propriedades Mecânicas Dos MateriaisDocument10 pagesIntrodução Ás Propriedades Mecânicas Dos MateriaisHenrique AlexandrinoPas encore d'évaluation
- Gases - 30 em 60Document4 pagesGases - 30 em 60Ellen Karine ChavesPas encore d'évaluation