Vous aimerez peut-être aussi
- ECE222 DP1 Binary MultiplierDocument8 pagesECE222 DP1 Binary Multiplierprasad357Pas encore d'évaluation
- Digital Pulse Counter - Two Digits: DescriptionDocument7 pagesDigital Pulse Counter - Two Digits: DescriptionAsgher KhattakPas encore d'évaluation
- CH 7Document23 pagesCH 7Anonymous 7WsOWImuPas encore d'évaluation
- Counters and Shift RegDocument24 pagesCounters and Shift RegRakesh Kumar D100% (1)
- CPR E 381x/382x Lab11aDocument10 pagesCPR E 381x/382x Lab11aHelenPas encore d'évaluation
- ADC TutorialDocument17 pagesADC TutorialNagabhushanam KoduriPas encore d'évaluation
- TMS320F2812-Analogue To Digital ConverterDocument26 pagesTMS320F2812-Analogue To Digital ConverterPantech ProLabs India Pvt LtdPas encore d'évaluation
- Circuit Can Be Used For Many PurposesDocument1 pageCircuit Can Be Used For Many PurposesAszhar Al AmbaryPas encore d'évaluation
- IR Sensor Based Distance Measurement SystemDocument5 pagesIR Sensor Based Distance Measurement SystemRajkeen ChamanshaikhPas encore d'évaluation
- Adc Lab Pic18Document23 pagesAdc Lab Pic18Bolarinwa Joseph100% (1)
- Unit - Iii MPMC-1Document79 pagesUnit - Iii MPMC-1gunda manasa100% (1)
- Quadrature Encoder Receiver Module: An Implementation On FPGADocument12 pagesQuadrature Encoder Receiver Module: An Implementation On FPGAสหายดิว ลูกพระอาทิตย์Pas encore d'évaluation
- Microcontroller2Document73 pagesMicrocontroller2pankaj gargPas encore d'évaluation
- Advanced Logic Circuits ProjectDocument13 pagesAdvanced Logic Circuits ProjectLymen LagumbayPas encore d'évaluation
- Analog-To-Digital Converter (ADC) Interfacing With MicrocontrollerDocument4 pagesAnalog-To-Digital Converter (ADC) Interfacing With MicrocontrollerSridhar DineshPas encore d'évaluation
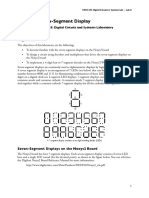
- 7-Segment Display & ADC Controls With 8051: LABORATORY - Experiment 5Document12 pages7-Segment Display & ADC Controls With 8051: LABORATORY - Experiment 5Vikas Ravi TPPas encore d'évaluation
- Mini Project Report-2Document26 pagesMini Project Report-2Remya Ramakrishnan0% (2)
- Digital Thermometer Using 8051 Microcontroller Project ReportDocument18 pagesDigital Thermometer Using 8051 Microcontroller Project Reportjs18ps56% (9)
- Chapter 5: Counters: Ee 202 Digital ElectronicsDocument59 pagesChapter 5: Counters: Ee 202 Digital ElectronicsSyazreen RahmanPas encore d'évaluation
- Digital ThermometerDocument12 pagesDigital Thermometershahpatel19Pas encore d'évaluation
- Table of Content: Digital OhmmeterDocument23 pagesTable of Content: Digital OhmmeterLow Koon Yee100% (1)
- Rotary Encoders - 0928Document17 pagesRotary Encoders - 0928tecnoelectronica789Pas encore d'évaluation
- PIC PPT 13104022 (4th Year)Document41 pagesPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- ADC InterfacingDocument37 pagesADC InterfacingSaurav ChaudharyPas encore d'évaluation
- Digital Thermometer Using 8051 PDFDocument3 pagesDigital Thermometer Using 8051 PDFAditya Prakash100% (1)
- Construction of Microcontroller Based Digital Voltmeter: Md. Imran Hossain Jony, Md. Moshiur RahmanDocument4 pagesConstruction of Microcontroller Based Digital Voltmeter: Md. Imran Hossain Jony, Md. Moshiur Rahmanshiva kumarPas encore d'évaluation
- Simple VFD DesignDocument13 pagesSimple VFD DesignMianShahzadKokabPas encore d'évaluation
- AVR242: 8-Bit Microcontroller Multiplexing LED Drive and A 4 X 4 KeypadDocument26 pagesAVR242: 8-Bit Microcontroller Multiplexing LED Drive and A 4 X 4 KeypadDemeter Robert Es IzabellaPas encore d'évaluation
- Applications of Handshake ModeDocument3 pagesApplications of Handshake Modevyshnu3006Pas encore d'évaluation
- Digital Voltmeter Using Pic MicrocontrollerDocument38 pagesDigital Voltmeter Using Pic MicrocontrollerTaramba kossiPas encore d'évaluation
- Adc InterfacingDocument17 pagesAdc Interfacing21ecuog059Pas encore d'évaluation
- NEC 022 External Paper SolutionDocument13 pagesNEC 022 External Paper SolutionSachin PalPas encore d'évaluation
- Adc PWMDocument26 pagesAdc PWMShivaram Reddy ManchireddyPas encore d'évaluation
- Analog To DigitalDocument46 pagesAnalog To DigitalSaleem HaddadPas encore d'évaluation
- Adcanddac 210216095501Document24 pagesAdcanddac 210216095501Kiran GPas encore d'évaluation
- Industrial Production Counter Using At89S52 MicrocontrollerDocument24 pagesIndustrial Production Counter Using At89S52 MicrocontrollerrajkiritiPas encore d'évaluation
- Analog To Digital ConversionDocument4 pagesAnalog To Digital ConversionAnkit MittalPas encore d'évaluation
- Lab 8Document8 pagesLab 8Anonymous yG7oj20% (1)
- ESD1Document227 pagesESD1Mr. RAVI KUMAR IPas encore d'évaluation
- Es 1Document60 pagesEs 1vamsi kiranPas encore d'évaluation
- Decode A Quadrature Encoder in SoftwareDocument4 pagesDecode A Quadrature Encoder in SoftwarerdiakurPas encore d'évaluation
- Laboratory Manual Course Code:Ece 201Document41 pagesLaboratory Manual Course Code:Ece 201Er Sacchu SrivastavaPas encore d'évaluation
- AN #35 - Low Cost LCD Frequency MeterDocument6 pagesAN #35 - Low Cost LCD Frequency Meterarroyo62Pas encore d'évaluation
- ADCDocument18 pagesADCYogha Satria LaksanaPas encore d'évaluation
- Digital Theromometer Using 8051Document17 pagesDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NPas encore d'évaluation
- Experiment No. 4 ADC PDFDocument16 pagesExperiment No. 4 ADC PDFRia Cordova0% (1)
- 6 Adc0804Document5 pages6 Adc0804esther_kakani919Pas encore d'évaluation
- Ee446 Embedded Systems Lab #01: InstructionsDocument4 pagesEe446 Embedded Systems Lab #01: InstructionsMuhammad ShafeeqPas encore d'évaluation
- Using Quadrature Encoders With E Series DAQ Boards: Application Note 084Document11 pagesUsing Quadrature Encoders With E Series DAQ Boards: Application Note 084Heriberto Flores AmpiePas encore d'évaluation
- National Institute of Technology, Rourkela: Embedded Systems LaboratoryDocument13 pagesNational Institute of Technology, Rourkela: Embedded Systems Laboratoryprateekkumardash2002Pas encore d'évaluation
- BER MeterDocument8 pagesBER Metersakti prasad nandaPas encore d'évaluation
- M4 Micro OneNoteDocument6 pagesM4 Micro OneNoteAryan RaiPas encore d'évaluation
- PIC Analog To Digital Converter TutorialDocument5 pagesPIC Analog To Digital Converter TutorialSharath MunduriPas encore d'évaluation
- Line Follower Robot Using 8051 Micro ControllerDocument34 pagesLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- Interfacing of 8051: Unit 4Document44 pagesInterfacing of 8051: Unit 4radhika patelPas encore d'évaluation
- Programming Pic Microcontrollers in Picbasic Pro - LCD Lesson 1 Cornerstone Electronics Technology and Robotics IiDocument15 pagesProgramming Pic Microcontrollers in Picbasic Pro - LCD Lesson 1 Cornerstone Electronics Technology and Robotics IiDomDoretoPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Projects With Microcontrollers And PICCD'EverandProjects With Microcontrollers And PICCÉvaluation : 5 sur 5 étoiles5/5 (1)
- DataDog - Nano - MusicDocument2 pagesDataDog - Nano - MusicalesysPas encore d'évaluation
- Power Lines Filters For SPSDocument6 pagesPower Lines Filters For SPSalesysPas encore d'évaluation
- An 221 Adding An ADC To A Raspberry PiDocument11 pagesAn 221 Adding An ADC To A Raspberry PialesysPas encore d'évaluation
- 277 - PI AmplifierDocument2 pages277 - PI AmplifieralesysPas encore d'évaluation
- Bd9397efv eDocument30 pagesBd9397efv eGiovanni Carrillo VillegasPas encore d'évaluation
- IT144 ICT WorkshopDocument4 pagesIT144 ICT WorkshopDeep ShakhiyaPas encore d'évaluation
- Configure Eap Tls Flow With IseDocument24 pagesConfigure Eap Tls Flow With IseKash BarlasPas encore d'évaluation
- Philips DVDR985 2022Document270 pagesPhilips DVDR985 2022Doru RazvanPas encore d'évaluation
- Adc 128 S 022Document29 pagesAdc 128 S 022Subhrajit MitraPas encore d'évaluation
- Critical System ValidationDocument13 pagesCritical System ValidationDheeraj SrinathPas encore d'évaluation
- EEL 4140 Lab ManualDocument136 pagesEEL 4140 Lab ManualalproviePas encore d'évaluation
- S221 NTLWDocument17 pagesS221 NTLWCarlos JimenezPas encore d'évaluation
- Robot Project NevonDocument5 pagesRobot Project NevonEr. Aditya KapoorPas encore d'évaluation
- Cics Abend CodesDocument825 pagesCics Abend Codesjoshna30Pas encore d'évaluation
- MSDN Mag 0710Document102 pagesMSDN Mag 0710AlexandrePas encore d'évaluation
- Clover Health PatentDocument20 pagesClover Health PatentCharles GrossPas encore d'évaluation
- SIP5 Operating V09.30 Manual C003-J enDocument290 pagesSIP5 Operating V09.30 Manual C003-J enMarcelo FukujiPas encore d'évaluation
- AO4486Document6 pagesAO4486senjinatorPas encore d'évaluation
- Oracle 1z0 1084 20 PDFDocument6 pagesOracle 1z0 1084 20 PDFSaquib.MahmoodPas encore d'évaluation
- Esab Caddy Tig-2200i Ac-Dc 718-xxx To 843-xxxDocument64 pagesEsab Caddy Tig-2200i Ac-Dc 718-xxx To 843-xxxhitano12100% (1)
- MMA WELDING PRODUCT REPAIR PROCESS OF GYSMI 160P 1 - 16. Auteur - Alexis Gillet Date - 30 - 06 - 2016.Document16 pagesMMA WELDING PRODUCT REPAIR PROCESS OF GYSMI 160P 1 - 16. Auteur - Alexis Gillet Date - 30 - 06 - 2016.jakalae5263Pas encore d'évaluation
- CST307Document12 pagesCST307Ajnamol N RPas encore d'évaluation
- Arithmetic Logic UnitDocument5 pagesArithmetic Logic UnitNarendra AchariPas encore d'évaluation
- Lab Manual LicDocument66 pagesLab Manual LicUppum Mulakam FansPas encore d'évaluation
- Chapter 4 - Asynchronous MOD Up CountersDocument7 pagesChapter 4 - Asynchronous MOD Up CountersMinh PhúPas encore d'évaluation
- System Physical ArchitectureDocument5 pagesSystem Physical ArchitectureSanjay SharmaPas encore d'évaluation
- Laboratory 2 BEEDocument11 pagesLaboratory 2 BEE22-03844Pas encore d'évaluation
- Technology Concepts1Document9 pagesTechnology Concepts1drosbeastPas encore d'évaluation
- 25Q32BVDocument78 pages25Q32BVVictor GarciaPas encore d'évaluation
- Things To Know : Instruction Format Instructions Can Have 1, 2 or No OperandsDocument9 pagesThings To Know : Instruction Format Instructions Can Have 1, 2 or No OperandsMS. AYESHA SIDDIKA TONNYPas encore d'évaluation
- 18 DiplexorDocument3 pages18 DiplexorFernando GutiérrezPas encore d'évaluation
- 5500-192 Power Strip LEVITONDocument3 pages5500-192 Power Strip LEVITONEdwin G Garcia ChPas encore d'évaluation
- LGD Lm238wf1-Sla1 PDFDocument34 pagesLGD Lm238wf1-Sla1 PDFAgdael DominguezPas encore d'évaluation
- Historico Doc. Por Tipo Doc - HistoDocument2 pagesHistorico Doc. Por Tipo Doc - HistoLeandro FariaPas encore d'évaluation