Vous aimerez peut-être aussi
- Electrical Diagnostic Strategies VideosDocument9 pagesElectrical Diagnostic Strategies VideosVuong PhanPas encore d'évaluation
- 24VDC 24VDC S9-L S9-L S9-N S9-N: Eplan Output Relay ImaeDocument1 page24VDC 24VDC S9-L S9-L S9-N S9-N: Eplan Output Relay ImaeVuong PhanPas encore d'évaluation
- Car Wiper MechanismDocument64 pagesCar Wiper MechanismSarvaPas encore d'évaluation
- 2 ZZwiringDocument3 pages2 ZZwiringVuong PhanPas encore d'évaluation
- 24VDC 24VDC S9-L S9-L S9-N S9-N: Eplan Output Relay ImaeDocument1 page24VDC 24VDC S9-L S9-L S9-N S9-N: Eplan Output Relay ImaeVuong PhanPas encore d'évaluation
- New Microsoft Word DocumentDocument8 pagesNew Microsoft Word DocumentVuong PhanPas encore d'évaluation
- Eplan 380V Power Supply Imae: Ed Vuong + Date Ultrasonic Power Appr Replacement of 5 15/4/2020Document1 pageEplan 380V Power Supply Imae: Ed Vuong + Date Ultrasonic Power Appr Replacement of 5 15/4/2020Vuong PhanPas encore d'évaluation
- Khi Cu Dien - Ket Cau Su Dung Sua ChuaDocument348 pagesKhi Cu Dien - Ket Cau Su Dung Sua ChuaVuong PhanPas encore d'évaluation
- 24VDC Com 24VDC Com: / Page 2.1 / Page 4.0Document1 page24VDC Com 24VDC Com: / Page 2.1 / Page 4.0Vuong PhanPas encore d'évaluation
- Crane Pocket Book Nam 2017Document32 pagesCrane Pocket Book Nam 2017Kike Garza100% (1)
- Research On Lane Detection Technology Based On Opencv: Xu Yang, Zhang LingDocument4 pagesResearch On Lane Detection Technology Based On Opencv: Xu Yang, Zhang LingSahilModiPas encore d'évaluation
- Ignition SystemDocument3 pagesIgnition SystemVuong PhanPas encore d'évaluation
- VidDocument1 pageVidVuong PhanPas encore d'évaluation
- Topic of Speaking English - NhânDocument9 pagesTopic of Speaking English - NhânVuong PhanPas encore d'évaluation
- 2001 Ranger EV Wiring DiagramDocument395 pages2001 Ranger EV Wiring Diagrammayelewo100% (1)
- On-Board Diagnostics (OBD) Is AnDocument17 pagesOn-Board Diagnostics (OBD) Is AnVuong PhanPas encore d'évaluation
- Vios 2006Document1 pageVios 2006Vuong PhanPas encore d'évaluation
- Hinh 27.9Document1 pageHinh 27.9Vuong PhanPas encore d'évaluation
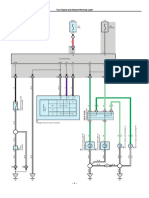
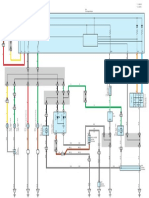
- Turn Signal and Hazard Warning LightDocument4 pagesTurn Signal and Hazard Warning LightVuong PhanPas encore d'évaluation
- Camry 2006Document1 pageCamry 2006Vuong PhanPas encore d'évaluation
- Z AudirDocument4 pagesZ AudirVuong PhanPas encore d'évaluation
- Chu de Noi B1 Hoan ChinhDocument6 pagesChu de Noi B1 Hoan ChinhVuong PhanPas encore d'évaluation
- Marine Engine Starting Methods GuideDocument30 pagesMarine Engine Starting Methods GuideVuong PhanPas encore d'évaluation
- Bài Tập Về Đại Từ Nhân XưngDocument46 pagesBài Tập Về Đại Từ Nhân XưngVuong PhanPas encore d'évaluation
- Formulas for stress, strain, density, and fluid flowDocument7 pagesFormulas for stress, strain, density, and fluid flowVuong PhanPas encore d'évaluation
- Engine Control Systems Operation: Model 3620Document2 pagesEngine Control Systems Operation: Model 3620Vuong PhanPas encore d'évaluation
- IgnitionDocument10 pagesIgnitionTeo Deustch100% (1)
- PhuongDocument1 pagePhuongVuong PhanPas encore d'évaluation
- Robotic Vision: CRICOS No. 00213JDocument1 pageRobotic Vision: CRICOS No. 00213JVuong PhanPas encore d'évaluation
- Engine Control Systems Operation: Model 3620Document2 pagesEngine Control Systems Operation: Model 3620Vuong PhanPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)