Vous aimerez peut-être aussi
- Armónicas en Sistemas Eléctricos IndustrialesD'EverandArmónicas en Sistemas Eléctricos IndustrialesÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Codificadores Angulares y LinealesDocument16 pagesCodificadores Angulares y LinealesSERGIO BAILON67% (9)
- Moduladores HidraulicosDocument30 pagesModuladores HidraulicosCarlos Bautista0% (1)
- Seguidor de LineaDocument13 pagesSeguidor de LineaKevin Alejandro100% (1)
- PRACTICA 2: Uso de La Barita Como Material Densificante en Lodos de Perforación y Métodos para Su Evaluación y Control.Document7 pagesPRACTICA 2: Uso de La Barita Como Material Densificante en Lodos de Perforación y Métodos para Su Evaluación y Control.Juan RuizPas encore d'évaluation
- Guia Ejercicios FlotacionDocument12 pagesGuia Ejercicios Flotacionjvchique100% (2)
- Sensor de RPM y Pms FredyDocument20 pagesSensor de RPM y Pms FredyFredy Puma100% (1)
- Sensores de Velocidad de RotaciónDocument4 pagesSensores de Velocidad de RotaciónAnderson HuivinPas encore d'évaluation
- Sensores RPMDocument8 pagesSensores RPMJorge DoctorovichPas encore d'évaluation
- Actuadores y Sensores en El AutomovilDocument77 pagesActuadores y Sensores en El AutomovilGatzu ChavezPas encore d'évaluation
- Sensores en El AutomóvilDocument17 pagesSensores en El AutomóvilRommel TorocahuaPas encore d'évaluation
- 02 Tipos de SensoresDocument25 pages02 Tipos de SensoresJosé ÁlvarezPas encore d'évaluation
- Sensor de VelocidadDocument16 pagesSensor de VelocidadJefferson ElbreyPas encore d'évaluation
- Sensor CKPDocument11 pagesSensor CKPAndres Restrepo50% (2)
- Sensores AutomotricesDocument96 pagesSensores AutomotricesJm KamachoPas encore d'évaluation
- Sensor de Posicion de AceleradorDocument96 pagesSensor de Posicion de AceleradorFitner Soto Paccori100% (1)
- Resolvers y TacómetroDocument13 pagesResolvers y TacómetroMariluz YipPas encore d'évaluation
- Informe de SensoresDocument13 pagesInforme de SensoresricardogePas encore d'évaluation
- Inyección Electronica - Guia de Estudio - 42 PáginasDocument43 pagesInyección Electronica - Guia de Estudio - 42 PáginasJuanjo MendozaPas encore d'évaluation
- Control Del Sistema Con EDCDocument7 pagesControl Del Sistema Con EDCRommel TorocahuaPas encore d'évaluation
- TesisJuanCarlos HernandezDocument23 pagesTesisJuanCarlos HernandezYareli Yenisey Márquez MoralesPas encore d'évaluation
- Sensores Taco-Métricos de Caja de CambiosDocument3 pagesSensores Taco-Métricos de Caja de Cambiosleonardo gomezPas encore d'évaluation
- Common RailDocument4 pagesCommon RailMarco TrejoPas encore d'évaluation
- Los Sensores Del Automovil BOSCHDocument8 pagesLos Sensores Del Automovil BOSCHJaime Mauricio González Guzmán100% (1)
- ABSDocument22 pagesABSdanilo peñaPas encore d'évaluation
- Sensores de Frecuencias Maquinas CaterpillarDocument2 pagesSensores de Frecuencias Maquinas Caterpillarsafer8709Pas encore d'évaluation
- Los Sensores ABSDocument4 pagesLos Sensores ABSDaniel RgzPas encore d'évaluation
- Control Del Sistema Con EDCDocument12 pagesControl Del Sistema Con EDCElias Salgueiro FloresPas encore d'évaluation
- Programa Del CursoDocument75 pagesPrograma Del Cursovinicio palaciosPas encore d'évaluation
- Taco MetroDocument23 pagesTaco Metrosergio_choqquePas encore d'évaluation
- Sensores AutomotrizDocument48 pagesSensores AutomotrizJimenez Gutierrez75% (4)
- Sensores Tacométricos de Cajas de CambiosDocument2 pagesSensores Tacométricos de Cajas de CambiosAldo CMPas encore d'évaluation
- Laboratorio 9Document12 pagesLaboratorio 9Nicolas Velasquez TorresPas encore d'évaluation
- Servomotores de Corriente ContinuaDocument13 pagesServomotores de Corriente ContinuaYonathan MirakianPas encore d'évaluation
- Sensores Lineales de PosiciónDocument3 pagesSensores Lineales de PosiciónFabian MoyaPas encore d'évaluation
- Tipos de Sensores Lineales de PosiciónDocument3 pagesTipos de Sensores Lineales de PosiciónFabian MoyaPas encore d'évaluation
- VelocidadDocument3 pagesVelocidadSfi Juan CaicedoPas encore d'évaluation
- D Ie2 16 Combinados SensoresDocument40 pagesD Ie2 16 Combinados SensoresWashingtonPas encore d'évaluation
- Laboratorio de ElectrónicaDocument13 pagesLaboratorio de ElectrónicaCAMPILI Gian LucaPas encore d'évaluation
- Tipos de Sensores ABSDocument6 pagesTipos de Sensores ABSDarkzito GT67% (3)
- Descripcion de Sensores y ActuadoresDocument27 pagesDescripcion de Sensores y ActuadoresDauødhårø Deivis100% (1)
- La Medición de La Velocidad en La IndustriaDocument4 pagesLa Medición de La Velocidad en La IndustriaAbraham Alejandro Lopez MoralesPas encore d'évaluation
- Actividad I-2 Neum e Hidr CecyteDocument11 pagesActividad I-2 Neum e Hidr CecyteMartínez Toledo Jacob IsaiPas encore d'évaluation
- Direccion Electro AsistidaDocument21 pagesDireccion Electro Asistidamemo velascoPas encore d'évaluation
- Tacometro y EncodersDocument14 pagesTacometro y EncodersDexter ThompsonPas encore d'évaluation
- Tipos de Sensores ABS Velocidad de Rueda - Blog Técnico Automotriz PDFDocument10 pagesTipos de Sensores ABS Velocidad de Rueda - Blog Técnico Automotriz PDFYdelkadiasmela DominguezmorelPas encore d'évaluation
- Sistemas EPSDocument88 pagesSistemas EPSJuan GarcPas encore d'évaluation
- SensorHall MEC 2019Document13 pagesSensorHall MEC 2019Ivan ChoquePas encore d'évaluation
- 4.1. - Sensores, Actuadores, MódulosDocument75 pages4.1. - Sensores, Actuadores, MódulosCesar GuamanPas encore d'évaluation
- Sensores InternosDocument6 pagesSensores InternosJohn Bravo SánchezPas encore d'évaluation
- Sensor AbsDocument34 pagesSensor AbsUchija Sasuke100% (2)
- TP1 - Lia CarlosDocument7 pagesTP1 - Lia CarlosSebastian AgueroPas encore d'évaluation
- Sensores de VelocidadDocument39 pagesSensores de VelocidadPeralta PeraltaPas encore d'évaluation
- TorqueDocument7 pagesTorqueoscar100% (1)
- Elementos Del Sistema Abs PDFDocument6 pagesElementos Del Sistema Abs PDFWilser NeyraPas encore d'évaluation
- Elementos Del Sistema Abs PDFDocument6 pagesElementos Del Sistema Abs PDFWilser NeyraPas encore d'évaluation
- El Sensor VSS PDFDocument29 pagesEl Sensor VSS PDFOrlando Zaldivar67% (3)
- TacómetroDocument14 pagesTacómetroPablo AvelinoPas encore d'évaluation
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209D'EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Évaluation : 5 sur 5 étoiles5/5 (2)
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoD'EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoÉvaluation : 4 sur 5 étoiles4/5 (4)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoD'EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoPas encore d'évaluation
- Montaje y mantenimiento de transformadores. ELEE0109D'EverandMontaje y mantenimiento de transformadores. ELEE0109Pas encore d'évaluation
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaD'EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaPas encore d'évaluation
- Teorema SuperposicionDocument14 pagesTeorema SuperposicionWalter Hurtado ToroPas encore d'évaluation
- Actividad Del SenaDocument1 pageActividad Del SenaWalter Hurtado ToroPas encore d'évaluation
- Tacometro SapitoDocument44 pagesTacometro SapitoWalter Hurtado ToroPas encore d'évaluation
- Actividades Complementarias U1Document22 pagesActividades Complementarias U1Karina Leal50% (4)
- Esquemas Eléctricos 2Document13 pagesEsquemas Eléctricos 2Walter Hurtado ToroPas encore d'évaluation
- LIVE Script-Practica 2Document2 pagesLIVE Script-Practica 2Maria Fernanda SandovalPas encore d'évaluation
- Hoja de Trabajo No 1 Momento de Una Fuerza Equilibrio de Un Cuerpo Rígido en El Plano XY y 3DDocument11 pagesHoja de Trabajo No 1 Momento de Una Fuerza Equilibrio de Un Cuerpo Rígido en El Plano XY y 3DLaw PlayPas encore d'évaluation
- FISIOLOGÍA RENAL - F.Contreras - 2009 (CORREGIDA Nov-8)Document151 pagesFISIOLOGÍA RENAL - F.Contreras - 2009 (CORREGIDA Nov-8)fernando-contreras-9279Pas encore d'évaluation
- Opt Oprs MNSDocument72 pagesOpt Oprs MNSandgundPas encore d'évaluation
- Clasificación de Los Tipos de ErosiónDocument3 pagesClasificación de Los Tipos de ErosióncarlosPas encore d'évaluation
- Informe Final Del ChochoDocument5 pagesInforme Final Del ChochoGustavo BalarezoPas encore d'évaluation
- BentonitaDocument2 pagesBentonitaJuan Paco100% (1)
- Metalurgia Del OroDocument2 pagesMetalurgia Del OroJuan Pablo Huanca RamosPas encore d'évaluation
- Escala Pain DetectDocument5 pagesEscala Pain DetectAC Jorge100% (1)
- Guía para Trabajo Flexible GEOMETRIA 2020Document2 pagesGuía para Trabajo Flexible GEOMETRIA 2020Leonardo CarilloPas encore d'évaluation
- Cómo Fotografiar Un Cielo Lleno de Estrellas PDFDocument2 pagesCómo Fotografiar Un Cielo Lleno de Estrellas PDFKe_rulePas encore d'évaluation
- Becattini, Del Distrito Industrial Marshaliano A La Teoría Del DistritoDocument24 pagesBecattini, Del Distrito Industrial Marshaliano A La Teoría Del Distritoneryeyeyhbs100% (1)
- 05 QuimicaDocument33 pages05 QuimicaCristiam MercadoPas encore d'évaluation
- Anál - Circ.malla-Thev-Superp. - Unidad 3Document3 pagesAnál - Circ.malla-Thev-Superp. - Unidad 3Diego Alejandro Gallardo IbarraPas encore d'évaluation
- Tarea MetereologiaDocument17 pagesTarea MetereologiaJhorel E. AncoPas encore d'évaluation
- Calculos para El Diseño Del Nucleo en ColumnasDocument7 pagesCalculos para El Diseño Del Nucleo en ColumnasKarianaSmitterPas encore d'évaluation
- Especificaciones Tecnicas FibraDocument8 pagesEspecificaciones Tecnicas FibraHumberto ArteagaPas encore d'évaluation
- Clase 1Document90 pagesClase 1Jose RodriguezPas encore d'évaluation
- SCR2Document24 pagesSCR2David Diaz-Perona Romero100% (1)
- Tarea Estadistica IIDocument3 pagesTarea Estadistica IIMauricio ChinchillaPas encore d'évaluation
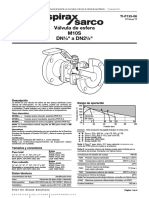
- Ficha Tecnica m10s SPIRAX SARCODocument4 pagesFicha Tecnica m10s SPIRAX SARCOLuis Enrique Torres Tone0% (1)
- 2 Analisis de TensionesDocument17 pages2 Analisis de TensionesBentura VenturaPas encore d'évaluation
- Ejercicios DiodosDocument7 pagesEjercicios DiodosYuliana ArangoPas encore d'évaluation
- Method - 5 - 2020 - 12 - 07 - 0 ESDocument52 pagesMethod - 5 - 2020 - 12 - 07 - 0 ESAngel HuacánPas encore d'évaluation
- Proyeccion Oferta y DemandaDocument8 pagesProyeccion Oferta y DemandaBelénTorres100% (2)
- TESIS Cahuana Coaquira Roger EmersonDocument143 pagesTESIS Cahuana Coaquira Roger EmersonmagnoliaPas encore d'évaluation
- Trabajo Fisica Exp 1,2 y 3 2.0Document19 pagesTrabajo Fisica Exp 1,2 y 3 2.0danielibanezcucPas encore d'évaluation