Vous aimerez peut-être aussi
- Design and applications of fuzzy logic PID controllerDocument19 pagesDesign and applications of fuzzy logic PID controllerPriya BhardwajPas encore d'évaluation
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- SoLucion ControlDocument63 pagesSoLucion Controllurafa1Pas encore d'évaluation
- Advanced Temperature Measurement and Control, Second EditionD'EverandAdvanced Temperature Measurement and Control, Second EditionPas encore d'évaluation
- Master Mechanical Engineering - Design Heat Recovery Steam Generator (HRSG) Combined Cycle Power PlantsDocument4 pagesMaster Mechanical Engineering - Design Heat Recovery Steam Generator (HRSG) Combined Cycle Power PlantsAlessandro BalduzziPas encore d'évaluation
- Poiseuille Flow: An Internet Book On Fluid DynamicsDocument4 pagesPoiseuille Flow: An Internet Book On Fluid DynamicsFelix EzomoPas encore d'évaluation
- Signal Flow GraphDocument38 pagesSignal Flow Graphgaurav_juneja_4Pas encore d'évaluation
- Chapter 3 - Batch ProcessesDocument54 pagesChapter 3 - Batch ProcessesMuhamad Hazim Zaaba100% (1)
- Perfect Your Process: A Guide To Temperature Control in Manufacturing ProcessesDocument31 pagesPerfect Your Process: A Guide To Temperature Control in Manufacturing ProcesseskitofanecoPas encore d'évaluation
- Optimize PID Controller Tuning for Process Control SystemsDocument62 pagesOptimize PID Controller Tuning for Process Control SystemsHuy Nguyen LuongPas encore d'évaluation
- Rate LawsDocument19 pagesRate LawsEli BerkowitzPas encore d'évaluation
- Electrical Power SystremDocument8 pagesElectrical Power SystremSagar ThotaPas encore d'évaluation
- Signal Flow DiagramsDocument20 pagesSignal Flow DiagramsSingappuliPas encore d'évaluation
- Control of Multivariable ProcessesDocument38 pagesControl of Multivariable Processessalvador2mePas encore d'évaluation
- Breaking From Tradition - Model Based Control vs. PIDDocument7 pagesBreaking From Tradition - Model Based Control vs. PIDshivnairPas encore d'évaluation
- Process Dynamics and Control, Ch. 24 Solution ManualDocument27 pagesProcess Dynamics and Control, Ch. 24 Solution ManualBen Spearman100% (1)
- Bonga BeDocument22 pagesBonga BeSpicyPas encore d'évaluation
- Level Measurement: Spring 2019Document23 pagesLevel Measurement: Spring 2019ULAGANATHAN MPas encore d'évaluation
- PBRDocument19 pagesPBRdarvyneePas encore d'évaluation
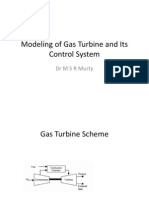
- Lecture 28 Modeling of GTDocument59 pagesLecture 28 Modeling of GTCindy CarvalhoPas encore d'évaluation
- Process Control and InstrumentationDocument7 pagesProcess Control and Instrumentationapi-201334376Pas encore d'évaluation
- Tuning A PID Controller: Guillermo J. CostaDocument6 pagesTuning A PID Controller: Guillermo J. CostaDeepak RainaPas encore d'évaluation
- Real-World-Modeling PDFDocument12 pagesReal-World-Modeling PDFGATOMICOPas encore d'évaluation
- Introduction and Basic Concepts: MAE 320-Chapter 1Document10 pagesIntroduction and Basic Concepts: MAE 320-Chapter 1Abdu AbdoulayePas encore d'évaluation
- 3C Chapter3 Sec.3.6 Color PDFDocument13 pages3C Chapter3 Sec.3.6 Color PDFsarmedPas encore d'évaluation
- 7.1.prob - Sheet Gas Power CyclesDocument3 pages7.1.prob - Sheet Gas Power CyclesAnonymous mXicTi8hB0% (1)
- EAs 4 BDocument7 pagesEAs 4 BRaza TabasamPas encore d'évaluation
- Modelling and Simulation of Industrial ProcessesDocument1 pageModelling and Simulation of Industrial ProcessesCésar SandovalPas encore d'évaluation
- Ejercicos Van WylenDocument11 pagesEjercicos Van WylenJorgeJiménezPas encore d'évaluation
- PID Theory ExplainedDocument9 pagesPID Theory ExplainedMansen NsubugaPas encore d'évaluation
- Mass Transfer Operations II Rr320801Document8 pagesMass Transfer Operations II Rr320801Nagwa MansyPas encore d'évaluation
- National Certification Examination 2005: General InstructionsDocument12 pagesNational Certification Examination 2005: General InstructionsRupesh ParadePas encore d'évaluation
- 58202-mt - Advanced Process ControlDocument2 pages58202-mt - Advanced Process ControlSRINIVASA RAO GANTAPas encore d'évaluation
- Test 3 Solution 2012 PDFDocument3 pagesTest 3 Solution 2012 PDFManishaa Varatha RajuPas encore d'évaluation
- 2500 KW Forced Draft Cooling TowerDocument2 pages2500 KW Forced Draft Cooling Towerleojay24Pas encore d'évaluation
- Flow CalculationsDocument22 pagesFlow CalculationsJay VoraPas encore d'évaluation
- Process Dynamics and Control SolutionsDocument27 pagesProcess Dynamics and Control Solutionsciotti6209100% (2)
- Automizing The Design of Francis Turbine Spiral CaseDocument10 pagesAutomizing The Design of Francis Turbine Spiral CaseGökhan ÇiçekPas encore d'évaluation
- CFD Model of Active Flow Control by Jets in A Two-Dimensional DiffuserDocument27 pagesCFD Model of Active Flow Control by Jets in A Two-Dimensional DiffuserK PedersenPas encore d'évaluation
- Paper-4 SetB Key Final 8may2009Document10 pagesPaper-4 SetB Key Final 8may2009chkk.ramakumarPas encore d'évaluation
- S L Dixon Fluid Mechanics and Thermodynamics of TurbomachineryDocument4 pagesS L Dixon Fluid Mechanics and Thermodynamics of TurbomachineryAbel AziePas encore d'évaluation
- Maximizing Volume of A Water Tank Cylindrical and RectangularDocument32 pagesMaximizing Volume of A Water Tank Cylindrical and RectangularRenaldo RamjohnPas encore d'évaluation
- Adaptive Generic Model Control: Dual Composition Control of DistillationDocument11 pagesAdaptive Generic Model Control: Dual Composition Control of DistillationYlm PtanaPas encore d'évaluation
- CHE3162 2015 Exam Paper SOLUTIONS v2 MoodleDocument21 pagesCHE3162 2015 Exam Paper SOLUTIONS v2 MoodleMashroof AhmedPas encore d'évaluation
- Second order system step response analysisDocument13 pagesSecond order system step response analysisZaidoon MohsinPas encore d'évaluation
- En Analysis of Thermal Efficiency Limit of Steam Methane Reforming ProcessDocument8 pagesEn Analysis of Thermal Efficiency Limit of Steam Methane Reforming ProcessAgam HanasichulaPas encore d'évaluation
- CISE301 Topic8L4&5Document36 pagesCISE301 Topic8L4&5Mohammad RameezPas encore d'évaluation
- Chemical ProcessDocument43 pagesChemical ProcesstavolenPas encore d'évaluation
- Refrigeration Unit (DONE)Document33 pagesRefrigeration Unit (DONE)Eimint Mansor Applez100% (1)
- PMS Theory Chapter3Document47 pagesPMS Theory Chapter3moulitechPas encore d'évaluation
- Applications of Hydraulics&Pneumatics: Session 14Document33 pagesApplications of Hydraulics&Pneumatics: Session 14Zippygroup ZsgPas encore d'évaluation
- Lecture 5-2 Signal Flow Graphs PDFDocument60 pagesLecture 5-2 Signal Flow Graphs PDFالبياتي محمدPas encore d'évaluation
- Smart Valve Flow ConditionersDocument4 pagesSmart Valve Flow ConditionersMuzammil HussainPas encore d'évaluation
- P-I-D Controller Literature ReviewDocument12 pagesP-I-D Controller Literature ReviewMalek Marry AnnePas encore d'évaluation
- PID Theory Explained, Komplett PDFDocument5 pagesPID Theory Explained, Komplett PDFThierry BaudorrePas encore d'évaluation
- Exp - P9 - Pressure ControlDocument9 pagesExp - P9 - Pressure ControlPriyanshu LilhaPas encore d'évaluation
- Acfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnDocument40 pagesAcfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnMOHAMED THARIKPas encore d'évaluation
- 01 Feedback and Temperature ControlDocument1 page01 Feedback and Temperature ControlMelchor VasquezPas encore d'évaluation
- Sensorsinautomobiles 141008081000 Conversion Gate01Document35 pagesSensorsinautomobiles 141008081000 Conversion Gate01LakshmiPas encore d'évaluation
- Humidity Measurement: Instrumentation Engineering DepartmentDocument24 pagesHumidity Measurement: Instrumentation Engineering DepartmentLakshmiPas encore d'évaluation
- Foli Ap 1-1Document4 pagesFoli Ap 1-1LakshmiPas encore d'évaluation
- IPI UNIT 2 Level MeasurementDocument21 pagesIPI UNIT 2 Level MeasurementLakshmiPas encore d'évaluation
- Lecture9 p3 17Document15 pagesLecture9 p3 17Macbook ProPas encore d'évaluation
- 6 Log Anti Log AmplifiersDocument32 pages6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- Engineering MetrologyDocument157 pagesEngineering MetrologyKr Ish Na100% (2)
- Forcemeasurement 150627102332 Lva1 App6891Document23 pagesForcemeasurement 150627102332 Lva1 App6891LakshmiPas encore d'évaluation
- PDCDocument158 pagesPDCLakshmiPas encore d'évaluation
- Ipi Unit 2 Flow MeasurementDocument19 pagesIpi Unit 2 Flow MeasurementLakshmiPas encore d'évaluation
- Lab Manual AdslatestDocument62 pagesLab Manual AdslatestLakshmiPas encore d'évaluation
- IPI Unit Consistency Measurement DevicesDocument18 pagesIPI Unit Consistency Measurement DevicesLakshmiPas encore d'évaluation
- ElecReadingII Motors PDFDocument11 pagesElecReadingII Motors PDFLakshmiPas encore d'évaluation
- Lecture NotesDocument136 pagesLecture Notestoymaker09Pas encore d'évaluation
- Virtual Instrumentation.Document7 pagesVirtual Instrumentation.LakshmiPas encore d'évaluation
- FilterDocument4 pagesFilterJohny AugustPas encore d'évaluation
- PID Sessoin 1Document27 pagesPID Sessoin 1LakshmiPas encore d'évaluation
- Microprocessors AldosariDocument34 pagesMicroprocessors Aldosarikavi22656Pas encore d'évaluation
- Matlab and Simulink For Control SystemDocument35 pagesMatlab and Simulink For Control SystemLakshmiPas encore d'évaluation
- DCM SessoinDocument63 pagesDCM SessoinLakshmiPas encore d'évaluation
- Hy Wire CarDocument21 pagesHy Wire CarRahul SharmaPas encore d'évaluation
- ABS Case Study Session 4Document68 pagesABS Case Study Session 4LakshmiPas encore d'évaluation
- Fuel Cell Green Power Los Alamos ReviewDocument36 pagesFuel Cell Green Power Los Alamos Reviewale_xxx123Pas encore d'évaluation
- Geothermal Energy Technologies and CostsDocument3 pagesGeothermal Energy Technologies and CostsLakshmiPas encore d'évaluation
- Sinus InfectionsDocument5 pagesSinus InfectionsLakshmiPas encore d'évaluation
- Or Based A Synchronous Binary Search Sub ADCDocument3 pagesOr Based A Synchronous Binary Search Sub ADCLakshmiPas encore d'évaluation
- Polytechnic Lecturers NotificationDocument46 pagesPolytechnic Lecturers NotificationsareenckPas encore d'évaluation
- Jean Abreu CVDocument3 pagesJean Abreu CVABREUPas encore d'évaluation
- Compressed SensingDocument14 pagesCompressed Sensingnigel989Pas encore d'évaluation
- Implementation Guide C2MDocument127 pagesImplementation Guide C2MLafi AbdellatifPas encore d'évaluation
- Analytics and Maintenance of ICT ProjectsDocument26 pagesAnalytics and Maintenance of ICT ProjectsK-yanVehraaYomomaPas encore d'évaluation
- Power Point Chapter - 15Document6 pagesPower Point Chapter - 15Shahwaiz Bin Imran BajwaPas encore d'évaluation
- Artificial Intelligence Adversarial Search TechniquesDocument62 pagesArtificial Intelligence Adversarial Search TechniquesKhawir MahmoodPas encore d'évaluation
- (ED) .DC Amp Design With FETs Zero-TCDocument5 pages(ED) .DC Amp Design With FETs Zero-TCf826401Pas encore d'évaluation
- The Rope Memory-A Permanent Storage DeviceDocument14 pagesThe Rope Memory-A Permanent Storage DevicePaul CultreraPas encore d'évaluation
- Divisors and representations of integersDocument4 pagesDivisors and representations of integersAngeliePanerioGonzagaPas encore d'évaluation
- t370hw02 VC AuoDocument27 pagest370hw02 VC AuoNachiket KshirsagarPas encore d'évaluation
- SAP Model Company For FinanceDocument1 pageSAP Model Company For FinanceAmar UbhePas encore d'évaluation
- Peran Bumdes Dalam Pengelolaan Limbah Kelapa Sawit Di Desa Talang Jerinjing Kecamatan Rengat Barat Kabupaten Indragiri Hulu Provinsi RiauDocument11 pagesPeran Bumdes Dalam Pengelolaan Limbah Kelapa Sawit Di Desa Talang Jerinjing Kecamatan Rengat Barat Kabupaten Indragiri Hulu Provinsi RiauInnaka LestariPas encore d'évaluation
- MATHEMATICS IN THE MODERN WORLD Activity 1Document4 pagesMATHEMATICS IN THE MODERN WORLD Activity 1Ana Marie ValenzuelaPas encore d'évaluation
- Database Assignment OverviewDocument5 pagesDatabase Assignment Overviewitzaz yousafPas encore d'évaluation
- Shopping CartDocument40 pagesShopping CartveerusadarPas encore d'évaluation
- The Integration of Social Media Technologies For Teaching and Learning in Kenyan SchoolsDocument7 pagesThe Integration of Social Media Technologies For Teaching and Learning in Kenyan SchoolsIJRIT JournalPas encore d'évaluation
- Your Order Has Been ApprovedDocument5 pagesYour Order Has Been ApprovedSUBA NANTINI A/P M.SUBRAMANIAMPas encore d'évaluation
- Accounting 12 Course OutlineDocument3 pagesAccounting 12 Course OutlineKenrose LaguyoPas encore d'évaluation
- DC-DC Boost Converter: A Project Report SubmittedDocument7 pagesDC-DC Boost Converter: A Project Report SubmittedSantosh PadhiPas encore d'évaluation
- Introduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptDocument21 pagesIntroduction To Deep Learning: Technical Seminar by Md. Abul Fazl (14261A05A0) CSE DeptpavansfdsfPas encore d'évaluation
- Translated Camera Test Equipment ManualDocument43 pagesTranslated Camera Test Equipment ManualAltaf HussainPas encore d'évaluation
- CS121Document2 pagesCS121Ikon TrashPas encore d'évaluation
- Control System Engineering: The LecturerDocument8 pagesControl System Engineering: The LecturerХанифъ РахманPas encore d'évaluation
- SAP SRM 7.0 Strategic SourcingDocument90 pagesSAP SRM 7.0 Strategic SourcingSergio Martinez PerezPas encore d'évaluation
- Withdrawal Withdrawal Withdrawal WithdrawalDocument15 pagesWithdrawal Withdrawal Withdrawal WithdrawalAradhya 19-1807Pas encore d'évaluation
- LearnTube Project ReportDocument14 pagesLearnTube Project ReportManogya Pratap SinghPas encore d'évaluation
- Apollo247 247201631 Labinvoice CompleteDocument1 pageApollo247 247201631 Labinvoice CompleteAjay VanaparthiPas encore d'évaluation
- LP in LogarithmsDocument5 pagesLP in LogarithmsDon Joey Loyola PontevedraPas encore d'évaluation
- Allwinner H5 DatasheetDocument68 pagesAllwinner H5 DatasheetSuperFly SmithPas encore d'évaluation
- Critical Path MethodDocument6 pagesCritical Path Method6 4 8 3 7 JAYAASRI KPas encore d'évaluation