Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 3 - Time Response AnalysisDocument24 pages3 - Time Response Analysisahmed4665Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- 5 - Stability & Root LocusDocument10 pages5 - Stability & Root Locusahmed4665Pas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 6 - Analyzing State-Space CharacteristicDocument20 pages6 - Analyzing State-Space Characteristicahmed4665100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- 4 - Frequency Response AnalysisDocument30 pages4 - Frequency Response Analysisahmed4665Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- AC Signals & SamplingDocument10 pagesAC Signals & Samplingahmed4665Pas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Counters and DAQDocument61 pagesCounters and DAQahmed4665Pas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Data Acquisition (DAQ) 1Document57 pagesData Acquisition (DAQ) 1ahmed4665100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Reading and Writing Audio Files in LabVIEWDocument15 pagesReading and Writing Audio Files in LabVIEWahmed4665Pas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- ParallelismDocument16 pagesParallelismahmed4665Pas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- How To Use 6211Document23 pagesHow To Use 6211ahmed4665Pas encore d'évaluation
- LabVIEW ArraysDocument17 pagesLabVIEW Arraysahmed4665100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- How To Communicate With Parallel PortDocument24 pagesHow To Communicate With Parallel Portahmed4665100% (6)
- State MachinesDocument28 pagesState Machinesahmed4665Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- LabVIEW ClustersDocument9 pagesLabVIEW Clustersahmed4665Pas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- LabVIEW Charts & GraphsDocument29 pagesLabVIEW Charts & Graphsahmed4665100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Labview File IoDocument18 pagesLabview File Ioahmed4665Pas encore d'évaluation
- LabVIEW Data Types & Conversions Between These TypesDocument23 pagesLabVIEW Data Types & Conversions Between These Typesahmed4665100% (4)
- LabVIEW StringsDocument11 pagesLabVIEW Stringsahmed4665Pas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Let'S Learn Algebra in Earl'S Way The Easy Way!Document23 pagesLet'S Learn Algebra in Earl'S Way The Easy Way!Cristinejoy OletaPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Ap16 FRQ Chinese LanguageDocument14 pagesAp16 FRQ Chinese LanguageSr. RZPas encore d'évaluation
- Internet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameDocument42 pagesInternet-Of-Things (Iot) : Summer Engineering Program 2018 University of Notre DameMAFOQ UL HASSANPas encore d'évaluation
- V2X SurveyDocument37 pagesV2X SurveyAniket panditPas encore d'évaluation
- U03-Exception HandlingDocument22 pagesU03-Exception Handlingdhyan114Pas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- PLS2 Instruction From W451Document9 pagesPLS2 Instruction From W451Papahnya Qiana MaulinaPas encore d'évaluation
- Math Lecture 1Document37 pagesMath Lecture 1Mohamed A. TaherPas encore d'évaluation
- Ameer Hamza (iOS Developer)Document4 pagesAmeer Hamza (iOS Developer)Ali ImranPas encore d'évaluation
- Micrologix 1400 IntroductionDocument7 pagesMicrologix 1400 IntroductionsayedmhPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Edc 4 UnitDocument26 pagesEdc 4 UnitAnonymous 6Ts3r7dwPas encore d'évaluation
- Invoicing System v2Document26 pagesInvoicing System v2api-137303031Pas encore d'évaluation
- Ieee Surg Arrestor .0) enDocument9 pagesIeee Surg Arrestor .0) enAjmed AliPas encore d'évaluation
- A Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDocument11 pagesA Branch-And-Bound Algorithm For The Time-Dependent Travelling Salesman ProblemDaniel FernándezPas encore d'évaluation
- M.Des IIT Delhi Brochure PDFDocument22 pagesM.Des IIT Delhi Brochure PDFAnandu KBPas encore d'évaluation
- Solution To Optimal Power Flow by PSODocument5 pagesSolution To Optimal Power Flow by PSOgallantprakashPas encore d'évaluation
- SocioDocument3 pagesSocioSomesh PandeyPas encore d'évaluation
- ECT Checking PDFDocument11 pagesECT Checking PDFEdidjo DarwinPas encore d'évaluation
- Design and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating ConditionsDocument8 pagesDesign and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating Conditionsrakeshee2007Pas encore d'évaluation
- Advanced Electrical Rule Checking in IC: Siemens Digital Industries SoftwareDocument7 pagesAdvanced Electrical Rule Checking in IC: Siemens Digital Industries SoftwareMOHSIN_IIUIPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Amazfit Bip U User Guide: ContentDocument48 pagesAmazfit Bip U User Guide: ContentbadriharishPas encore d'évaluation
- Schneider Electric Price List Feb 2020 V2Document478 pagesSchneider Electric Price List Feb 2020 V2Amr SohilPas encore d'évaluation
- Course No.: CE-331A, Geoinformatics (3-0-2-0)Document2 pagesCourse No.: CE-331A, Geoinformatics (3-0-2-0)Pranjal SinghPas encore d'évaluation
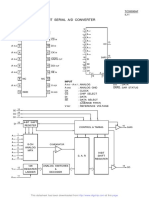
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocument1 pageC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangPas encore d'évaluation
- Annotated BibliographyDocument5 pagesAnnotated Bibliographyapi-284997804100% (1)
- Fda Ora Lab Manual Basics Statistics Data PresentationDocument25 pagesFda Ora Lab Manual Basics Statistics Data PresentationDoaa KhalilPas encore d'évaluation
- Seminar Report On Virtual Laser KeyboardDocument18 pagesSeminar Report On Virtual Laser KeyboardAnimesh71% (7)
- Cheatsheet Supervised LearningDocument4 pagesCheatsheet Supervised Learningan7l7aPas encore d'évaluation
- Keithley 182 Quick GuideDocument38 pagesKeithley 182 Quick GuideChih-Wei ChangPas encore d'évaluation
- Absensi Kelas Xii 2020-2021Document28 pagesAbsensi Kelas Xii 2020-2021Anastasya NanggoPas encore d'évaluation
- JNTU Old Question Papers 2007Document8 pagesJNTU Old Question Papers 2007Srinivasa Rao GPas encore d'évaluation