Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Developing EV Charging Stations in VietnamDocument28 pagesDeveloping EV Charging Stations in VietnamQuang Linh Lê100% (1)
- Grid PV SystemDocument21 pagesGrid PV Systembhuvana_eeePas encore d'évaluation
- Solved Examples For The Course Power ElectronicsDocument16 pagesSolved Examples For The Course Power ElectronicsSolomon Tadesse Athlaw100% (2)
- Multilevel 5 Step Cascaded Sine Wave Inverter CircuitDocument1 pageMultilevel 5 Step Cascaded Sine Wave Inverter CircuitStefan CorneaPas encore d'évaluation
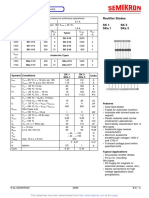
- Rectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16Document4 pagesRectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16jorgePas encore d'évaluation
- Shahbaz Research Paper Fcs MPCDocument6 pagesShahbaz Research Paper Fcs MPCMurtaza ALI KhooharoPas encore d'évaluation
- Project TitleDocument12 pagesProject TitleYoussef RamadanPas encore d'évaluation
- Smps Mosfet: IRF3704 IRF3704S IRF3704LDocument11 pagesSmps Mosfet: IRF3704 IRF3704S IRF3704Lalllim88Pas encore d'évaluation
- L1, L2 - IntroductionDocument151 pagesL1, L2 - Introductionsrnankit0% (1)
- Simulink Bms Development White PaperDocument15 pagesSimulink Bms Development White PaperDIMI EKONGA NZELLYPas encore d'évaluation
- DSH 332-207 1Document4 pagesDSH 332-207 1alizanelectronicPas encore d'évaluation
- Tiri StoresDocument2 pagesTiri StoresgdgdgdgPas encore d'évaluation
- IEC Method for Sizing Protection Current TransformersDocument3 pagesIEC Method for Sizing Protection Current TransformersUjjal ChakmaPas encore d'évaluation
- Ramp Control of a Single Phase Half Converter Lab ReportDocument6 pagesRamp Control of a Single Phase Half Converter Lab ReportKazi ShahadatPas encore d'évaluation
- Chapter 3 Clippers, Clampers & Voltage MultipliersDocument6 pagesChapter 3 Clippers, Clampers & Voltage MultipliersTarisai DoroPas encore d'évaluation
- BXE Experiment No.4Document6 pagesBXE Experiment No.4DsgawaliPas encore d'évaluation
- Bs-El-344 - Lecture-04 - P3Document14 pagesBs-El-344 - Lecture-04 - P3Bushra IbrahimPas encore d'évaluation
- Lab 1 Muhammad Amirul Adli 09dem19f1032Document8 pagesLab 1 Muhammad Amirul Adli 09dem19f1032hani adliPas encore d'évaluation
- Low Power, Stereo DAC W/headphone & Speaker Amps: FeaturesDocument66 pagesLow Power, Stereo DAC W/headphone & Speaker Amps: FeaturesAda Dev CsabaPas encore d'évaluation
- Seminar Report On Electric RelayDocument37 pagesSeminar Report On Electric RelayArvind Singh KasanaPas encore d'évaluation
- Use of Transil As Rectifier Diodes-Cd00003885Document4 pagesUse of Transil As Rectifier Diodes-Cd00003885Dan EsentherPas encore d'évaluation
- Power Diodes TutorialDocument3 pagesPower Diodes TutorialAvinesh ChandPas encore d'évaluation
- Cross Reference Diodo PDFDocument23 pagesCross Reference Diodo PDFcarlos16702014Pas encore d'évaluation
- Improvement of Power Quality Using PQ-theory Shunt-Active Power FilterDocument6 pagesImprovement of Power Quality Using PQ-theory Shunt-Active Power FilterPradnya TantarpalePas encore d'évaluation
- Power SystemsDocument87 pagesPower SystemsSreevas AredathPas encore d'évaluation
- Buck Converter Basics & Selection of ComponentsDocument22 pagesBuck Converter Basics & Selection of ComponentsSateesh TalisettyPas encore d'évaluation
- EE Syllabus 3rd To 8th Sem - 2018-19Document112 pagesEE Syllabus 3rd To 8th Sem - 2018-19rakesh shuklaPas encore d'évaluation
- High Power Factor Soft SwitchedDocument7 pagesHigh Power Factor Soft SwitchedMohan KrishnaPas encore d'évaluation
- Schematic Diagram - Main Section (1/3) - : (Mode:Play)Document4 pagesSchematic Diagram - Main Section (1/3) - : (Mode:Play)Pedro BancayanPas encore d'évaluation
- 6.3.2. Forward ConverterDocument12 pages6.3.2. Forward ConverterZia AteeqPas encore d'évaluation